Starlink Beacons for Passive LEO-Aided 9D Navigation
Pith reviewed 2026-05-21 06:51 UTC · model grok-4.3
The pith
Starlink downlink beacons supply Doppler-rate observables that complement GPS and IMU to maintain 9D navigation when GNSS is disrupted.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper presents an end-to-end LEO-aided hybrid framework that fuses GPS, Starlink downlink beacons, and an IMU in a 9D PNT system using an extended Kalman filter. Doppler-rate is extracted from Starlink downlink beacon tones after association with satellite IDs, then benchmarked against OFDM-derived range observables under the same estimation pipeline before integration into inertial navigation. Fisher-information predictions, Monte Carlo simulations, and hardware measurements demonstrate that Starlink Doppler-rate supplies meaningful complementary PNT information and can aid 9D estimation when GNSS is degraded or intermittently unavailable.
What carries the argument
Fusion of passively extracted Starlink Doppler-rate observables with GPS and IMU data inside an extended Kalman filter for joint 9D state estimation.
If this is right
- Starlink/IMU fusion alone can sustain 9D estimates during periods when GPS is unavailable.
- Doppler-rate from Starlink adds information distinct from OFDM range observables under the same processing chain.
- The hybrid EKF maintains navigation continuity in contested maritime environments without new hardware.
- Hardware measurements confirm that simulation-predicted accuracy gains appear in real receivers.
Where Pith is reading between the lines
- Similar Doppler-rate extraction could be applied to other LEO constellations to increase measurement diversity.
- The passive nature of the method may allow retrofitting existing receivers for added resilience against spoofing.
- Longer observation arcs or multi-constellation fusion could further tighten the attitude estimates.
- Testing under controlled jamming would quantify how much the Starlink component extends outage tolerance.
Load-bearing premise
Starlink downlink beacon tones can be reliably extracted, linked to specific satellite IDs, and turned into usable Doppler-rate measurements in a fully passive way without any dedicated infrastructure or cooperative transmitters.
