Online Conformal Prediction with Corrupted Feedback
Pith reviewed 2026-05-21 07:08 UTC · model grok-4.3
The pith
Online conformal prediction can keep its calibration guarantees when feedback about past accuracy is corrupted by noise or flips.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
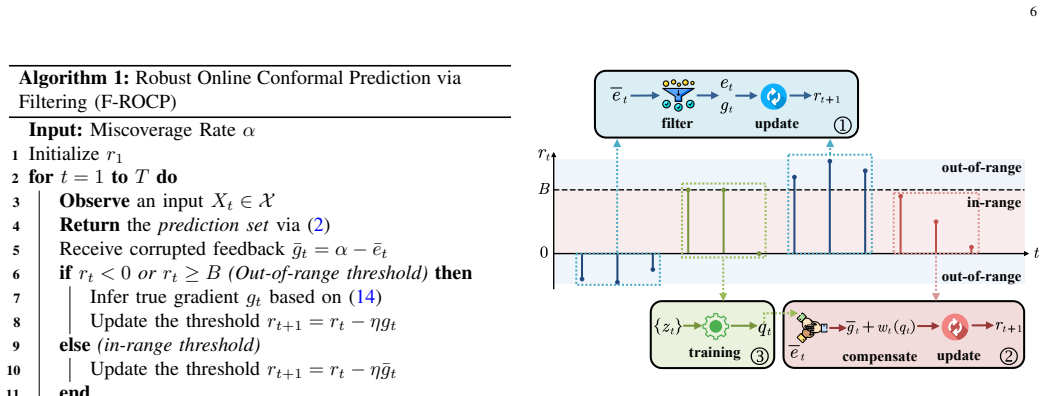
We model feedback corruption as an arbitrary binary flip sequence and analyze how it degrades the miscoverage performance of standard online conformal prediction. We then propose two robust schemes: robust OCP via filtering, which leverages the structural properties of the predicted threshold to filter corrupted feedback, and robust OCP via active compensation, which incorporates an active compensation mechanism to mitigate the effect of corrupted feedback. For both methods, we establish explicit miscoverage guarantees, which are further specialized for an independent stochastic flip model and for an arbitrary error model with memory bounds.
What carries the argument
The binary flip sequence model of feedback corruption, which supports both the degradation analysis of standard online conformal prediction and the derivation of restored miscoverage bounds for the filtering and active-compensation schemes.
If this is right
- Standard online conformal prediction loses its deterministic long-run miscoverage guarantee as soon as any positive fraction of feedback signals is flipped.
- Filtering observed coverage indicators according to the internal structure of the prediction threshold restores an explicit bound on miscoverage.
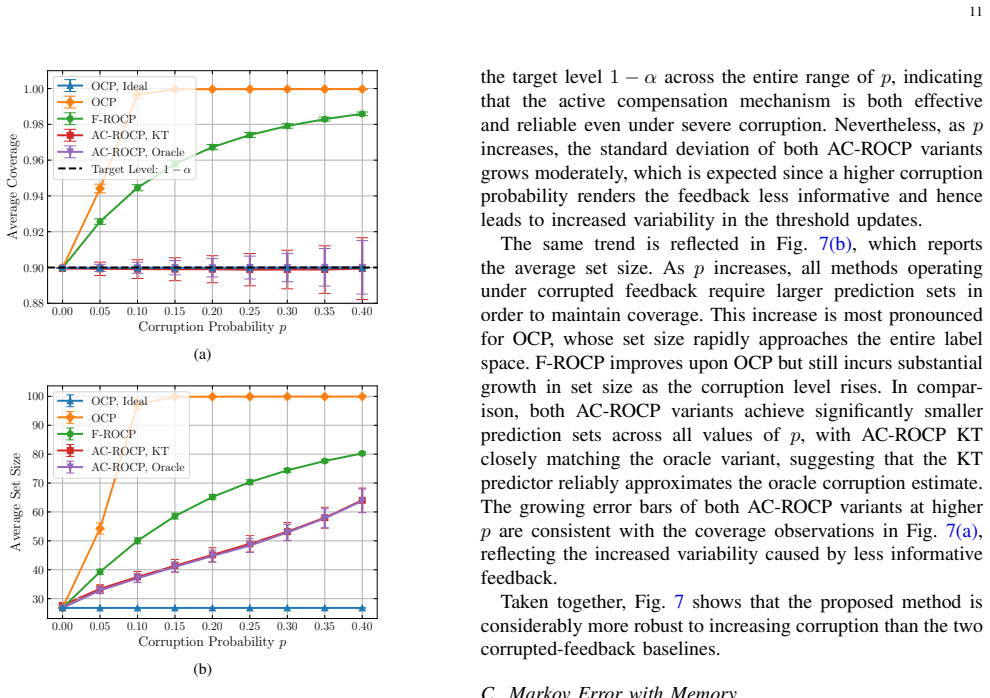
- An active compensation term added to the threshold update cancels the cumulative effect of flips and produces smaller prediction sets on average.
