Fault-Tolerant, Rigidity-Preserving Control of Inflatable Truss Robots
Pith reviewed 2026-05-21 06:22 UTC · model grok-4.3
The pith
A fault-tolerant control framework for inflatable truss robots keeps structural rigidity and most of the workspace after motor failures.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By imposing equality constraints that exclude failed actuators from the kinematic optimization and by adding discrete-time control barrier function constraints that enforce rigidity at each time step, the framework mathematically guarantees that the truss remains rigid while maximizing usable workspace. Closed-loop position control using a forward-kinematics state estimator then improves tracking accuracy by more than 25 percent under disturbances, as shown in both simulation and hardware on a 2D isoperimetric truss with six actuators.
What carries the argument
Discrete-time control barrier function (DTCBF) constraints that enforce rigidity at every discrete step while maximizing workspace, combined with equality constraints that disable failed actuators inside the kinematic optimizer.
If this is right
- Any combination of known motor failures can be handled by adding the matching equality constraints and re-solving the same optimization.
- Rigidity is guaranteed at every discrete time step rather than only in the continuous-time limit.
- Closed-loop encoder feedback improves accuracy without weakening the rigidity or workspace guarantees.
- The same constraint-based approach applies to both simulation and onboard hardware control of the 2D truss.
Where Pith is reading between the lines
- If the method extends to three-dimensional trusses, it could support larger deployable structures that remain operational after partial actuator loss.
- Similar discrete-time barrier techniques could protect geometric properties in other reconfigurable robots that lose actuators mid-task.
- Experiments that deliberately introduce two or more simultaneous failures would show how quickly workspace shrinks with increasing fault count.
Load-bearing premise
The kinematic model and the chosen rigidity conditions remain accurate when motors fail and when the controller runs at the assumed discrete sampling rate.
What would settle it
A hardware test in which the truss visibly loses rigidity or retains less than 69 percent workspace after a single documented motor failure would show that the guarantees do not hold under the stated conditions.
Figures







read the original abstract
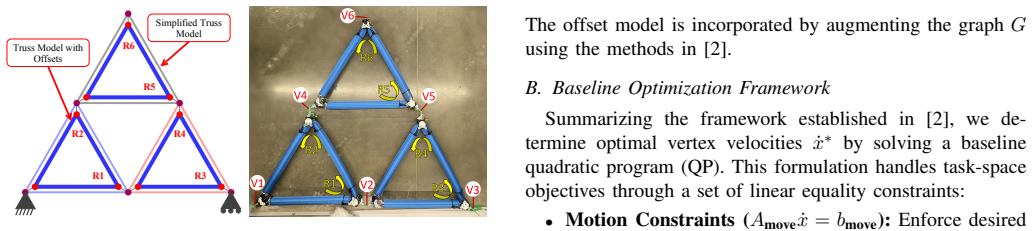
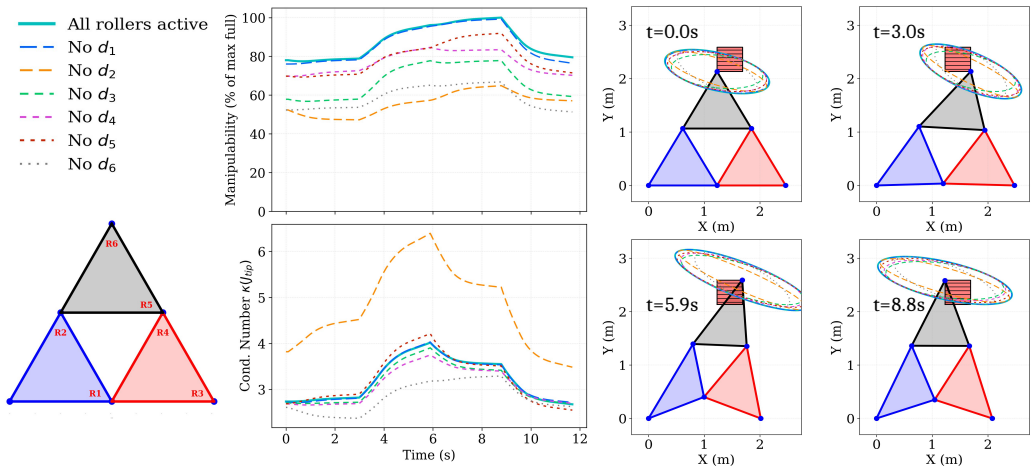
Isoperimetric robotic trusses can adapt to different tasks and environments because they have a high strength-to-weight ratio, can change their own shape dramatically, and can be reconfigured into a variety of different shapes. However, motor failures in operational environments can severely limit operational capabilities if not properly addressed. This paper presents a fault-tolerant control framework for an inflatable robotic truss that maintains functionality despite motor failures, shown through three key contributions. First, we extend the kinematic optimization to handle arbitrary combinations of motor failures by imposing equality constraints to ensure failed actuators are not used. Second, we introduce discrete-time control barrier function (DTCBF) constraints that mathematically guarantee structural rigidity while maximizing workspace utilization, a critical requirement for reliable operation of truss robots under discrete-time control. Third, we implement closed-loop position control using onboard encoder feedback and a forward kinematics-based state estimator, improving positional accuracy in the presence of disturbances. We validate our approach through simulation and hardware experiments on a 2D isoperimetric truss testbed. For a 2D configuration with 6 actuators, we demonstrate >69% workspace preservation under single-motor failures and a >25% improvement in tracking accuracy with closed-loop control. These results establish a foundation for more robust and resilient isoperimetric truss robots operating under degraded actuation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a fault-tolerant control framework for inflatable truss robots. It extends kinematic optimization by adding equality constraints to disable failed actuators, introduces discrete-time control barrier function (DTCBF) constraints claimed to mathematically guarantee structural rigidity while maximizing workspace, and adds closed-loop position control using onboard encoder feedback and forward kinematics estimation. Validation via simulation and hardware experiments on a 2D 6-actuator testbed reports >69% workspace preservation under single-motor failures and >25% improvement in tracking accuracy with closed-loop control.