What would settle it
A field trial in which Starlink beacon tones cannot be consistently detected or correctly associated with satellite identities under realistic interference would show that the Doppler-rate observable cannot be formed as assumed.
Figures




read the original abstract
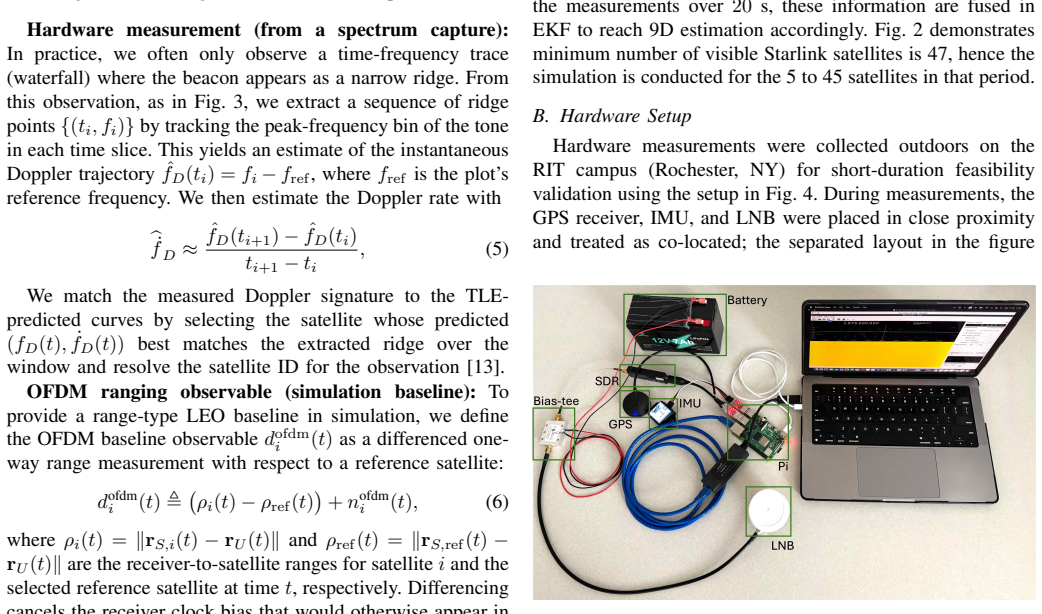
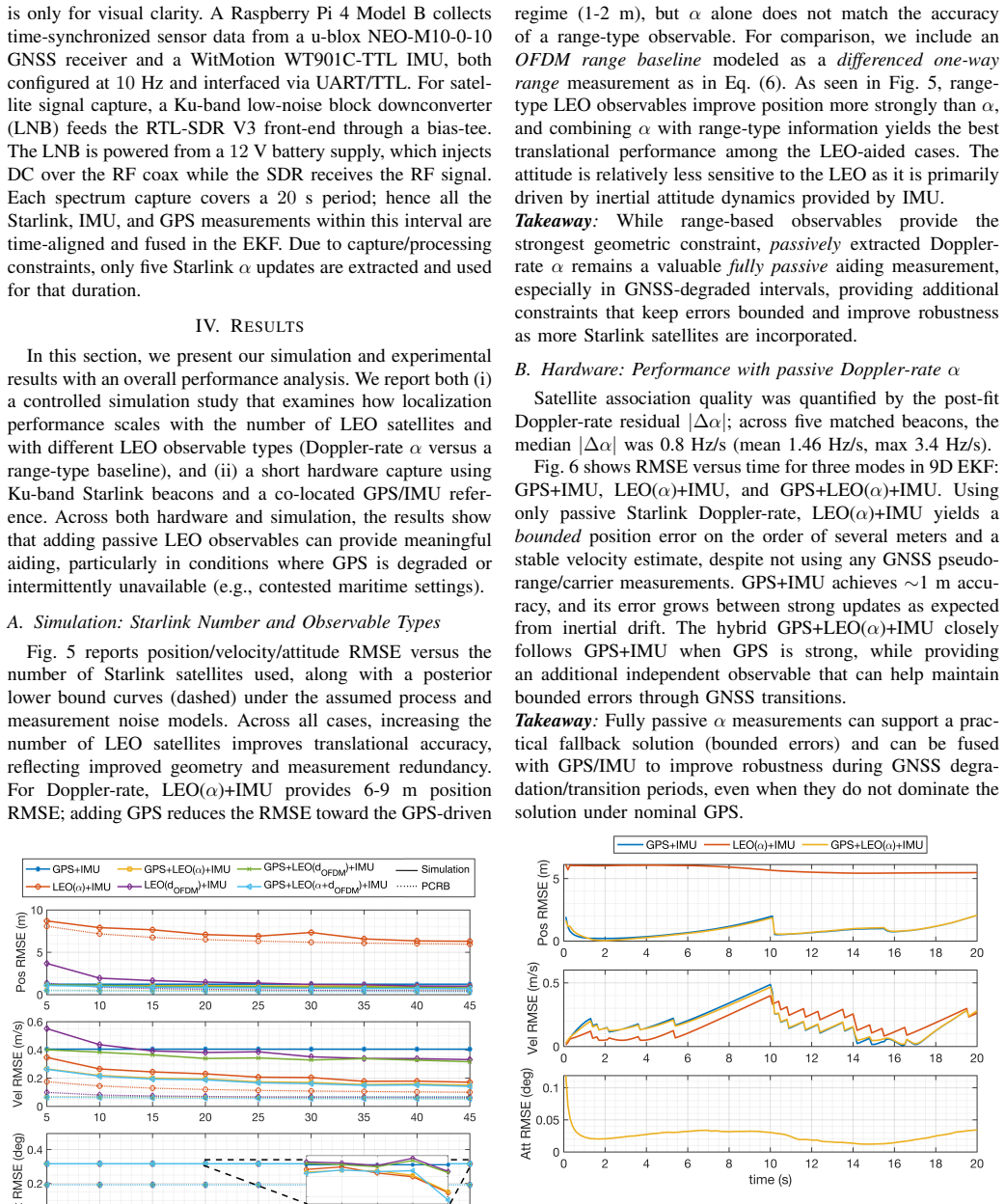
Global Navigation Satellite Systems (GNSS) underpin positioning, navigation, and timing (PNT), yet their low-power signals are easily blocked or disrupted, leaving gaps in PNT availability in contested environments (e.g. maritime settings) where interference, spoofing, or denial can occur. A key practical need is an independent, ubiquitous aiding signal that can be tracked passively and fused with inertial sensing to sustain full navigation-state estimation without dedicated or cooperative infrastructure. This paper presents an end-to-end LEO-aided hybrid framework that fuses GPS, Starlink downlink beacons, and an inertial measurement unit (IMU) in a 9D (3D position, 3D velocity, and 3D attitude) PNT system using an extended Kalman filter (EKF). We (i) extract Doppler-rate from Starlink downlink beacon tones by associating measurements with satellite IDs, (ii) benchmark beacon Doppler-rate against OFDM-derived range observables under a common processing/estimation pipeline, and (iii) integrate the resulting observable into inertial navigation. We evaluate GPS/IMU, Starlink/IMU, and GPS-Starlink-IMU using Fisher-information predictions, Monte Carlo simulations, and hardware measurements. Results show that Starlink Doppler-rate provides meaningful complementary PNT information, and can aid 9D estimation when GNSS is degraded or intermittently unavailable.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents an end-to-end LEO-aided hybrid PNT framework fusing GPS, Starlink downlink beacons, and IMU measurements in a 9D extended Kalman filter for positioning, velocity, and attitude estimation. It extracts Doppler-rate observables from Starlink beacon tones via association with satellite IDs, benchmarks these against OFDM-derived range observables under a common pipeline, and integrates the results into inertial navigation. Evaluation combines Fisher-information analysis, Monte Carlo simulations, and hardware measurements, with the central claim that Starlink Doppler-rate supplies meaningful complementary information to aid 9D estimation when GNSS is degraded or intermittently unavailable.