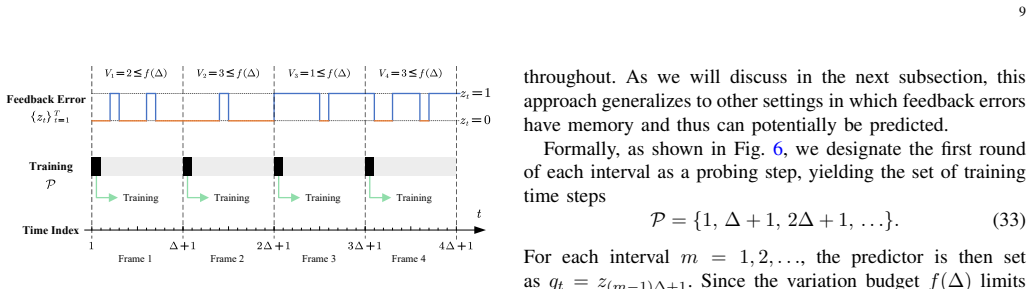
- The same bounds continue to hold when flips occur independently at random or when the error process has finite memory.
- Real-data experiments confirm that both schemes achieve markedly lower empirical miscoverage and smaller average set sizes than unmodified online conformal prediction.
Where Pith is reading between the lines
- The same flip-sequence analysis could be used to quantify robustness in other online set-valued predictors that rely on observed coverage signals.
- Systems that experience only temporary feedback outages would fall inside the bounded-memory error model and therefore inherit the paper's guarantees without extra tuning.
- One could test whether the compensation mechanism can be made fully adaptive by estimating the current flip rate from the stream itself.
Load-bearing premise
That every instance of corrupted feedback can be represented as a binary flip that simply inverts the true coverage indicator.
What would settle it
Generate a sequence of binary flips with a known rate or memory bound, apply one of the robust schemes to a streaming dataset, and measure whether the long-run fraction of uncovered outcomes stays strictly below the explicit bound derived in the paper.
