6G Communication Networks Enabling Embodied Agents: Architecture and Prototype
Pith reviewed 2026-05-25 04:27 UTC · model grok-4.3
The pith
A four-layer architecture lets 6G networks support remote human-robot interaction with millisecond latency.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
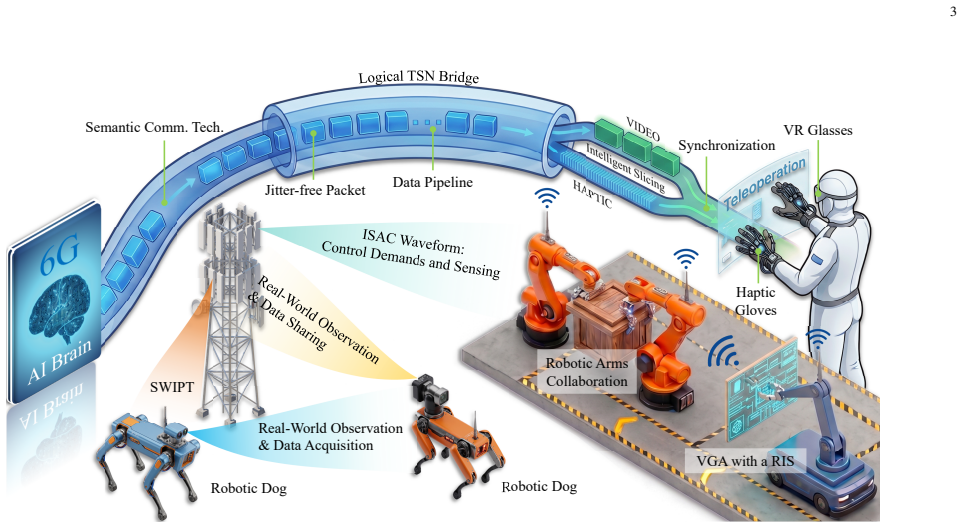
Embodied agents impose heterogeneous and stringent communication demands that 6G networks can address through a hierarchical architecture of four layers: a human-intent perception layer, an O-RAN-based transport layer, an intelligent intermediary layer, and an embodiment layer. The authors implement an end-to-end prototype using a haptic device, industrial robotic arm, intermediary platform, and 5G O-RAN testbed, which achieves millisecond-level latency and stable closed-loop operation, thereby confirming the architecture's practicality for future 6G deployments.
What carries the argument
The four-layer hierarchical communication architecture that separates human-intent perception, O-RAN transport, intelligent intermediary processing, and physical embodiment to meet embodied-agent requirements.
If this is right
- 6G enablers such as sub-millisecond latency and native intelligence can directly satisfy the communication needs of human-robot remote interaction.
- Embodied agents can in turn improve network performance by extending coverage, providing environmental sensing, and adding physical-world understanding.
- The demonstrated prototype supplies a concrete reference design for industrial and research deployments of 6G-enabled embodied systems.
- The architecture supports stable operation even when intent must cross from human perception to robotic actuation in real time.
Where Pith is reading between the lines
- The same layered separation could be adapted to other physical agents such as autonomous vehicles or wearable exoskeletons that also require tight human-machine loops.
- Once real 6G hardware exists, repeating the prototype test would show whether the added sensing and intelligence layers produce measurable gains over the 5G baseline.
- If the intermediary layer can be made fully distributed, the architecture might reduce single points of failure in large-scale robot fleets.
Load-bearing premise
Results from a current 5G O-RAN testbed can stand in for the performance and sensing capabilities that future 6G networks will actually deliver.
What would settle it
A measurement on the prototype or a follow-on test that shows latency or reliability falling outside the range needed for stable closed-loop robot control when 6G-specific sensing or intelligence features are added or removed.
