ShapeBench: A Scalable Benchmark and Diagnostic Suite for Standardized Evaluation in Aerodynamic Shape Optimization
Pith reviewed 2026-05-21 06:29 UTC · model grok-4.3
The pith
A new benchmark for aerodynamic shape optimization reveals that optimizer performance rankings change dramatically across different shape categories and problem types.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
ShapeBench is an open-source benchmark with a unified API for 103 aerodynamic shape optimization tasks spanning eight shape categories and multiple regimes. Each task comes with a validated surrogate model for fast optimization and, where possible, a CFD pipeline for verification. Using a consistent budget metric, comparisons of classical optimizers and LLM-driven methods, including the new ShapeEvolve baseline, show substantial variance in rankings with a mean pairwise Spearman correlation of only 0.013. This indicates that single-task results do not generalize reliably across problem classes, and classical methods are not broadly applicable.
What carries the argument
ShapeBench, a scalable benchmark suite that standardizes tasks, provides surrogates for search, and uses a matched-budget protocol to enable fair comparisons across optimizers and shape classes.
Load-bearing premise
The surrogates used in the benchmark are accurate enough representations of the true optimization landscapes to make search results meaningful.
What would settle it
If a broad set of optimizers shows consistently similar ranking orders when evaluated across all eight shape categories using the same budget, that would contradict the observed variance.
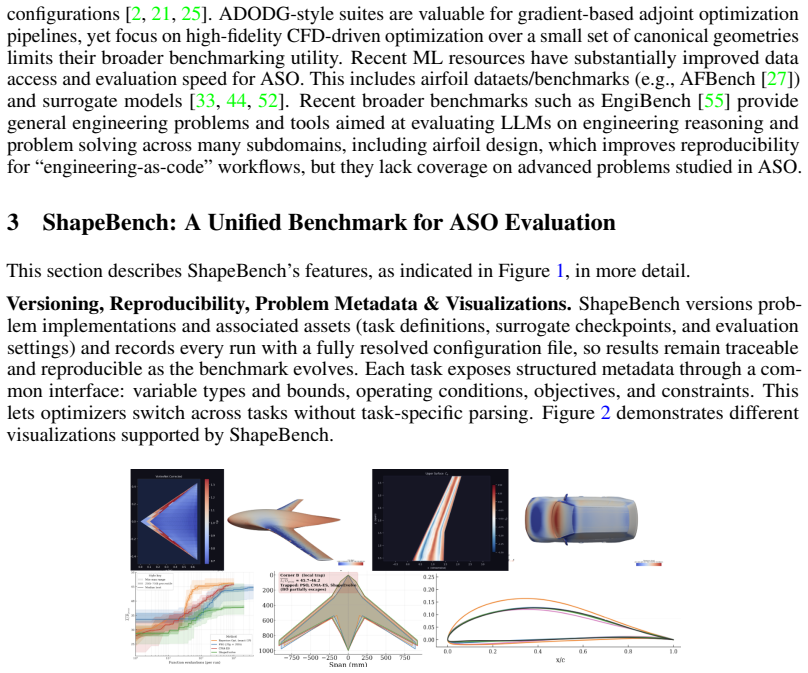
Figures









































read the original abstract
Rapid progress in aerodynamic shape optimization (ASO) has outpaced currently-available standardized evaluation frameworks. Fair comparison requires a unified benchmark spanning diverse shape classes, objective formulations, and matched-budget state-of-the-art baselines. We introduce ShapeBench, an open-source ASO benchmark with a unified API spanning 103 tasks across eight shape categories and multiple optimization regimes. Each ShapeBench task includes a validated surrogate for fast search; when feasible, a high-fidelity Computational Fluid Dynamics (CFD) pipeline for final verification is available, enabling systematic fidelity-gap analysis. ShapeBench provides a reproducible protocol with well-configured baselines to compare fairly using a consistent budget metric, allowing for comparison among both classical and LLM-driven methods, including general-purpose optimizers and a new domain-specialized evolutionary LLM baseline, ShapeEvolve. Results on ShapeBench demonstrate substantial variance in optimizer rankings across shape categories and problem formulations, with mean pairwise Spearman $\rho = 0.013$, so single-task conclusions do not reliably generalize across problem classes. The benchmark is also far from saturation; classical methods are rarely applicable across all shape categories and tasks, further highlighting the need for more general-purpose approaches.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces ShapeBench, an open-source benchmark for aerodynamic shape optimization (ASO) with a unified API spanning 103 tasks across eight shape categories and multiple optimization regimes. Each task supplies a validated surrogate for fast search and, when feasible, a high-fidelity CFD pipeline for verification and fidelity-gap analysis. The benchmark supplies reproducible protocols and matched-budget baselines that include both classical optimizers and LLM-driven methods, notably a new domain-specialized evolutionary LLM baseline (ShapeEvolve). The central empirical result is substantial variance in optimizer rankings across shape categories and problem formulations, quantified by a mean pairwise Spearman ρ of 0.013, from which the authors conclude that single-task conclusions do not reliably generalize.