Figures




read the original abstract
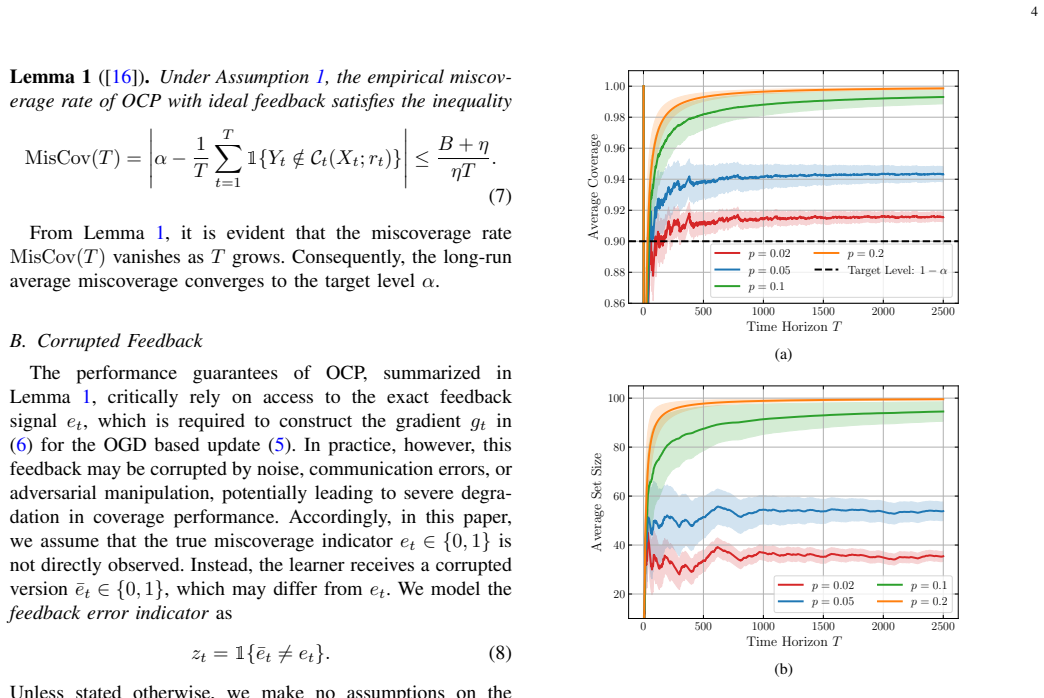
Modern artificial intelligence systems require calibrated uncertainty estimates that remain reliable in sequential and non-stationary environments. Online conformal prediction (OCP) addresses this challenge through adaptively updated prediction sets that provide deterministic long-run miscoverage guarantees. These guarantees, however, hinge on the assumption of perfect feedback about the coverage of past prediction sets. In practice, the observed miscoverage indicator may be corrupted by noise, communication failures, or adversarial manipulation, which can severely degrade OCP's calibration guarantees. In this paper, we study OCP under corrupted feedback. We first model feedback corruption as an arbitrary binary flip sequence, and analyze how feedback corruption affects and degrades the miscoverage performance of standard OCP. We then propose two robust schemes: robust OCP via filtering, which leverages the structural properties of the predicted threshold to filter corrupted feedback, and robust OCP via active compensation, which incorporates an active compensation mechanism to mitigate the effect of corrupted feedback. For both methods, we establish explicit miscoverage guarantees, which are further specialized for an independent stochastic flip model and for an arbitrary error model with memory bounds. Experiments on real-world datasets validate the proposed approach, showing markedly improved calibration and significantly smaller prediction sets compared with baseline OCP methods under corrupted feedback.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper models feedback corruption in online conformal prediction (OCP) as an arbitrary binary flip sequence, analyzes degradation of standard OCP guarantees, and proposes two robust schemes: filtering that exploits threshold structure and active compensation. It derives explicit miscoverage guarantees for both, specialized to an independent stochastic flip model and an arbitrary error model with memory bounds, and reports experiments on real-world datasets showing improved calibration and smaller prediction sets relative to baselines under corruption.
Significance. If the guarantees are correctly derived without hidden assumptions on the corruption process, the work meaningfully extends OCP theory to noisy and potentially adversarial feedback settings common in deployed systems. The provision of explicit (non-asymptotic) bounds and their specialization to both stochastic and bounded-memory arbitrary models, together with empirical validation, strengthens the contribution for practical sequential uncertainty quantification.
major comments (1)
- [Active compensation mechanism and Theorem for arbitrary error model] Active compensation section (around the description of the compensation mechanism and its guarantee for the arbitrary error model): the explicit miscoverage bound for the memory-bounded corruption case appears to require knowledge of the memory bound M to invert or bound the effect of the flip sequence while preserving the online threshold update. It is unclear whether M is an input to the algorithm or must be estimated from data; if the latter, the derived guarantee does not directly apply to the implemented procedure. This is load-bearing for the central claim of explicit guarantees under arbitrary corruption.
minor comments (2)
- [Experimental results] Experiments lack reported error bars, standard deviations, or multiple-run statistics, making it difficult to assess the statistical significance of the reported improvements in calibration and set size.