Figures



read the original abstract
Embodied agents, which couple intelligent decision-making with physical actuation in the real world, impose far more stringent and heterogeneous communication requirements than purely software-based agents. While 6G promises sub-millisecond latency, ultra-high reliability, native intelligence, and integrated sensing, systematic studies on how to exploit these capabilities for embodied agent communication remain limited. This article investigates 6G-enabled communication systems for embodied agents from both conceptual and engineering perspectives. First, we review the concept, embodiment value of embodied agents, and clarify their distinctions from disembodied agents. Then, we analyse the symbiotic relationship between embodied agents and 6G networks. We highlight how key 6G enablers can support the stringent requirements of human-robot interaction. Furthermore, we demonstrate the proactive role of embodied agents in bolstering communication networks through coverage extension, environmental sensing, and physical world understanding. Building on these insights, we propose a hierarchical communication architecture for human-robot remote interaction, comprising a human-intent perception layer, an open radio access network (O-RAN)-based transport layer, an intelligent intermediary layer, and an embodiment layer. To validate its feasibility, we implement an end-to-end prototype that integrates a haptic device, an industrial robotic arm, an intermediary platform, and a 5G O-RAN testbed. Experimental results demonstrate millisecond-level latency and stable closed-loop operation, confirming the practicality of the proposed architecture and providing a reference for future 6G-embodied agent research and industrial deployments.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper reviews embodied agents and their distinctions from disembodied agents, analyzes the symbiotic relationship between embodied agents and 6G networks (including how 6G enablers like sub-ms latency, native intelligence, and integrated sensing support human-robot interaction requirements, and how agents can enhance networks via sensing and coverage), proposes a four-layer hierarchical architecture (human-intent perception layer, O-RAN-based transport layer, intelligent intermediary layer, embodiment layer) for remote interaction, and validates feasibility with an end-to-end 5G O-RAN prototype (haptic device + industrial robotic arm + intermediary + 5G testbed) that achieves millisecond-level latency and stable closed-loop operation.
Significance. If the central validation claim holds after addressing the 5G-to-6G gap, the work would offer a useful conceptual framework linking 6G capabilities to embodied systems and an initial engineering reference for remote human-robot setups, with potential to guide future deployments in robotics and wireless networks.
major comments (2)
- [Abstract] Abstract: the claim that the 5G O-RAN prototype 'confirm[s] the practicality of the proposed architecture' (a 6G architecture relying on sub-millisecond latency, ISAC, and native intelligence) is not supported by the reported results, which only demonstrate current 5G feasibility; the testbed description provides no evidence of emulating or incorporating 6G-specific features, making the inference from 5G metrics to 6G practicality a load-bearing gap.
- [Prototype validation section] Section on prototype validation (near end of manuscript): the experimental setup integrates a 5G testbed but the architecture section emphasizes 6G enablers; without additional analysis or emulation showing how the four-layer design would exploit or require those 6G features (e.g., integrated sensing for embodiment layer), the stable closed-loop results do not confirm the 6G-specific practicality asserted in the introduction and conclusion.
minor comments (1)
- [Abstract] The abstract and introduction use 'millisecond-level latency' without specifying measured values, variance, or comparison to baselines; adding quantitative details (e.g., mean latency and jitter from the haptic-arm loop) would improve clarity.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. The comments correctly identify that the prototype validation uses a 5G testbed and does not directly demonstrate 6G-specific capabilities. We address each point below and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that the 5G O-RAN prototype 'confirm[s] the practicality of the proposed architecture' (a 6G architecture relying on sub-millisecond latency, ISAC, and native intelligence) is not supported by the reported results, which only demonstrate current 5G feasibility; the testbed description provides no evidence of emulating or incorporating 6G-specific features, making the inference from 5G metrics to 6G practicality a load-bearing gap.