Significance. If the results hold under realistic passive conditions, the work could demonstrate a practical, infrastructure-free aiding signal for resilient navigation in contested environments using existing Starlink downlinks. The reliance on standard EKF fusion and focus on Doppler-rate observables (rather than requiring cooperative transmitters) is a methodological strength that aligns with operational needs in maritime settings. However, the absence of any quantitative metrics, error models, or processing details in the abstract makes the magnitude of the claimed Fisher-information gains and complementary-PNT benefit difficult to assess at present.
major comments (2)
- [Abstract] Abstract: the central claim that 'Starlink Doppler-rate provides meaningful complementary PNT information' is stated without any reported quantitative values, covariance reductions, or specific Fisher-information gains from the analysis, Monte Carlo trials, or hardware campaign. This omission leaves the support for the 9D estimation benefit difficult to evaluate and is load-bearing for the paper's contribution.
- [Abstract] Abstract (method description): the extraction step relies on 'associating measurements with satellite IDs' to produce usable Doppler-rate observables in a fully passive receiver. The 9D state observability (especially attitude) from Doppler-rate alone is sensitive to even modest association errors or missed detections; without explicit details on passive ID association, error models for association failures, or confirmation that the hardware campaign avoids oracle-level ID knowledge or ephemeris-aided matching, the reported benefits may not transfer to the claimed contested maritime regime.
minor comments (1)
- [Abstract] Abstract: consider adding one or two key quantitative results (e.g., position RMSE reduction or information gain percentages) to make the summary of findings more informative for readers.
