Quadratic Characterizations for Reachability Analysis of Neural Networks
Pith reviewed 2026-05-21 07:02 UTC · model grok-4.3
The pith
Verified quadratic inequalities from samples and sum-of-squares proofs yield tighter bounds for neural network reachability analysis.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
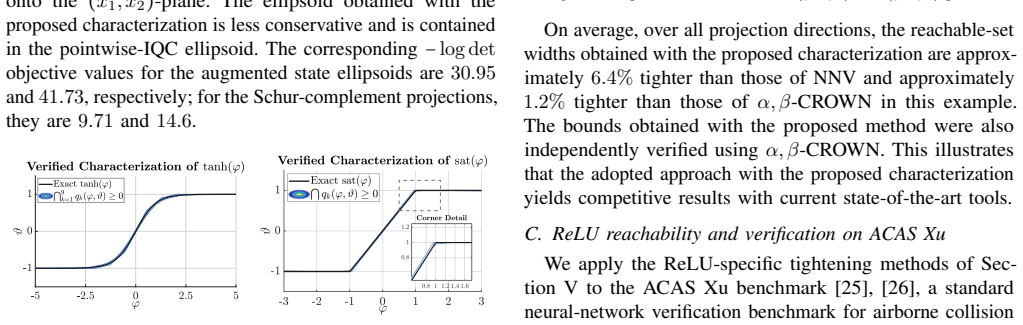
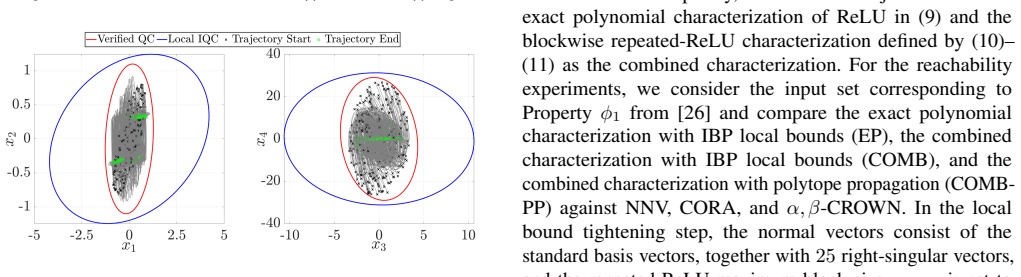
The authors develop a method to construct verified quadratic characterizations of scalar relations in the plane. They generate candidate quadratic inequalities locally via convex quadratic programs fitted to samples of the relation and exterior points, then verify them globally using sum-of-squares certificates on either exact semialgebraic sets or polynomial relaxations. These verified constraints form sound overapproximations that integrate directly into QC-based semidefinite programs for reachability and safety verification of feedforward neural networks, offering domain-specific improvements over generic bounds for activations like tanh and ReLU.
What carries the argument
The two-step construction of candidate quadratic inequalities via local convex quadratic programs on samples followed by global verification with sum-of-squares certificates over semialgebraic descriptions.
If this is right
- For tanh activations, the method produces domain-dependent quadratic constraints that serve as alternatives to standard sector or slope bounds.
- Exploiting dependencies between neurons in ReLU networks reduces conservatism in QC-based reachability analysis.
- The verified constraints can be embedded in semidefinite programs to perform reachability and safety analysis of feedforward neural networks.
- Numerical examples demonstrate improved reachability results for smooth activations and reduced conservatism for ReLU networks, with applicability to other nonlinearities such as saturation.
Where Pith is reading between the lines
- The same sample-plus-verification pipeline could be applied to nonlinearities in recurrent networks or hybrid dynamical systems to obtain tighter reachability sets.
- Lower overapproximation error may allow certification of deeper or wider networks that remain out of reach with generic quadratic bounds.
- The verified quadratic constraints could be combined with abstraction-refinement loops to further improve scalability of safety checks.
Load-bearing premise
The sum-of-squares certificates must succeed in proving that the candidate quadratic inequalities hold over the entire chosen domain for the given relations.
What would settle it
A concrete point inside the domain at which the scalar relation violates one of the generated quadratic inequalities, or a failure of the sum-of-squares solver to certify a valid inequality, would demonstrate that the overapproximation is unsound.