Authors: We agree that the abstract overstates the direct confirmation of 6G practicality. The prototype demonstrates millisecond-level latency and stable closed-loop control on a 5G O-RAN testbed, validating the core four-layer hierarchy (human-intent perception, O-RAN transport, intelligent intermediary, embodiment) under current network conditions. We will revise the abstract to state that the results confirm feasibility of the architecture using 5G technology as a practical baseline and reference for future 6G implementations, rather than claiming direct confirmation of 6G-specific features. We will also add a brief forward-looking sentence on how the layers map to 6G enablers. revision: yes
-
Referee: [Prototype validation section] Section on prototype validation (near end of manuscript): the experimental setup integrates a 5G testbed but the architecture section emphasizes 6G enablers; without additional analysis or emulation showing how the four-layer design would exploit or require those 6G features (e.g., integrated sensing for embodiment layer), the stable closed-loop results do not confirm the 6G-specific practicality asserted in the introduction and conclusion.
Authors: This observation is accurate. The reported experiments use 5G hardware and do not emulate sub-ms latency, ISAC, or native intelligence. We will revise the prototype section to explicitly qualify the 5G implementation, add a short analysis paragraph mapping each architecture layer to anticipated 6G capabilities (e.g., how integrated sensing could enhance the embodiment layer), and adjust the introduction and conclusion to frame the prototype as an initial engineering reference rather than a direct 6G validation. These changes will be made without altering the experimental data. revision: yes
Circularity Check
No circularity: conceptual proposal validated by independent prototype
full rationale
The paper contains no equations, fitted parameters, or derivations. It proposes a four-layer architecture conceptually and reports empirical results from a 5G O-RAN prototype (haptic device + robotic arm). No step reduces a claimed prediction or result to its own inputs by construction, self-definition, or self-citation chain. The 5G-to-6G extrapolation is an external modeling assumption, not a circular reduction within the paper's logic. The derivation chain is self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
From Large AI Models to Agentic AI: A Tutorial on Future Intelligent Communications,
F. Jiang, C. Pan, K. Wang, P. Michiardi, O. A. Dobre, and M. Debbah, “From Large AI Models to Agentic AI: A Tutorial on Future Intelligent Communications,”IEEE Journal on Selected Areas in Communications, vol. 44, pp. 3507–3540, 2026
work page 2026
-
[2]
F. Jiang, C. Pan, L. Dong, K. Wang, M. Debbah, D. Niyato, and Z. Han, “A Comprehensive Survey of Large AI Models for Future Communications: Foundations, Applications, and Challenges,”IEEE Communications Surveys & Tutorials, vol. 28, pp. 4731–4764, 2026
work page 2026
-
[3]
A New Agent-Based Intelligent Network Architecture,
S. T. Arzo, D. Scotece, R. Bassoli, F. Granelli, L. Foschini, and F. H. Fitzek, “A New Agent-Based Intelligent Network Architecture,”IEEE Communications Standards Magazine, vol. 6, no. 4, pp. 74–79, 2022
work page 2022
-
[4]
Large Language Model Enhanced Multi-Agent Systems for 6G Communications,
F. Jiang, Y . Peng, L. Dong, K. Wang, K. Yang, C. Pan, D. Niyato, and O. A. Dobre, “Large Language Model Enhanced Multi-Agent Systems for 6G Communications,”IEEE Wireless Communications, vol. 31, no. 6, pp. 48–55, 2024