Significance. If the surrogates are demonstrated to preserve relative optimizer rankings that would be obtained under high-fidelity CFD, ShapeBench would provide a much-needed standardized, scalable evaluation framework for ASO that enables fair comparison of classical and emerging LLM-based approaches. The public release, consistent budget metric, and explicit support for fidelity-gap studies are clear strengths. The reported low cross-task correlation usefully challenges the common practice of drawing broad conclusions from single-task experiments. The overall significance remains moderate until quantitative surrogate validation is supplied.
major comments (1)
- [Abstract] Abstract (paragraph on task structure and baselines): The central claim that observed ranking variance (mean pairwise Spearman ρ = 0.013) demonstrates failure of single-task conclusions to generalize rests on the assumption that surrogate error does not distort relative optimizer performance. The abstract states that surrogates are “validated” and that a CFD pipeline enables “systematic fidelity-gap analysis,” yet no quantitative validation statistics—RMSE, rank correlation with CFD on optimized designs, or per-category fidelity-gap tables—are reported. Without these, it remains possible that non-uniform approximation error across shape categories inflates the reported variance.
minor comments (1)
- [Abstract] Abstract: The phrase “mean pairwise Spearman ρ = 0.013” would benefit from an explicit statement of the exact set of optimizer pairs and tasks over which the mean is taken, and whether the value is computed on final performance or on the entire optimization trajectory.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive feedback. The concern about surrogate validation and its potential effect on the reported ranking variance is a substantive point that merits direct response. We address it below and outline planned revisions.
read point-by-point responses
-
Referee: The central claim that observed ranking variance (mean pairwise Spearman ρ = 0.013) demonstrates failure of single-task conclusions to generalize rests on the assumption that surrogate error does not distort relative optimizer performance. The abstract states that surrogates are “validated” and that a CFD pipeline enables “systematic fidelity-gap analysis,” yet no quantitative validation statistics—RMSE, rank correlation with CFD on optimized designs, or per-category fidelity-gap tables—are reported. Without these, it remains possible that non-uniform approximation error across shape categories inflates the reported variance.