Significance. If the DTCBF rigidity guarantees are shown to hold under the discrete-time sampling and failure-mode equality constraints, the framework would offer a principled way to maintain truss integrity despite actuator loss, which is valuable for reliable deployment of lightweight, reconfigurable robots. The hardware results on workspace preservation provide concrete evidence of practical utility beyond simulation.
major comments (1)
- [DTCBF formulation and kinematic optimization extension] The central claim that DTCBF constraints 'mathematically guarantee structural rigidity' (abstract and DTCBF section) does not include an explicit discretization error bound, a proof that the added equality constraints for failed actuators preserve the discrete invariance condition (class-K function and sampling period h), or verification that the rigidity matrix remains positive definite under single-motor failures at the chosen sampling rate. Without these, the guarantee does not necessarily transfer from continuous to discrete time, making the >69% workspace figure an empirical observation rather than a direct consequence of the DTCBF.
minor comments (2)
- [Experimental setup] Clarify the exact sampling period h used in the DTCBF implementation and how it was selected relative to the system dynamics.
- [Closed-loop control implementation] Provide more detail on the state estimator's accuracy under failure conditions and any assumptions about known vs. unknown failures.
Simulated Author's Rebuttal
We thank the referee for their detailed and constructive comments on our manuscript. We address the major comment below and have revised the paper to strengthen the presentation of the DTCBF guarantees.
read point-by-point responses
-
Referee: [DTCBF formulation and kinematic optimization extension] The central claim that DTCBF constraints 'mathematically guarantee structural rigidity' (abstract and DTCBF section) does not include an explicit discretization error bound, a proof that the added equality constraints for failed actuators preserve the discrete invariance condition (class-K function and sampling period h), or verification that the rigidity matrix remains positive definite under single-motor failures at the chosen sampling rate. Without these, the guarantee does not necessarily transfer from continuous to discrete time, making the >69% workspace figure an empirical observation rather than a direct consequence of the DTCBF.
Authors: We appreciate the referee highlighting these aspects required for a complete discrete-time guarantee. We agree that the original manuscript would benefit from explicit treatment of the discretization. In the revised version, we add an explicit discretization error bound derived from the Lipschitz continuity of the closed-loop dynamics and the sampling period. We also include a proof that the equality constraints imposed by failed actuators preserve the discrete invariance condition for the chosen class-K function. Finally, we verify via eigenvalue analysis that the rigidity matrix remains positive definite under all single-motor failure modes at the operating sampling rate. These additions make the rigidity guarantee a direct consequence of the DTCBF formulation rather than solely empirical, while the reported workspace figures remain supported by both theory and experiment. revision: yes
Circularity Check
No significant circularity; standard methods extended independently
full rationale
The paper extends kinematic optimization with equality constraints for actuator failures and introduces DTCBF constraints for rigidity preservation, drawing from established control theory without reducing the central claims to self-referential fits or definitions. Performance metrics are reported from simulation and hardware experiments on the 2D testbed rather than predictions forced by construction from the inputs. No load-bearing self-citations, ansatz smuggling, or uniqueness theorems imported from the authors' prior work are evident in the derivation chain. The framework remains self-contained against external benchmarks in CBF and optimization literature.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The truss structure remains kinematically rigid when failed actuators are excluded via equality constraints.