Simulated Author's Rebuttal
We thank the referee for the thorough and constructive review of our manuscript. The comments highlight important aspects of clarity in the abstract and robustness of the passive processing pipeline. We address each major comment below and indicate the revisions we will make.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that 'Starlink Doppler-rate provides meaningful complementary PNT information' is stated without any reported quantitative values, covariance reductions, or specific Fisher-information gains from the analysis, Monte Carlo trials, or hardware campaign. This omission leaves the support for the 9D estimation benefit difficult to evaluate and is load-bearing for the paper's contribution.
Authors: We agree that the abstract would be strengthened by including concrete quantitative support for the central claim. The current abstract is intentionally concise, but we will revise it to report specific results, including the Fisher-information-predicted covariance reductions, the Monte Carlo RMSE improvements for position/velocity/attitude, and the hardware-measured error statistics when Starlink Doppler-rate is added to the GPS/IMU baseline. These values will be drawn directly from the analysis, simulation, and experimental sections. revision: yes
-
Referee: [Abstract] Abstract (method description): the extraction step relies on 'associating measurements with satellite IDs' to produce usable Doppler-rate observables in a fully passive receiver. The 9D state observability (especially attitude) from Doppler-rate alone is sensitive to even modest association errors or missed detections; without explicit details on passive ID association, error models for association failures, or confirmation that the hardware campaign avoids oracle-level ID knowledge or ephemeris-aided matching, the reported benefits may not transfer to the claimed contested maritime regime.
Authors: We acknowledge the referee's concern about the sensitivity of 9D observability to association errors. The full manuscript (Section III-B) describes a passive association procedure that matches observed beacon tones to Starlink satellite IDs using publicly available ephemeris, known beacon frequency offsets, and time-of-arrival consistency; no cooperative transmission or oracle information is used. To make this explicit and address potential failure modes, we will add (i) a dedicated paragraph on the association algorithm with pseudocode, (ii) an error model for missed detections and false associations based on SNR and tone spacing, and (iii) a Monte Carlo sensitivity study quantifying the degradation in attitude and position accuracy under realistic association error rates. We will also clarify in the hardware section that the campaign used a standard passive SDR receiver with real over-the-air Starlink signals and the same blind association method, without any pre-matching or ephemeris-aided oracle. revision: yes
Circularity Check
Derivation chain is self-contained with no circular reductions
full rationale
The paper describes an end-to-end framework that extracts Doppler-rate observables from Starlink downlink beacons via association with satellite IDs, then fuses these with GPS and IMU measurements inside a standard extended Kalman filter for 9D state estimation. The extraction step is presented as a signal-processing procedure, the fusion follows conventional EKF equations, and performance is assessed through independent Fisher-information analysis, Monte Carlo trials, and hardware data collection. No self-definitional loops appear, no fitted parameters are relabeled as predictions, and no load-bearing self-citations reduce the central claim to unverified prior results. The reported complementary-PNT benefit therefore follows from the applied observables and estimator rather than being presupposed by construction.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinctionreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