Authors: We agree that the interpretation of the low mean pairwise Spearman ρ = 0.013 as evidence against generalizing from single tasks implicitly assumes that surrogate approximation error does not systematically alter relative optimizer rankings across categories. Each surrogate is trained on CFD-generated data and the benchmark supplies a high-fidelity CFD pipeline for verification on feasible tasks, but the current manuscript does not report explicit quantitative metrics (RMSE on held-out CFD points, rank correlation of final designs, or per-category fidelity-gap tables) that would directly test preservation of optimizer orderings. In the revised manuscript we will add a dedicated validation subsection containing these statistics on a representative subset of tasks, together with an updated abstract that references the new results. This addition will allow readers to evaluate the possible contribution of non-uniform surrogate error to the observed variance. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper introduces ShapeBench as an open benchmark with 103 tasks and reports an empirical finding of low mean pairwise Spearman ρ = 0.013 in optimizer rankings across categories. This statistic is obtained by running the listed baselines on the defined tasks and surrogates; it is a direct measurement rather than a quantity derived from prior inputs by construction, fitted parameter, or self-citation chain. No equations, uniqueness theorems, or ansatzes are invoked that reduce the central claim to the benchmark definition itself. The result is therefore self-contained as an observation on a publicly released resource.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Surrogates are validated and sufficiently accurate for optimization search; high-fidelity CFD is available for verification when feasible.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Results on ShapeBench demonstrate substantial variance in optimizer rankings across shape categories and problem formulations, with mean pairwise Spearman ρ = 0.013
-
IndisputableMonolith/Foundation/AlphaCoordinateFixation.leanJ_uniquely_calibrated_via_higher_derivative unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Each ShapeBench task includes a validated surrogate for fast search; when feasible, a high-fidelity Computational Fluid Dynamics (CFD) pipeline
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Nikhil Abhyankar, Sanchit Kabra, Saaketh Desai, and Chandan K Reddy. Accelerating materials design via llm-guided evolutionary search.arXiv preprint arXiv:2510.22503, 2025
-
[2]
Aerodynamic shape optimization benchmarks with error control and automatic parameterization
George R Anderson, Marian Nemec, and Michael J Aftosmis. Aerodynamic shape optimization benchmarks with error control and automatic parameterization. In53rd AIAA Aerospace Sciences Meeting, page 1719, 2015
work page 2015
-
[3]
Joel Andersson, Joris Gillis, Greg Horn, Jim Rawlings, and Moritz Diehl. Casadi—a soft- ware framework for nonlinear optimization and optimal control.Mathematical Programming Computation, 11(1):1–36, 2018
work page 2018
-
[4]
Neil Ashton, Charles Mockett, Marian Fuchs, Louis Fliessbach, Hendrik Hetmann, Thilo Knacke, Norbert Schonwald, Vangelis Skaperdas, Grigoris Fotiadis, Astrid Walle, et al. Dri- vAerML: High-fidelity computational fluid dynamics dataset for road-car external aerodynamics. arXiv preprint arXiv:2408.11969, 2024
-
[5]