work page 2024
-
[5]
When Large Language Model Agents Meet 6G Networks: Perception, Grounding, and Alignment,
M. Xu, D. Niyato, J. Kang, Z. Xiong, S. Mao, Z. Han, D. I. Kim, and K. B. Letaief, “When Large Language Model Agents Meet 6G Networks: Perception, Grounding, and Alignment,”IEEE Wireless Com- munications, vol. 31, no. 6, pp. 63–71, 2024
work page 2024
-
[6]
Toward Agentic AI Networking in 6G: A Generative Foundation Model-as-Agent Approach,
Y . Xiao, G. Shi, and P. Zhang, “Toward Agentic AI Networking in 6G: A Generative Foundation Model-as-Agent Approach,”IEEE Communications Magazine, vol. 63, no. 9, pp. 68–74, 2025
work page 2025
-
[7]
AI Embodiment Through 6G: Shaping the Future of AGI,
L. Bariah and M. Debbah, “AI Embodiment Through 6G: Shaping the Future of AGI,”IEEE Wireless Communications, vol. 31, no. 5, pp. 174–181, 2024
work page 2024
-
[8]
Embodied AI Agents: Modeling the World,
P. Fung, Y . Bachrach, A. Celikyilmaz, K. Chaudhuri, D. Chen, W. Chung, E. Dupoux, H. Gong, H. J ´egou, A. Lazaric, A. Majumdar, A. Madotto, F. Meier, F. Metze, L.-P. Morency, T. Moutakanni, J. Pino, B. Terver, J. Tighe, P. Tomasello, and J. Malik, “Embodied AI Agents: Modeling the World,”arXiv e-prints, p. arXiv:2506.22355, Jun. 2025
-
[9]
Pitfalls of Embodiment in Human-Agent Experiment Design,
J. Hale, L. Schweitzer, and J. Gratch, “Pitfalls of Embodiment in Human-Agent Experiment Design,” inProceedings of the 24th ACM International Conference on Intelligent Virtual Agents, ser. IV A ’24. New York, NY , USA: Association for Computing Machinery, 2024. [Online]. Available: https://doi.org/10.1145/3652988.3673958
-
[10]
Toward Artificial Intelligence-Native 6G Services [Mobile Radio],
B. C. Jung, “Toward Artificial Intelligence-Native 6G Services [Mobile Radio],”IEEE Vehicular Technology Magazine, vol. 19, no. 4, pp. 9–14, 2024
work page 2024
-
[11]
A. M. Ibrahim, R. Nordin, Y . S. M. Khamayseh, A. Amphawan, and M. Basheer Jasser, “URLLC for 6G Enabled Industry 5.0: A Taxonomy of Architectures, Cross Layer Techniques, and Time Critical Applications,”arXiv e-prints, p. arXiv:2510.08080, Oct. 2025
-
[12]
On the Road to 6G: Visions, Requirements, Key Technologies, and Testbeds,
C.-X. Wang, X. You, X. Gao, X. Zhu, Z. Li, C. Zhang, H. Wang, Y . Huang, Y . Chen, H. Haas, J. S. Thompson, E. G. Larsson, M. D. Renzo, W. Tong, P. Zhu, X. Shen, H. V . Poor, and L. Hanzo, “On the Road to 6G: Visions, Requirements, Key Technologies, and Testbeds,” IEEE Communications Surveys & Tutorials, vol. 25, no. 2, pp. 905–974, 2023
work page 2023
-
[13]
K. Zanbouri, M. Noor-A-Rahim, J. John, C. J. Sreenan, H. Vincent Poor, and D. Pesch, “A Comprehensive Survey of Wireless Time-Sensitive Networking (TSN): Architecture, Technologies, Applications, and Open Issues,”IEEE Communications Surveys & Tutorials, vol. 27, no. 4, pp. 2129–2155, 2025
work page 2025
-
[14]
Artificial General Intelligence (AGI)-Native Wireless Systems: A Journey Beyond 6G,
W. Saad, O. Hashash, C. K. Thomas, C. Chaccour, M. Debbah, N. Mandayam, and Z. Han, “Artificial General Intelligence (AGI)-Native Wireless Systems: A Journey Beyond 6G,”Proceedings of the IEEE, vol. 113, no. 9, pp. 849–887, 2025
work page 2025
-
[15]
Toward Next Generation Open Radio Access Networks: What O-RAN Can and Cannot Do!
A. S. Abdalla, P. S. Upadhyaya, V . K. Shah, and V . Marojevic, “Toward Next Generation Open Radio Access Networks: What O-RAN Can and Cannot Do!”IEEE Network, vol. 36, no. 6, pp. 206–213, 2022
work page 2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.