extract Doppler-rate from Starlink downlink beacon tones by associating measurements with satellite IDs... fuse GPS, Starlink downlink beacons, and IMU in a 9D EKF
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
F. S. Prol et al., “Position, Navigation, and Timing (PNT) Through Low Earth Orbit (LEO) Satellites: A Survey on Current Status, Challenges, and Opportunities,”IEEE Access, vol. 10, pp. 83971–84002, 2022
work page 2022
-
[2]
B. Kumar, Y . Chen, N. G. Prelcic, T. Shimizu, and A. Ganlath, “DeepSatLoc: A Multimodal Fusion Strategy for Enhanced Localization in Urban Canyons Exploiting GPS and LEO Satellite Communication Signals,” in Proc. 2024 58th Asilomar Conf. Signals, Syst., Comput., Pacific Grove, CA, USA, 2024, pp. 842–849
work page 2024
-
[3]
J. McDowell, “Starlink Statistics,” Jonathan’s Space Pages, accessed: Jan. 30, 2026. [Online]. Available: https://planet4589.org/space/con/star/stats.html
work page 2026
-
[4]
Survey on Opportunistic PNT With Signals From LEO Communication Satellites
W. Stock, R. T. Schwarz, C. A. Hofmann, and A. Knopp, “Survey on Opportunistic PNT With Signals From LEO Communication Satellites” IEEE Communications Surveys & Tutorials, vol. 27, no. 1, pp. 77–107, Feb. 2025
work page 2025
-
[5]
A Performance Study on the Combina- tion of Available GNSS and Potential LEO-PNT Constellations,
K. C ¸ elikbilek and E. S. Lohan, “A Performance Study on the Combina- tion of Available GNSS and Potential LEO-PNT Constellations,”IEEE Access, vol. 12, pp. 162909–162917, 2024
work page 2024
-
[6]
PNT Through Optimised LEO Constellation and INS,
H. More, R. Gerardi, C. Stallo, M. De Sanctis, and E. Cianca, “PNT Through Optimised LEO Constellation and INS,” in Proc. 35th Int. Tech. Meeting Satell. Division Inst. Navigation (ION GNSS+), Denver, CO, USA, Sep. 2022, pp. 1428–1441
work page 2022
-
[7]
Y . Wang, B. Zhao, W. Zhang, and K. Li, “Simulation Experiment and Analysis of GNSS/INS/LEO/5G Integrated Navigation Based on Federated Filtering Algorithm,”Sensors, vol. 22, no. 2, Art. no. 550, 2022
work page 2022
-
[8]
Joint 9D Re- ceiver Localization and Ephemeris Correction with LEO and 5G Base Stations,
D.-R. Emenonye, H. S. Dhillon, and R. M. Buehrer, “Joint 9D Re- ceiver Localization and Ephemeris Correction with LEO and 5G Base Stations,” in Proc. MILCOM 2024 – IEEE Military Communications Conference, Washington, DC, USA, 2024, pp. 330–335
work page 2024
-
[9]
Practical Use of Starlink Downlink Tones for Positioning,
N. Jardak and R. Adam, “Practical Use of Starlink Downlink Tones for Positioning,”Sensors, vol. 23, no. 6, Art. no. 3234, 2023
work page 2023
-
[10]
Ad Astra: Simultaneous Tracking and Navigation With Megaconstellation LEO Satellites,
Z. M. Kassas, N. Khairallah, and S. Kozhaya, “Ad Astra: Simultaneous Tracking and Navigation With Megaconstellation LEO Satellites,”IEEE Aerosp. Electron. Syst. Mag., vol. 39, no. 9, pp. 46–71, 2024
work page 2024
-
[11]
National Ocean Service, NOAA,User’s Guide for GPS Observations at Tide and Water Level Station Bench Marks, Engineering Division, Center for Operational Oceanographic Products and Services, Mar
-
[12]
Available: https://tidesandcurrents.noaa.gov/publications/Users Guide for GPS Observations updated March 2013 FINAL.pdf
work page 2013
-
[13]
Application for Modification of Authorization for the SpaceX NGSO Satellite System,
Space Exploration Holdings, LLC, “Application for Modification of Authorization for the SpaceX NGSO Satellite System,” FCC IBFS File No. SAT-MOD-20200417-00037, Apr. 2020. Available: https://fcc. report/IBFS/SAT-MOD-20200417-00037/2274316.pdf
work page 2020
-
[14]
R. Rathi and Z. Zhang, “StarAngle: User Orientation Sensing with Bea- con Phase Measurements of Multiple Starlink Satellites,” in Proc. 21st ACM Conf. Embedded Networked Sensor Syst. (SenSys), Hangzhou, China, Nov. 2024, pp. 512–525
work page 2024
-
[15]
P. Tichavsky, C. H. Muravchik and A. Nehorai, ”Posterior Cramer-Rao bounds for discrete-time nonlinear filtering,” inIEEE Transactions on Signal Processing, vol. 46, no. 5, pp. 1386-1396, May 1998
work page 1998
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.