Botorch: A framework for efficient monte-carlo bayesian optimization
Maximilian Balandat, Brian Karrer, Daniel Jiang, Samuel Daulton, Ben Letham, Andrew G Wil- son, and Eytan Bakshy. Botorch: A framework for efficient monte-carlo bayesian optimization. Advances in neural information processing systems, 33:21524–21538, 2020
work page 2020
-
[6]
Jennifer Dacles-Mariani, Gregory G. Zilliac, Jim S. Chow, and Peter Bradshaw. Numerical/- experimental study of a wingtip vortex in the near field.AIAA Journal, 33(9):1561–1568, 1995
work page 1995
-
[7]
From fast to fast-oad: An open source framework for rapid overall aircraft design
Christophe David, Scott Delbecq, Sebastien Defoort, Peter Schmollgruber, Emmanuel Benard, and Valerie Pommier-Budinger. From fast to fast-oad: An open source framework for rapid overall aircraft design. InIOP Conference Series: Materials Science and Engineering, volume 1024, page 012062. IOP Publishing, 2021
work page 2021
-
[8]
An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale
Alexey Dosovitskiy, Lucas Beyer, Alexander Kolesnikov, Dirk Weissenborn, Xiaohua Zhai, Thomas Unterthiner, Mostafa Dehghani, Matthias Minderer, Georg Heigold, Sylvain Gelly, et al. An image is worth 16x16 words: Transformers for image recognition at scale.arXiv preprint arXiv:2010.11929, 2020
work page internal anchor Pith review Pith/arXiv arXiv 2010
-
[9]
Pros & cons of airfoil optimization
Mark Drela. Pros & cons of airfoil optimization. InFrontiers of Computational Fluid Dynamics 1998, pages 363–381. World Scientific, 1998
work page 1998
-
[10]
Mohamed Elrefaie, Florin Morar, Angela Dai, and Faez Ahmed. Drivaernet++: A large- scale multimodal car dataset with computational fluid dynamics simulations and deep learning benchmarks, 2025
work page 2025
-
[11]
Alexander Forrester, Andras Sobester, and Andy Keane.Engineering design via surrogate modelling: a practical guide. John Wiley & Sons, 2008
work page 2008
-
[12]
A Tutorial on Bayesian Optimization
Peter I Frazier. A tutorial on bayesian optimization.arXiv preprint arXiv:1807.02811, 2018
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[13]
KC Giannakoglou. Design of optimal aerodynamic shapes using stochastic optimization methods and computational intelligence.Progress in Aerospace sciences, 38(1):43–76, 2002
work page 2002
-
[14]
Michael B Giles and Niles A Pierce. An introduction to the adjoint approach to design.Flow, turbulence and combustion, 65(3):393–415, 2000
work page 2000
-
[15]
Nikolaus Hansen, Youhei Akimoto, and Petr Baudis. Cma-es/pycma on github, 2019. 10
work page 2019
-
[16]
Nikolaus Hansen, Anne Auger, Raymond Ros, Olaf Mersmann, Tea Tušar, and Dimo Brockhoff. Coco: A platform for comparing continuous optimizers in a black-box setting.Optimization Methods and Software, 36(1):114–144, 2021
work page 2021
-
[17]
Nikolaus Hansen and Andreas Ostermeier. Completely derandomized self-adaptation in evolu- tion strategies.Evolutionary computation, 9(2):159–195, 2001
work page 2001
-
[18]
Robert Hooke and Terry A Jeeves. “direct search”solution of numerical and statistical problems. Journal of the ACM (JACM), 8(2):212–229, 1961
work page 1961
-
[19]
Aerodynamic design via control theory.Journal of scientific computing, 3(3):233–260, 1988
Antony Jameson. Aerodynamic design via control theory.Journal of scientific computing, 3(3):233–260, 1988
work page 1988
-
[20]
James Kennedy and Russell Eberhart. Particle swarm optimization. InProceedings of ICNN’95- international conference on neural networks, volume 4, pages 1942–1948. ieee, 1995