- [Problem formulation] The definition of the binary flip corruption sequence and its relation to the observed miscoverage indicator could be stated more explicitly with a short equation or pseudocode to aid readers.
Simulated Author's Rebuttal
We thank the referee for their careful reading of the manuscript and for identifying this important point of clarification regarding the active compensation mechanism. We address the comment below.
read point-by-point responses
-
Referee: Active compensation section (around the description of the compensation mechanism and its guarantee for the arbitrary error model): the explicit miscoverage bound for the memory-bounded corruption case appears to require knowledge of the memory bound M to invert or bound the effect of the flip sequence while preserving the online threshold update. It is unclear whether M is an input to the algorithm or must be estimated from data; if the latter, the derived guarantee does not directly apply to the implemented procedure. This is load-bearing for the central claim of explicit guarantees under arbitrary corruption.
Authors: We thank the referee for highlighting this point. In our development of the active compensation scheme, the memory bound M is a known parameter of the arbitrary error model with bounded memory and is provided as an explicit input to the algorithm. The compensation step uses knowledge of M to bound the worst-case propagation of any flip over the preceding M time steps when adjusting the online threshold. The explicit miscoverage guarantee in the corresponding theorem is derived under this modeling assumption that M is known; it does not rely on estimating M from observed data. This is consistent with the standard treatment of bounded-memory corruption models, where the bound is part of the model specification. We will revise the manuscript to state this assumption more explicitly in the algorithm description, the theorem statement, and the surrounding discussion to remove any ambiguity. revision: yes
Circularity Check
Guarantees derived from binary-flip model and threshold structure; no reduction to fitted inputs or self-referential definitions
full rationale
The derivation establishes miscoverage bounds by modeling corruption as an arbitrary binary flip sequence and exploiting structural properties of the online threshold update. These steps rely on the stated corruption model and standard OCP recursion rather than redefining quantities in terms of the target guarantee or fitting parameters to the same data used for validation. No load-bearing self-citation chain or ansatz smuggling is evident in the provided analysis; the central claims remain independent of the derived guarantees themselves.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Standard conformal prediction assumptions such as exchangeability or appropriate data conditions hold for the base method.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
rt+1 = rt − η(α − et) ... MisCov(T) ≤ B + η/ηT + |GT0→1 − GT1→0|/T + max{α GT1→0,(1−α)GT0→1}/T
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
robust OCP via filtering ... active compensation ... memory bounds f(Δ)
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
A survey of uncertainty in deep neural networks,
J. Gawlikowski et al., “A survey of uncertainty in deep neural networks,” Artif. Intell. Rev., vol. 56, no. Suppl 1, pp. 1513–1589, 2023
work page 2023
-
[2]
A review of uncertainty quantification in deep learning: Techniques, applications and challenges,