Figures

read the original abstract
Quadratic constraints (QCs) are widely used to characterize nonlinearities and uncertainties, but generic analytical characterizations can be conservative on bounded domains. This paper develops a framework for constructing verified quadratic characterizations of scalar relations in the two-dimensional real plane. Candidate quadratic inequalities are locally generated by solving convex quadratic programs using samples from the relation and exterior sample points. They are then verified globally using sum-of-squares certificates over an exact semialgebraic description or, in the case of nonpolynomial relations, over relaxed polynomial descriptions. The resulting verified constraints define a sound overapproximation of the scalar relations over the considered domains. These constraints are directly compatible with existing analysis frameworks based on QCs and pointwise integral quadratic constraints (IQCs) for static nonlinearities and uncertainties, and they can also be embedded in QC-based semidefinite programs for reachability and safety analysis of feedforward neural networks. For smooth activations such as $\tanh$, the method yields domain-dependent quadratic characterizations that constitute an alternative to generic sector- or slope-based descriptions. For ReLU networks, we give methods to reduce conservatism in QC-based reachability analysis of feedforward networks by exploiting dependencies between neurons and tighter local bounds. Numerical examples demonstrate improved reachability results for smooth activations, reduced conservatism for ReLU networks, and applicability beyond neural networks through an example involving saturation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper develops a framework to construct verified quadratic characterizations of scalar relations (e.g., activation functions) by generating candidate quadratic inequalities via sample-based convex QPs and certifying them globally with sum-of-squares (SOS) over exact semialgebraic sets or relaxed polynomial descriptions. The resulting sound overapproximations are embedded in QC-based SDPs for reachability and safety analysis of feedforward neural networks, with specific methods for tanh (domain-dependent alternatives to sector bounds) and ReLU (exploiting inter-neuron dependencies to reduce conservatism). Numerical examples illustrate improved results for both smooth activations and ReLU networks, plus an application to saturation.
Significance. If the SOS certificates close as claimed, the approach supplies a systematic, sound method for obtaining tighter, domain-specific quadratic constraints that integrate directly with existing QC and IQC frameworks. This addresses a known source of conservatism in NN reachability analysis. The explicit use of SOS for verification and the sample-to-certificate pipeline are strengths that support reproducibility and soundness; the ReLU dependency exploitation is a concrete advance over pointwise bounds.
major comments (2)
- [§4] §4 (SOS verification): the claim that SOS certificates over the exact semialgebraic description or relaxed polynomial description successfully verify the candidate quadratic inequalities globally is load-bearing for soundness, yet the manuscript provides no explicit degree bounds, monomial basis size, or failure cases for the reported domains; without these it is impossible to assess whether the certificates are non-vacuous or merely reproduce the sample-based candidates.
- [§5.2] §5.2 (ReLU dependency exploitation): the joint constraints used to reduce conservatism are described at a high level, but the manuscript does not show how the resulting quadratic matrix is assembled into the overall QC-SDP or whether the dependency encoding preserves the block-diagonal structure required by standard pointwise IQC solvers.
minor comments (2)
- [Abstract] The abstract states that the method applies 'beyond neural networks through an example involving saturation,' but the corresponding numerical example is only summarized; a brief statement of the saturation relation and the achieved tightness improvement would strengthen the generality claim.
- [§2] Notation for the quadratic form (e.g., the matrix P in the inequality x^T P x + 2 q^T x + r ≥ 0) is introduced without an explicit reference to the standard QC literature; adding one sentence linking to the usual (M, N) or (P, q, r) parametrization would improve readability.
Simulated Author's Rebuttal
We thank the referee for their thorough review and constructive feedback on our manuscript. We appreciate the recognition of the framework's potential to reduce conservatism in neural network reachability analysis. Below, we provide point-by-point responses to the major comments.
read point-by-point responses
-
Referee: [§4] §4 (SOS verification): the claim that SOS certificates over the exact semialgebraic description or relaxed polynomial description successfully verify the candidate quadratic inequalities globally is load-bearing for soundness, yet the manuscript provides no explicit degree bounds, monomial basis size, or failure cases for the reported domains; without these it is impossible to assess whether the certificates are non-vacuous or merely reproduce the sample-based candidates.
Authors: We agree that the manuscript would benefit from more explicit details on the SOS verification process to allow readers to fully evaluate the soundness and non-vacuous nature of the certificates. In the revised manuscript, we will include tables or text specifying the SOS polynomial degrees (e.g., degree 4 for tanh over [-1,1] and degree 2 for ReLU), the monomial basis sizes for each case, and any failure cases encountered during certification along with how they were resolved (e.g., by increasing degree or adjusting the relaxation). This will clarify that the certificates provide global verification independent of the samples. revision: yes
-
Referee: [§5.2] §5.2 (ReLU dependency exploitation): the joint constraints used to reduce conservatism are described at a high level, but the manuscript does not show how the resulting quadratic matrix is assembled into the overall QC-SDP or whether the dependency encoding preserves the block-diagonal structure required by standard pointwise IQC solvers.
