Max-Entropy Moment Filtering for Stochastic Hybrid Systems
Pith reviewed 2026-05-21 07:14 UTC · model grok-4.3
The pith
A maximum-entropy moment filter tracks non-Gaussian uncertainty in stochastic hybrid systems by correcting moments for reset events.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The hybrid MEM-KF performs filtering from partial statistical information by propagating moments through stochastic hybrid dynamics and reconstructing beliefs with moment-constrained maximum-entropy distributions. The key step is a moment propagation rule derived from Dynkin's formula with a jump-sum boundary-flux correction over the guard set. This yields tractable moment dynamics without solving the underlying hybrid PDE. In a stochastic bouncing-ball example, the method captures reset-induced non-Gaussianity through the corrected moment equations.
What carries the argument
The moment propagation rule with jump-sum boundary-flux correction over the guard set, which accounts for reset effects in the moment dynamics derived from Dynkin's formula.
Load-bearing premise
The moment propagation rule derived from Dynkin's formula with a jump-sum boundary-flux correction over the guard set provides a sufficient approximation to the true hybrid Fokker-Planck dynamics for consistent filtering.
What would settle it
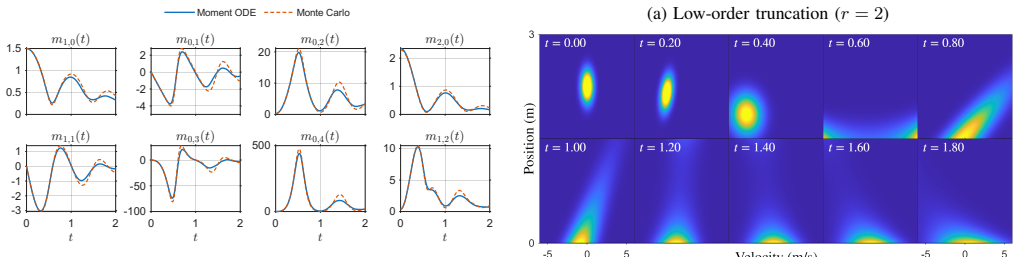
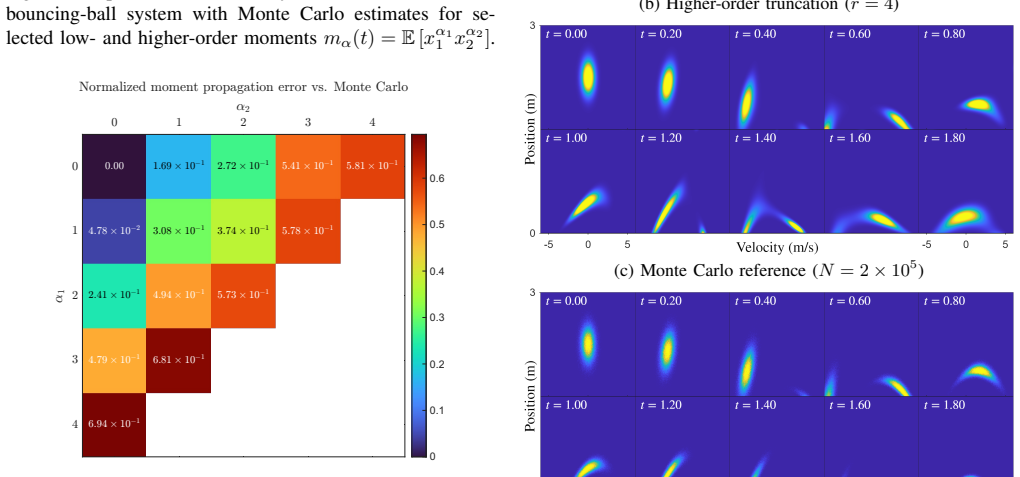
Running Monte Carlo simulations of the stochastic bouncing ball system and comparing the moments and reconstructed distributions from the filter against the empirical moments from many trajectories would falsify the claim if significant discrepancies appear in the non-Gaussian features after resets.