- domain assumption Discrete-time control barrier functions can enforce structural rigidity while maximizing workspace under sampled control.
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
we introduce discrete-time control barrier function (DTCBF) constraints that mathematically guarantee structural rigidity while maximizing workspace utilization
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
extend the kinematic optimization to handle arbitrary combinations of motor failures by imposing equality constraints
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Modular isoperimetric soft robotic truss for lunar applications,
M. Stanciu, I. Weaver, A. Rose, J. Wade, K. Paxton, C. Paul, S. Stowell, and N. Usevitch, “Modular isoperimetric soft robotic truss for lunar applications,”arXiv preprint arXiv:2602.02915, 2026
-
[2]
An untethered isoperimetric soft robot,
N. S. Usevitch, Z. M. Hammond, M. Schwager, A. M. Okamura, E. W. Hawkes, and S. Follmer, “An untethered isoperimetric soft robot,” Science Robotics, vol. 5, no. 40, 2020
work page 2020
-
[3]
100-m scale tetrahedral truss structures made from lht-1 lunar regolith simulant feedstock,
B. Nunan, J. Corbin, Z. Arzt, J. Seymour, R. Wainner, C. Hessel, P. Warren, and M. Stern, “100-m scale tetrahedral truss structures made from lht-1 lunar regolith simulant feedstock,” inAIAA SCITECH, 2024
work page 2024
-
[4]
Deployable controllable geometry truss beam,
M. D. Rhodes and M. M. Mikulas Jr, “Deployable controllable geometry truss beam,” Tech. Rep., 1985
work page 1985
-
[5]
Variable geometry truss and its application to deployable truss and space crane arm,
K. Miura, H. Furuya, and K. Suzuki, “Variable geometry truss and its application to deployable truss and space crane arm,” Acta Astronautica, vol. 12, no. 7, pp. 599–607, 1985, congress of the International Federation of Astronautics. [Online]. Available: https://www.sciencedirect.com/science/article/pii/0094576585901316
-
[6]
Variable topology truss: Design and analysis,
A. Spinos, D. Carroll, T. Kientz, and M. Yim, “Variable topology truss: Design and analysis,” in2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2017, pp. 2717–2722
work page 2017
-
[7]
Design and control of tensegrity robots for locomotion,
C. Paul, F. Valero-Cuevas, and H. Lipson, “Design and control of tensegrity robots for locomotion,”IEEE Transactions on Robotics, vol. 22, no. 5, pp. 944–957, 2006
work page 2006
-
[8]
Trussbot: Modeling, design, and control of a compliant, helical truss of tetrahedral modules,
Y . Qin, L. Ting, C. Saven, Y . Amemiya, M. Tanis, R. D. Kamien, and C. Sung, “Trussbot: Modeling, design, and control of a compliant, helical truss of tetrahedral modules,” in2022 International Conference on Robotics and Automation (ICRA). IEEE, 2022, pp. 4218–4224
work page 2022
-
[9]
Redundancy resolution through local optimization: A review,
D. N. Nenchev, “Redundancy resolution through local optimization: A review,”Journal of robotic systems, vol. 6, no. 6, pp. 769–798, 1989
work page 1989
-
[10]
Kinematic control of redundant robot manipulators: A tutorial,
B. Siciliano, “Kinematic control of redundant robot manipulators: A tutorial,”Journal of intelligent and robotic systems, vol. 3, no. 3, pp. 201–212, 1990
work page 1990
-
[11]
Fault tolerant operation of kinematically redundant manipulators for locked joint failures,
C. L. Lewis and A. A. Maciejewski, “Fault tolerant operation of kinematically redundant manipulators for locked joint failures,”IEEE Transactions on Robotics and Automation, vol. 13, no. 4, pp. 622–629, 2002
work page 2002
-
[12]
Stabilisation of infinitesimally rigid formations of multi-robot networks,
L. Krick, M. E. Broucke, and B. A. F. and, “Stabilisation of infinitesimally rigid formations of multi-robot networks,”International Journal of Control, vol. 82, no. 3, pp. 423–439, 2009. [Online]. Available: https://doi.org/10.1080/00207170802108441