M. Abdar et al., “A review of uncertainty quantification in deep learning: Techniques, applications and challenges,” Inf. Fusion, vol. 76, pp. 243– 297, 2021
work page 2021
-
[3]
Secure mobile edge computing in IoT via collaborative online learning,
B. Li, T. Chen, and G. B. Giannakis, “Secure mobile edge computing in IoT via collaborative online learning,” IEEE Trans. Signal Process. , vol. 67, no. 23, pp. 5922–5935, 2019
work page 2019
-
[4]
On measures of uncertainty in classification,
S. Chlaily, D. Ratha, P. Lozou, and A. Marinoni, “On measures of uncertainty in classification,” IEEE Trans. Signal Process. , vol. 71, pp. 3710–3725, 2023
work page 2023
-
[5]
Bayesian Kalman- Net: Quantifying uncertainty in deep learning augmented Kalman filter,
Y . Dahan, G. Revach, J. Dunik, and N. Shlezinger, “Bayesian Kalman- Net: Quantifying uncertainty in deep learning augmented Kalman filter,” IEEE Trans. Signal Process. , vol. 73, pp. 2558–2573, 2025
work page 2025
-
[6]
Conformal inference for time series over graphs,
S. Dua, G. Mateos, and S. P. Chepuri, “Conformal inference for time series over graphs,” in Proc. IEEE Int. Conf. Acoust., Speech, Signal Process., 2026, pp. 181–185
work page 2026
-
[7]
Uncertainty-aware data-efficient AI: An information-theoretic perspective,
O. Simeone and Y . Romano, “Uncertainty-aware data-efficient AI: An information-theoretic perspective,”arXiv preprint arXiv:2512.05267, 2025
-
[8]
O. Shorinwa, Z. Mei, J. Lidard, A. Z. Ren, and A. Majumdar, “A survey on uncertainty quantification of large language models: Taxonomy, open research challenges, and future directions,” ACM Comput. Surv., vol. 58, no. 3, pp. 1–38, 2025
work page 2025
-
[9]
Juicer: Data- efficient imitation learning for robotic assembly,
L. Ankile, A. Simeonov, I. Shenfeld, and P. Agrawal, “Juicer: Data- efficient imitation learning for robotic assembly,” in Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst. IEEE, 2024, pp. 5096–5103
work page 2024
-
[10]
Observability guaranteed distributed intelligent sensing for industrial cyber-physical system,
Z. Ji, C. Chen, and X. Guan, “Observability guaranteed distributed intelligent sensing for industrial cyber-physical system,” IEEE Trans. Signal Process., vol. 72, pp. 5198–5212, 2024
work page 2024
-
[11]
Prediction-powered communication with distortion guarantees,
M. Zecchin, U. K. Ganesan, G. Durisi, P. Popovski, and O. Simeone, “Prediction-powered communication with distortion guarantees,” IEEE J. Sel. Areas Inf. Theory , 2026
work page 2026
-
[12]
M. Zhu, M. Zecchin, S. Park, C. Guo, C. Feng, P. Popovski, and O. Simeone, “Conformal distributed remote inference in sensor networks under reliability and communication constraints,” IEEE Trans. Signal Process., 2025
work page 2025
-
[13]
Conformal calibration: Ensuring the reliability of black-box AI in wireless systems,
O. Simeone, S. Park, and M. Zecchin, “Conformal calibration: Ensuring the reliability of black-box AI in wireless systems,” IEEE Commun. Mag., pp. 1–9, 2025
work page 2025
-
[14]
A. Angelopoulos, S. Bates, J. Malik, and M. I. Jordan, “Uncertainty sets for image classifiers using conformal prediction,” arXiv preprint arXiv:2009.14193, 2020
-
[15]
Exact and robust confor- mal inference methods for predictive machine learning with dependent data,
V . Chernozhukov, K. W¨uthrich, and Z. Yinchu, “Exact and robust confor- mal inference methods for predictive machine learning with dependent data,” in Proc. Conf. Learn. Theory . PMLR, Jul. 2018, pp. 732–749