work page 1942
-
[21]
Aerodynamic shape optimization of the crm configuration including buffet-onset conditions
Gaetan K Kenway and Joaquim RRA Martins. Aerodynamic shape optimization of the crm configuration including buffet-onset conditions. In54th AIAA Aerospace Sciences Meeting, page 1294, 2016
work page 2016
-
[22]
Adam: A Method for Stochastic Optimization
Diederik P Kingma and Jimmy Ba. Adam: A method for stochastic optimization.arXiv preprint arXiv:1412.6980, 2014
work page internal anchor Pith review Pith/arXiv arXiv 2014
-
[23]
Universal parametric geometry representation method.Journal of aircraft, 45(1):142–158, 2008
Brenda M Kulfan. Universal parametric geometry representation method.Journal of aircraft, 45(1):142–158, 2008
work page 2008
-
[24]
Shinkaevolve: Towards open-ended and sample-efficient program evolution, 2025
Robert Tjarko Lange, Yuki Imajuku, and Edoardo Cetin. Shinkaevolve: Towards open-ended and sample-efficient program evolution, 2025
work page 2025
-
[25]
Stephen T LeDoux, John C Vassberg, David P Young, Spencer Fugal, Dmitry Kamenetskiy, William P Huffman, Robin G Melvin, and Matthew F Smith. Study based on the aiaa aero- dynamic design optimization discussion group test cases.AIAA Journal, 53(7):1910–1935, 2015
work page 1910
-
[26]
Solving quantitative reasoning problems with language models, 2022
Aitor Lewkowycz, Anders Andreassen, David Dohan, Ethan Dyer, Henryk Michalewski, Vinay Ramasesh, Ambrose Slone, Cem Anil, Imanol Schlag, Theo Gutman-Solo, Yuhuai Wu, Behnam Neyshabur, Guy Gur-Ari, and Vedant Misra. Solving quantitative reasoning problems with language models, 2022
work page 2022
-
[27]
Afbench: A large-scale benchmark for airfoil design
Jian Liu, Jianyu Wu, Hairun Xie, Guoqing Zhang, Jing Wang, Wei Liu, Wanli Ouyang, Junjun Jiang, Xianming Liu, Shixiang Tang, et al. Afbench: A large-scale benchmark for airfoil design. Advances in Neural Information Processing Systems, 37:82757–82780, 2024
work page 2024
-
[28]
Decoupled Weight Decay Regularization
Ilya Loshchilov and Frank Hutter. Decoupled weight decay regularization.arXiv preprint arXiv:1711.05101, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[29]
Joaquim R.R.A. Martins and Andrew B. Lambe. Multidisciplinary design optimization: A survey of architectures.AIAA Journal, 51:2049–2075, 2013
work page 2049
-
[30]
MeshLib: Mesh Processing Library
MeshInspector. MeshLib: Mesh Processing Library. https://github.com/MeshInspector/ MeshLib, 2025. Version 3.0.9.196, accessed 2026-04-30
work page 2025
-
[31]
nTop Inc. ntop (release 4.1), 2025. Computational design software
work page 2025
-
[32]
Joelle Pineau, Philippe Vincent-Lamarre, Koustuv Sinha, Vincent Larivière, Alina Beygelzimer, Florence d’Alché Buc, Emily Fox, and Hugo Larochelle. Improving reproducibility in machine learning research (a report from the neurips 2019 reproducibility program), 2020
work page 2019
-
[33]
Jiyan Qiu, Lyulin Kuang, Guan Wang, Yichen Xu, Leiyao Cui, Shaotong Fu, Yixin Zhu, and Ruihua Zhang. Drivaerstar: An industrial-grade cfd dataset for vehicle aerodynamic optimization.arXiv preprint arXiv:2510.16857, 2025
-
[34]
Surrogate-based analysis and optimization.Progress in aerospace sciences, 41(1):1–28, 2005
Nestor V Queipo, Raphael T Haftka, Wei Shyy, Tushar Goel, Rajkumar Vaidyanathan, and P Kevin Tucker. Surrogate-based analysis and optimization.Progress in aerospace sciences, 41(1):1–28, 2005. 11