-
[13]
Rigid graph control architectures for autonomous formations,
B. D. Anderson, C. Yu, B. Fidan, and J. M. Hendrickx, “Rigid graph control architectures for autonomous formations,”IEEE Control Systems Magazine, vol. 28, no. 6, pp. 48–63, 2008
work page 2008
-
[14]
Robotic swarm motion planning for load carrying and manipulating,
O. Medina, S. Hacohen, and N. Shvalb, “Robotic swarm motion planning for load carrying and manipulating,”IEEE Access, vol. 8, pp. 53 141–53 150, 2020
work page 2020
-
[15]
A modal approach to hyper- redundant manipulator kinematics,
G. S. Chirikjian and J. W. Burdick, “A modal approach to hyper- redundant manipulator kinematics,”IEEE Transactions on Robotics and Automation, vol. 10, no. 3, pp. 343–354, 2002
work page 2002
-
[16]
Kinematics for multisection continuum robots,
B. A. Jones and I. D. Walker, “Kinematics for multisection continuum robots,”IEEE transactions on robotics, vol. 22, no. 1, pp. 43–55, 2006
work page 2006
-
[17]
Control barrier functions: Theory and applications,
A. D. Ames, S. Coogan, M. Egerstedt, G. Notomista, K. Sreenath, and P. Tabuada, “Control barrier functions: Theory and applications,” in2019 18th European control conference (ECC). IEEE, 2019, pp. 3420–3431
work page 2019
-
[18]
A. Agrawal and K. Sreenath, “Discrete control barrier functions for safety-critical control of discrete systems with application to bipedal robot navigation,” inRobotics: Science and Systems, 2017
work page 2017
-
[19]
Safety-critical model predictive control with discrete-time control barrier function,
J. Zeng, B. Zhang, and K. Sreenath, “Safety-critical model predictive control with discrete-time control barrier function,” in2021 American Control Conference (ACC). IEEE, 2021, pp. 3882–3889
work page 2021
-
[20]
Discrete- time control barrier functions for safety-critical control,
J. Buch, S.-C. Liao, K. Black, I. Kolmanovsky, and A. Girard, “Discrete- time control barrier functions for safety-critical control,”IEEE Control Systems Letters, vol. 7, pp. 1642–1647, 2023
work page 2023
-
[21]
Rigidity maintenance control for multi-robot systems,
D. Zelazo, A. Franchi, F. Allg ¨ower, H. H. B ¨ulthoff, and P. R. Giordano, “Rigidity maintenance control for multi-robot systems,”Robotics: Sci- ence and Systems, pp. 473–480, 2012
work page 2012
-
[22]
N. Usevitch, Z. Hammond, S. Follmer, and M. Schwager, “Linear actuator robots: Differential kinematics, controllability, and algorithms for locomotion and shape morphing,” in2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2017, pp. 5361–5367
work page 2017
-
[23]
Triangle-decomposable graphs for isoperimetric robots,
N. Usevitch, I. Weaver, and J. Usevitch, “Triangle-decomposable graphs for isoperimetric robots,”IEEE Robotics and Automation Letters, vol. 10, no. 12, pp. 12 716–12 723, 2025
work page 2025
-
[24]
SciPy 1.0: Fundamental algorithms for scientific computing in python,
P. Virtanen, R. Gommers, T. E. Oliphantet al., “SciPy 1.0: Fundamental algorithms for scientific computing in python,”Nature Methods, vol. 17, pp. 261–272, 2020
work page 2020
-
[25]
A software package for sequential quadratic programming,
D. Kraft, “A software package for sequential quadratic programming,” DFVLR German Aerospace Center, Tech. Rep. DFVLR-FB 88-28, 1988
work page 1988
-
[26]
Manipulability of robotic mechanisms,
T. Yoshikawa, “Manipulability of robotic mechanisms,”The Interna- tional Journal of Robotics Research, vol. 4, no. 2, pp. 3–9, 1985
work page 1985
-
[27]
Articulated hands: Force control and kinematic issues,
J. K. Salisbury and J. J. Craig, “Articulated hands: Force control and kinematic issues,”The International journal of Robotics research, vol. 1, no. 1, pp. 4–17, 1982
work page 1982
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.