work page 2018
-
[16]
Adaptive conformal inference under distribu- tion shift,
I. Gibbs and E. Candes, “Adaptive conformal inference under distribu- tion shift,” in Proc. Adv. Neural Inf. Process. Syst. , vol. 34, Dec. 2021, pp. 1660–1672
work page 2021
-
[17]
Conformal inference for online prediction with arbitrary distribution shifts,
I. Gibbs and E. J. Cand `es, “Conformal inference for online prediction with arbitrary distribution shifts,” J. Mach. Learn. Res., vol. 25, no. 162, pp. 1–36, 2024
work page 2024
-
[18]
Improved online conformal prediction via strongly adaptive online learning,
A. Bhatnagar, H. Wang, C. Xiong, and Y . Bai, “Improved online conformal prediction via strongly adaptive online learning,” in Proc. Int. Conf. Mach. Learn. PMLR, Jul. 2023, pp. 2337–2363
work page 2023
-
[19]
Localized adaptive risk control,
M. Zecchin and O. Simeone, “Localized adaptive risk control,” in Proc. Adv. Neural Inf. Process. Syst. , vol. 37, Dec. 2024, pp. 8165–8192
work page 2024
-
[20]
Error-quantified conformal inference for time series,
J. Wu, D. Hu, Y . Bao, S.-T. Xia, and C. Zou, “Error-quantified conformal inference for time series,” in Int. Conf. Learn. Represent. , Apr. 2025
work page 2025
-
[21]
Conformal prediction for time series,
C. Xu and Y . Xie, “Conformal prediction for time series,” IEEE Trans. Pattern Anal. Mach. Intell. , vol. 45, no. 10, pp. 11 575–11 587, 2023
work page 2023
-
[22]
Mirror online conformal prediction with intermittent feedback,
B. Wang, M. Zecchin, and O. Simeone, “Mirror online conformal prediction with intermittent feedback,” IEEE Signal Process. Lett. , vol. 32, pp. 2888–2892, 2025
work page 2025
-
[23]
Remote inference over dynamic links via adaptive rate deep task-oriented vector quanti- zation,
E. Fishel, M. Malka, S. Ginzach, and N. Shlezinger, “Remote inference over dynamic links via adaptive rate deep task-oriented vector quanti- zation,” IEEE Trans. Signal Process. , vol. 73, pp. 3557–3571, 2025
work page 2025
-
[24]
KPI poisoning: An attack in open RAN near real-time control loop,
H. Alimohammadi, S. Chatzimiltis, S. Mayhoub, M. Shojafar, S. A. Soleymani, A. Akbas, and C. H. Foh, “KPI poisoning: An attack in open RAN near real-time control loop,” in Proc. IEEE Future Netw. World Forum. IEEE, 2024, pp. 712–718
work page 2024
-
[25]
Label noise robustness of conformal prediction,
B.-S. Einbinder, S. Feldman, S. Bates, A. N. Angelopoulos, A. Gendler, and Y . Romano, “Label noise robustness of conformal prediction,” J. Mach. Learn. Res. , vol. 25, no. 328, pp. 1–66, 2024
work page 2024
-
[26]
Conformal prediction with corrupted labels: Uncertain imputation and robust re-weighting,
S. Feldman, S. Bates, and Y . Romano, “Conformal prediction with corrupted labels: Uncertain imputation and robust re-weighting,” arXiv preprint arXiv:2505.04733, 2025
-
[27]
Exploring the noise robustness of online conformal prediction,
H. Xi, K. Liu, H. Zeng, W. Sun, and H. Wei, “Exploring the noise robustness of online conformal prediction,” in Proc. Adv. Neural Inf. Process. Syst., Dec. 2025
work page 2025
-
[28]
Learning from noisy labels: A conformal prediction perspective,
Y .-Q. Chi, C.-C. Zong, T. Jin, and S.-J. Huang, “Learning from noisy labels: A conformal prediction perspective,” in Proc. IEEE Int. Conf. Acoust., Speech, Signal Process. , 2026, pp. 3776–3780
work page 2026
-
[29]
Online convex programming and generalized infinitesi- mal gradient ascent,