Figures



read the original abstract
Stochastic hybrid systems combine continuous-time stochastic dynamics with discrete reset events, producing intrinsically non-Gaussian and often multimodal uncertainty. A consistent propagation law must also account for boundary-induced probability flux across guard sets, making direct density propagation through hybrid Fokker-Planck equations expensive. We develop a hybrid extension of the Max-Entropy Moment Kalman Filter (MEM-KF) that performs filtering from partial statistical information by propagating a finite collection of moments through stochastic hybrid dynamics and reconstructing beliefs using moment-constrained maximum-entropy distributions. The key step is a moment propagation rule derived from Dynkin's formula with a jump-sum, in which reset effects appear as a boundary-flux correction over the guard set. This yields tractable moment dynamics without solving the underlying hybrid PDE. In a stochastic bouncing-ball example, the proposed method captures reset-induced non-Gaussianity through corrected moment equations while retaining the MEM-KF's optimization-based maximum-entropy representation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript develops a hybrid extension of the Max-Entropy Moment Kalman Filter (MEM-KF) for stochastic hybrid systems. It derives a moment propagation rule from Dynkin's formula that incorporates a jump-sum boundary-flux correction over guard sets to account for reset events, yielding tractable moment dynamics without solving the underlying hybrid Fokker-Planck PDE. The approach is illustrated on a stochastic bouncing-ball example, where the corrected moments are claimed to capture reset-induced non-Gaussianity while retaining the optimization-based maximum-entropy belief representation.
Significance. If the central derivation is shown to be consistent, the work would provide a practical moment-based filtering method for hybrid stochastic systems that naturally produces non-Gaussian beliefs, which is relevant for applications such as impact dynamics or switched systems. The use of Dynkin's formula as the starting point is a standard and appropriate tool, and the retention of the max-entropy reconstruction step is a clear strength that avoids ad-hoc density assumptions.
major comments (2)
- [Section 3] The moment propagation rule (Section 3, derivation following Dynkin's formula): the jump-sum boundary-flux correction is asserted to close the dynamics using only the tracked moments, but for state-dependent or nonlinear reset maps the flux integral over the guard set generally involves expectations that couple to higher-order moments. No explicit closure assumption or proof that the correction remains within the chosen moment set is provided, which is load-bearing for the claim of consistent filtering.
- [Section 4] Stochastic bouncing-ball example (Section 4): the abstract states that the method captures reset-induced non-Gaussianity through the corrected moment equations, yet no quantitative results, error metrics (e.g., moment errors, Wasserstein distance, or comparison to Monte-Carlo ground truth), or validation details are supplied. This absence prevents assessment of whether the boundary-flux term produces accurate propagated moments.
minor comments (2)
- Notation for the guard set, reset map, and the precise form of the jump-sum term should be introduced with a dedicated preliminary subsection to improve readability for readers unfamiliar with hybrid stochastic processes.
- The abstract would benefit from a brief statement of the number of moments tracked and the optimization problem solved at each filter step.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and positive evaluation of the potential impact of our work on moment-based filtering for stochastic hybrid systems. We provide point-by-point responses to the major comments below and outline the revisions we will make to address them.
read point-by-point responses
-
Referee: [Section 3] The moment propagation rule (Section 3, derivation following Dynkin's formula): the jump-sum boundary-flux correction is asserted to close the dynamics using only the tracked moments, but for state-dependent or nonlinear reset maps the flux integral over the guard set generally involves expectations that couple to higher-order moments. No explicit closure assumption or proof that the correction remains within the chosen moment set is provided, which is load-bearing for the claim of consistent filtering.
Authors: We thank the referee for highlighting this important aspect of the derivation. The current manuscript presents the moment propagation rule derived from Dynkin's formula with the boundary-flux correction term expressed as an integral over the guard set. For the class of systems considered, including the linear reset maps in the bouncing-ball example, this term can be evaluated using the available moments when combined with the maximum-entropy reconstruction. However, we agree that a more explicit statement of the closure properties is warranted. In the revised version, we will add a paragraph in Section 3 discussing the conditions under which the correction closes within the moment set (e.g., affine resets and polynomial guard functions) and note that for fully nonlinear cases, moment closure approximations may be employed as in standard moment methods. revision: yes
-
Referee: [Section 4] Stochastic bouncing-ball example (Section 4): the abstract states that the method captures reset-induced non-Gaussianity through the corrected moment equations, yet no quantitative results, error metrics (e.g., moment errors, Wasserstein distance, or comparison to Monte-Carlo ground truth), or validation details are supplied. This absence prevents assessment of whether the boundary-flux term produces accurate propagated moments.