work page 2005
-
[35]
Mathematical discoveries from program search with large language models
Bernardino Romera-Paredes, Mohammadamin Barekatain, Alexander Novikov, Matej Balog, M Pawan Kumar, Emilien Dupont, Francisco JR Ruiz, Jordan S Ellenberg, Pengming Wang, Omar Fawzi, et al. Mathematical discoveries from program search with large language models. Nature, 625(7995):468–475, 2024
work page 2024
-
[36]
Evolution Strategies as a Scalable Alternative to Reinforcement Learning
Tim Salimans, Jonathan Ho, Xi Chen, Szymon Sidor, and Ilya Sutskever. Evolution strategies as a scalable alternative to reinforcement learning.arXiv preprint arXiv:1703.03864, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[37]
Marco Saporito, Andrea Da Ronch, Nathalie Bartoli, and Sébastien Defoort. Robust multidis- ciplinary analysis and optimization for conceptual design of flexible aircraft under dynamic aeroelastic constraints.Aerospace Science and Technology, 138:108349, 2023
work page 2023
-
[38]
Paul Saves, Nathalie Bartoli, Youssef Diouane, Thierry Lefebvre, Joseph Morlier, Christophe David, Eric Nguyen Van, and Sébastien Defoort. Bayesian optimization for mixed variables using an adaptive dimension reduction process: applications to aircraft design. InAIAA SciTech 2022 Forum, page 0082, 2022
work page 2022
-
[39]
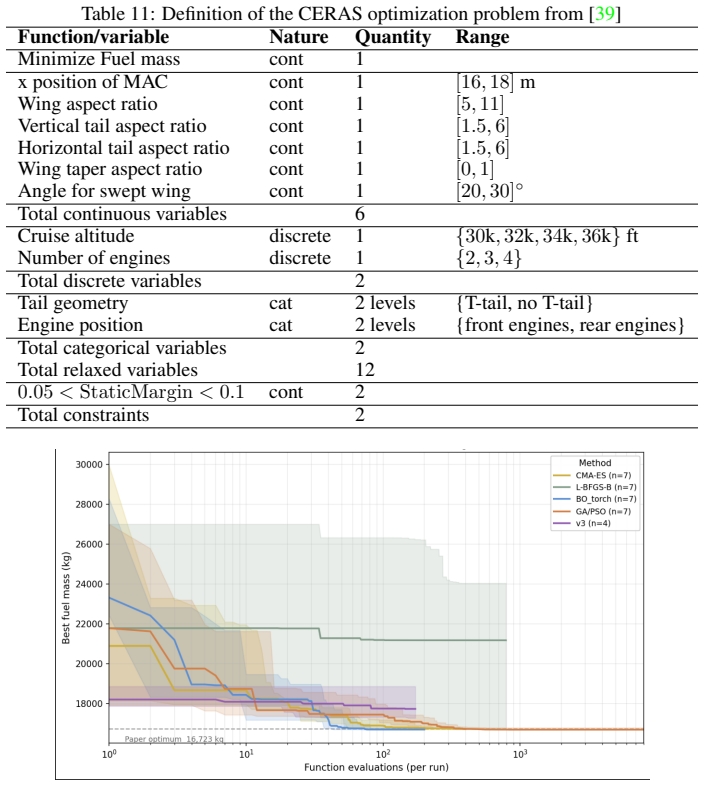
Multidisciplinary design optimization with mixed categorical variables for aircraft design
Paul Saves, Nathalie Bartoli, Youssef Diouane, Thierry Lefebvre, Joseph Morlier, Christophe David, Eric Nguyen Van, and Sébastien Defoort. Multidisciplinary design optimization with mixed categorical variables for aircraft design. InAIAA SCITECH 2022 Forum. American Institute of Aeronautics and Astronautics, January 2022
work page 2022
-
[40]
Openevolve: Open-source implementation of alphaevolve, 2025
Asankhaya Sharma. Openevolve: Open-source implementation of alphaevolve, 2025. Accessed: 2026-05-07
work page 2025
-
[41]
Peter Sharpe and R. John Hansman. Neuralfoil: An airfoil aerodynamics analysis tool using physics-informed machine learning, 2025
work page 2025
-
[42]
Peter D. Sharpe.Accelerating Practical Engineering Design Optimization with Computational Graph Transformations. PhD thesis, Massachusetts Institute of Technology, 2024
work page 2024
-
[43]
Peter D Sharpe and R John Hansman.Aerosandbox: A differentiable framework for aircraft design optimization. PhD thesis, 2021
work page 2021
-
[44]
Yiren Shen and Juan Alonso. Graph neural network-guided aerodynamic shape optimization for conceptual design of supersonic transport wings. InAIAA AVIATION FORUM AND ASCEND 2025, page 3228, 2025
work page 2025
-
[45]
V ortexnet: A graph neural network-based multi-fidelity surrogate model for field predictions
Yiren Shen, Jacob T Needels, and Juan J Alonso. V ortexnet: A graph neural network-based multi-fidelity surrogate model for field predictions. InAIAA SciTech 2025 Forum, page 0494, 2025
work page 2025
-
[46]
Nicholas Sung, Steven Spreizer, Mohamed Elrefaie, Matthew C. Jones, and Faez Ahmed. Blendednet++: A large-scale blended wing body aerodynamics dataset and benchmark, 2025
work page 2025
-
[47]
Nicholas Sung, Steven Spreizer, Mohamed Elrefaie, Kaira Samuel, Matthew C. Jones, and Faez Ahmed. Blendednet: A blended wing body aircraft dataset and surrogate model for aerodynamic predictions. InVolume 3B: 51st Design Automation Conference (DAC), IDETC- CIE2025. American Society of Mechanical Engineers, August 2025