Authors: The description in §5.2 is indeed at a high level, and we will expand it in the revision. We will add an explicit example or derivation showing how the joint quadratic constraints are combined into the overall quadratic form matrix for the QC-SDP. Regarding the block-diagonal structure, the dependency encoding is designed to preserve it by incorporating cross terms in a way that the per-layer or per-neuron blocks remain diagonal in the sense required by pointwise IQC solvers; we will provide a proof sketch or reference to the structure preservation in the revised text to confirm compatibility with standard solvers. revision: yes
Circularity Check
No significant circularity
full rationale
The paper constructs candidate quadratic inequalities via sample-based convex QPs, then certifies them globally using sum-of-squares over exact or relaxed semialgebraic sets. Soundness follows directly from the external SOS certificate implying the inequality holds on the relation; the verification step is independent of the candidate generation and does not reduce to a fitted parameter or self-citation. No load-bearing step equates a derived result to its own input by construction, and the method relies on standard external convex optimization and SOS solvers rather than re-deriving its premises.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Sum-of-squares certificates over semialgebraic or relaxed polynomial descriptions can verify candidate quadratic inequalities globally.
Reference graph
Works this paper leans on
-
[1]
System analysis via integral quadratic constraints,
A. Megretski and A. Rantzer, “System analysis via integral quadratic constraints,”IEEE Transactions on Automatic Control, vol. 42, no. 6, pp. 819–830, 1997
work page 1997
-
[2]
Robust stability and performance analysis based on integral quadratic constraints,
J. Veenman, C. W. Scherer, and H. Köro ˘glu, “Robust stability and performance analysis based on integral quadratic constraints,”European Journal of Control, vol. 31, pp. 1–32, 2016
work page 2016
-
[3]
Computa- tion of invariant sets for discrete-time uncertain systems,
E. Khalife, D. Abou Jaoude, M. Farhood, and P.-L. Garoche, “Computa- tion of invariant sets for discrete-time uncertain systems,”International Journal of Robust and Nonlinear Control, vol. 33, no. 14, pp. 8452– 8474, 2023
work page 2023
-
[4]
M. Fazlyab, M. Morari, and G. J. Pappas, “Safety verification and robustness analysis of neural networks via quadratic constraints and semidefinite programming,”IEEE Transactions on Automatic Control, vol. 67, no. 1, pp. 1–15, 2022
work page 2022
-
[5]
H. Hu, M. Fazlyab, M. Morari, and G. J. Pappas, “Reach-SDP: Reach- ability analysis of closed-loop systems with neural network controllers via semidefinite programming,” in2020 59th IEEE Conference on Decision and Control (CDC), 2020, pp. 5929–5934
work page 2020
-
[6]
J. M. Fry, D. Abou Jaoude, and M. Farhood, “Robustness analysis of uncertain time-varying systems using integral quadratic constraints with time-varying multipliers,”International Journal of Robust and Nonlinear Control, vol. 31, no. 3, pp. 733–758, 2021
work page 2021
-
[7]
Positive polynomials on compact semi-algebraic sets,
M. Putinar, “Positive polynomials on compact semi-algebraic sets,” Indiana Univ. Mathematics Journal, vol. 42, no. 3, pp. 969–984, 1993
work page 1993
-
[8]
Exploiting algebraic structure in sum of squares programs,
P. A. Parrilo, “Exploiting algebraic structure in sum of squares programs,” inPositive Polynomials in Control, D. Henrion and A. Garulli, Eds. Springer Berlin Heidelberg, 2005, pp. 181–194
work page 2005
-
[9]
Stability analysis using quadratic constraints for systems with neural network controllers,
H. Yin, P. Seiler, and M. Arcak, “Stability analysis using quadratic constraints for systems with neural network controllers,”IEEE Trans- actions on Automatic Control, vol. 67, no. 4, pp. 1980–1987, 2022
work page 1980
-
[10]
A complete set of quadratic constraints for repeated ReLU and generalizations,