Authors: We acknowledge that the example section would benefit from quantitative validation to better demonstrate the effectiveness of the proposed correction. In the revised manuscript, we will augment Section 4 with numerical comparisons against Monte Carlo simulations. Specifically, we will report the errors in the propagated moments (e.g., mean and variance errors) and include a metric such as the Kullback-Leibler divergence or Wasserstein distance between the maximum-entropy reconstructed density and the empirical distribution obtained from a large number of sample paths. This will provide concrete evidence that the boundary-flux term improves the accuracy of the moment propagation. revision: yes
Circularity Check
Derivation from standard Dynkin's formula is self-contained
full rationale
The paper's central derivation applies Dynkin's formula (a standard result from stochastic processes) to obtain moment dynamics for hybrid systems, then augments it with an explicit boundary-flux correction term over the guard set to account for resets. This step is presented as a direct consequence of the formula rather than a fit to data or a self-referential definition. No equations reduce to their own inputs by construction, no parameters are fitted and then relabeled as predictions, and no load-bearing uniqueness or ansatz is imported via self-citation. The resulting moment propagation rule is therefore independent of the target filtering application and remains falsifiable against the underlying hybrid Fokker-Planck equation.
Axiom & Free-Parameter Ledger
axioms (1)
- standard math Dynkin's formula with jump-sum applies to the stochastic hybrid dynamics and yields the boundary-flux correction
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
moment propagation rule derived from Dynkin’s formula with a jump-sum, in which reset effects appear as a boundary-flux correction over the guard set
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Spectral bayesian estimation for general Stochastic Hybrid Systems,
W. Wang and T. Lee, “Spectral bayesian estimation for general Stochastic Hybrid Systems,”Automatica, vol. 117, p. 108989, 2020
work page 2020
-
[2]
M. Oprea, A. Shaw, R. Huq, K. Iwasaki, D. Kassabova, and W. Clark, “A study of the long-term behavior of hybrid systems with symmetries via reduction and the Frobenius–Perron operator,”SIAM Journal on Applied Dynamical Systems, vol. 23, no. 4, pp. 2899–2938, 2024
work page 2024
-
[3]
Uncertainty propagation of stochastic hybrid systems: a case study for types of jump,
T. K.C., W. Clark, and T. Lee, “Uncertainty propagation of stochastic hybrid systems: a case study for types of jump,”IFAC-PapersOnLine, vol. 59, no. 19, pp. 280–285, 2025, 13th IFAC Symposium on Nonlinear Control Systems NOLCOS 2025
work page 2025
-
[4]
Applebaum,L ´evy Processes and Stochastic Calculus, 2nd ed., ser
D. Applebaum,L ´evy Processes and Stochastic Calculus, 2nd ed., ser. Cambridge Studies in Advanced Mathematics. Cambridge University Press, 2009
work page 2009
-
[5]
J. Bect, “A unifying formulation of the Fokker–Planck–Kolmogorov equation for general stochastic hybrid systems,”Nonlinear Analysis: Hybrid Systems, vol. 4, no. 2, pp. 357–370, 2010, IFAC World Congress 2008
work page 2010
-
[6]
Maximum entropy in the problem of moments,
L. R. Mead and N. Papanicolaou, “Maximum entropy in the problem of moments,”Journal of Mathematical Physics, vol. 25, no. 8, pp. 2404–2417, 1984
work page 1984
-
[7]
Max Entropy Moment Kalman Filter for polynomial systems with arbitrary noise,
S. Teng, H. Zhang, D. Jin, A. Jasour, R. Vasudevan, M. Ghaffari, and L. Carlone, “Max Entropy Moment Kalman Filter for polynomial systems with arbitrary noise,” inThe Thirty-ninth Annual Conference on Neural Information Processing Systems, 2025
work page 2025
-
[8]
Global optimization with polynomials and the problem of moments,
J. B. Lasserre, “Global optimization with polynomials and the problem of moments,”SIAM Journal on Optimization, vol. 11, no. 3, pp. 796– 817, 2001
work page 2001
-
[9]
Cambridge Texts in Applied Mathematics
——,An Introduction to Polynomial and Semi-Algebraic Optimization, ser. Cambridge Texts in Applied Mathematics. Cambridge University Press, 2015
work page 2015
-
[10]
S. M. Kay,Fundamentals of Statistical Signal Processing, Volume I: Estimation Theory. Prentice Hall, 1993
work page 1993
-
[11]
J. Zhang, L. DeVille, S. Dhople, and A. D. Dom ´ınguez-Garc´ıa, “A maximum entropy approach to the moment closure problem for Stochastic Hybrid Systems at equilibrium,” in53rd IEEE Conference on Decision and Control, 2014, pp. 747–752
work page 2014
-
[12]
Estimation of non-normalized statistical models by score matching,
A. Hyv ¨arinen, “Estimation of non-normalized statistical models by score matching,”J. Mach. Learn. Res., vol. 6, pp. 695–709, 2005
work page 2005
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.