work page 2025
-
[48]
Neural-solver-library: A library for advanced neural pde solvers
Tsinghua University Machine Learning Group (THUML). Neural-solver-library: A library for advanced neural pde solvers. https://github.com/thuml/Neural-Solver-Library, 2025. Last accessed: 2025-09-29
work page 2025
-
[49]
Andreas Wächter and Lorenz T Biegler. On the implementation of an interior-point filter line-search algorithm for large-scale nonlinear programming.Mathematical programming, 106(1):25–57, 2006
work page 2006
-
[50]
David H Wolpert and William G Macready. No free lunch theorems for optimization.IEEE transactions on evolutionary computation, 1(1):67–82, 2002
work page 2002
-
[51]
Transolver: A fast transformer solver for pdes on general geometries
Haixu Wu, Huakun Luo, Haowen Wang, Jianmin Wang, and Mingsheng Long. Transolver: A fast transformer solver for pdes on general geometries. InInternational Conference on Machine Learning, 2024. 12
work page 2024
-
[52]
Superwing: a comprehensive transonic wing dataset for data-driven aerodynamic design, 2025
Yunjia Yang, Weishao Tang, Mengxin Liu, Nils Thuerey, Yufei Zhang, and Haixin Chen. Superwing: a comprehensive transonic wing dataset for data-driven aerodynamic design, 2025
work page 2025
-
[53]
Using large language models for parametric shape opti- mization, 2024
Xinxin Zhang, Zhuoqun Xu, Guangpu Zhu, Chien Ming Jonathan Tay, Yongdong Cui, Boo Cheong Khoo, and Lailai Zhu. Using large language models for parametric shape opti- mization, 2024
work page 2024
-
[54]
MengChu Zhou, Meiji Cui, Dian Xu, Shuwei Zhu, Ziyan Zhao, and Abdullah Abusorrah. Evo- lutionary optimization methods for high-dimensional expensive problems: A survey.IEEE/CAA Journal of Automatica Sinica, 11(5):1092–1105, 2024
work page 2024
-
[55]
Engibench: A benchmark for evaluating large language models on engineering problem solving, 2025
Xiyuan Zhou, Xinlei Wang, Yirui He, Yang Wu, Ruixi Zou, Yuheng Cheng, Yulu Xie, Wenxuan Liu, Huan Zhao, Yan Xu, Jinjin Gu, and Junhua Zhao. Engibench: A benchmark for evaluating large language models on engineering problem solving, 2025
work page 2025
-
[56]
Ciyou Zhu, Richard H Byrd, Peihuang Lu, and Jorge Nocedal. Algorithm 778: L-bfgs-b: Fortran subroutines for large-scale bound-constrained optimization.ACM Transactions on mathematical software (TOMS), 23(4):550–560, 1997. 13 Appendix Table of Contents A More Information on This Project 16 A.1 Licenses . . . . . . . . . . . . . . . . . . . . . . . . . . . ...
work page 1997
-
[57]
Transolver [51] is a neural operator architecture and one of the models used within DrivAerStar
are the inclusion of vehicle features such as engine bays, cooling systems, and internal airflow as well as greater wind tunnel validation accuracy errors of ∼1 % compared to the >5 % typical values for the previous studies. Transolver [51] is a neural operator architecture and one of the models used within DrivAerStar. In validation tests, the Transolver...
-
[58]
FFD-based geometric morphing in Blender
-
[59]
Surrogate evaluation with Transolver 30 The surrogate achieves a total mean absolute percentage error (MAPE) of 2.422%, with per-style MAPEs of2.633% for E,2.195% for F, and2.437% for N. C.4NeuralFoil NeuralFoil [41, 42], when combined with the extension AeroSandbox, is a surrogate tool for rapid analysis of airfoils that can provide the aerodynamics for ...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.