S. V . Noori, B. Hu, G. Dullerud, and P. Seiler, “A complete set of quadratic constraints for repeated ReLU and generalizations,”IEEE Transactions on Automatic Control, pp. 1–14, 2025
work page 2025
-
[11]
Satisfiability modulo theories,
C. Barrett and C. Tinelli, “Satisfiability modulo theories,” inHandbook of Model Checking. Springer Intl. Publishing, 2018, pp. 305–343
work page 2018
-
[12]
Code-level formal verification of ellipsoidal invariant sets for linear parameter-varying systems,
E. Khalife, P.-L. Garoche, and M. Farhood, “Code-level formal verification of ellipsoidal invariant sets for linear parameter-varying systems,” inNASA Formal Methods, K. Y . Rozier and S. Chaudhuri, Eds. Cham: Springer Nature Switzerland, 2023, pp. 157–173
work page 2023
-
[13]
——, “Formally proving invariant systemic properties of control programs using ghost code and integral quadratic constraints,” inNASA Formal Methods, A. Dutle, L. Humphrey, and L. Titolo, Eds. Cham: Springer Nature Switzerland, 2025, pp. 180–200
work page 2025
-
[14]
Y . Bertot and P. Castéran,Interactive Theorem Proving and Program Development: Coq’Art: The Calculus of Inductive Constructions, ser. Texts in Theoretical Computer Science. Springer Verlag, 2004
work page 2004
-
[15]
J. C. Mason and D. C. Handscomb,Chebyshev Polynomials. Chapman and Hall/CRC, 2002
work page 2002
-
[16]
S. Boyd, L. El Ghaoui, E. Feron, and V . Balakrishnan,Linear Matrix Inequalities in System and Control Theory. SIAM, 1994
work page 1994
-
[17]
Restructuring of deep neural network acoustic models with singular value decomposition,
J. Xue, J. Li, and Y . Gong, “Restructuring of deep neural network acoustic models with singular value decomposition,” inInterspeech, 2013, pp. 2365–2369
work page 2013
- [18]
-
[19]
L. de Moura and N. Bjørner, “Z3: An efficient smt solver,” in TACAS’08/ETAPS’08. Springer Berlin Heidelberg, 2008, pp. 337–340
work page 2008
-
[20]
A collaborative framework for non-linear integer arithmetic reasoning in Alt-Ergo,
S. Conchon, M. Iguernelala, and A. Mebsout, “A collaborative framework for non-linear integer arithmetic reasoning in Alt-Ergo,” in2013 15th International Symposium on Symbolic and Numeric Algorithms for Scientific Computing. IEEE, 2013, pp. 161–168
work page 2013
-
[21]
D. J. Marquis, B. Wilhelm, D. Muniraj, and M. Farhood, “Adversarial reinforcement learning for robust control of fixed-wing aircraft under model uncertainty,” inProceedings of the 2026 American Control Conference, 2026, arXiv preprint arXiv:2510.16650
-
[22]
H.-D. Tran, X. Yang, D. Manzanas Lopez, P. Musau, L. V . Nguyen, W. Xiang, S. Bak, and T. T. Johnson, “NNV: The neural network verification tool for deep neural networks and learning-enabled cyber- physical systems,” inComputer Aided Verification, S. K. Lahiri and C. Wang, Eds. Springer International Publishing, 2020, pp. 3–17
work page 2020
-
[23]
M. Althoff, “An introduction to CORA 2015,” inProceedings of the 1st and 2nd Workshop on Applied Verification for Continuous and Hybrid Systems. EasyChair, 2015, pp. 120–151
work page 2015
-
[24]
S. Wang, H. Zhang, K. Xu, X. Lin, S. Jana, C.-J. Hsieh, and J. Z. Kolter, “Beta-Crown: Efficient bound propagation with per-neuron split constraints for neural network robustness verification,”Advances in Neural Information Processing Sys., vol. 34, pp. 29 909–29 921, 2021
work page 2021
-
[25]
Policy compression for aircraft collision avoidance systems,
K. D. Julian, J. Lopez, J. S. Brush, M. P. Owen, and M. J. Kochenderfer, “Policy compression for aircraft collision avoidance systems,” in2016 IEEE/AIAA 35th Digital Avionics Systems Conference, 2016, pp. 1–10
work page 2016
-
[26]
Reluplex: An efficient smt solver for verifying deep neural networks,
G. Katz, C. Barrett, D. L. Dill, K. Julian, and M. J. Kochenderfer, “Reluplex: An efficient smt solver for verifying deep neural networks,” inComputer Aided Verification, R. Majumdar and V . Kun ˇcak, Eds. Springer International Publishing, 2017, pp. 97–117
work page 2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.