M. Zinkevich, “Online convex programming and generalized infinitesi- mal gradient ascent,” in Proc. Int. Conf. Mach. Learn. , 2003, pp. 928– 936
work page 2003
-
[30]
A Modern Introduction to Online Learning
F. Orabona, “A modern introduction to online learning,” arXiv preprint arXiv:1912.13213, 2019
work page internal anchor Pith review Pith/arXiv arXiv 1912
-
[31]
Online convex optimization in the bandit setting: gradient descent without a gradient
A. D. Flaxman, A. T. Kalai, and H. B. McMahan, “Online convex optimization in the bandit setting: gradient descent without a gradient,” arXiv preprint cs/0408007 , 2004
work page internal anchor Pith review Pith/arXiv arXiv 2004
-
[32]
Parameter-free regret in high probability with heavy tails,
J. Zhang and A. Cutkosky, “Parameter-free regret in high probability with heavy tails,” in Proc. Adv. Neural Inf. Process. Syst. , vol. 35, Nov. 2022, pp. 8000–8012
work page 2022
-
[33]
User-specified local differential privacy in uncon- strained adaptive online learning,
D. van der Hoeven, “User-specified local differential privacy in uncon- strained adaptive online learning,” in Proc. Adv. Neural Inf. Process. Syst., vol. 32, Dec. 2019
work page 2019
-
[34]
Online convex optimization with time-varying constraints and bandit feedback,
X. Cao and K. J. R. Liu, “Online convex optimization with time-varying constraints and bandit feedback,” IEEE Trans. Autom. Control , vol. 64, no. 7, pp. 2665–2680, 2019
work page 2019
-
[35]
Robust online convex optimization in the presence of outliers,
T. van Erven, S. Sachs, W. M. Koolen, and W. Kotlowski, “Robust online convex optimization in the presence of outliers,” in Proc. Conf. Learn. Theory. PMLR, 2021, pp. 4174–4194
work page 2021
-
[36]
Unconstrained robust online convex opti- mization,
J. Zhang and A. Cutkosky, “Unconstrained robust online convex opti- mization,” arXiv preprint arXiv:2506.12781 , 2025
-
[37]
Gradient equilibrium in online learning: Theory and applications,
A. N. Angelopoulos, M. I. Jordan, and R. J. Tibshirani, “Gradient equilibrium in online learning: Theory and applications,” arXiv preprint arXiv:2501.08330, 2025
-
[38]
Online conformal prediction with decaying step sizes,
A. N. Angelopoulos, R. F. Barber, and S. Bates, “Online conformal prediction with decaying step sizes,” arXiv preprint arXiv:2402.01139 , 2024
-
[39]
Distribution-informed online conformal prediction,
D. Hu, J. Wu, S.-T. Xia, and C. Zou, “Distribution-informed online conformal prediction,” in Int. Conf. Learn. Represent. , Apr. 2026
work page 2026
-
[40]
T. M. Cover, Elements of information theory . John Wiley & Sons, 1999
work page 1999
-
[41]
The performance of universal encod- ing,
R. Krichevsky and V . Trofimov, “The performance of universal encod- ing,” IEEE Trans. Inf. Theory , vol. 27, no. 2, pp. 199–207, 1981
work page 1981
-
[42]
Learning multiple layers of features from tiny images,
A. Krizhevsky and G. Hinton, “Learning multiple layers of features from tiny images,” University of Toronto, Toronto, ON, Canada, Tech. Rep., Apr. 2009. [Online]. Available: https://www.cs.toronto.edu/ ∼kriz/ learning-features-2009-TR.pdf
work page 2009
-
[43]
Deep residual learning for image recognition,
K. He, X. Zhang, S. Ren, and J. Sun, “Deep residual learning for image recognition,” in Proc. IEEE Conf. Comput. Vis. Pattern Recognit. , Jun. 2016, pp. 770–778
work page 2016
-
[44]
A V A: A large-scale database for aesthetic visual analysis,
N. Murray, L. Marchesotti, and F. Perronnin, “A V A: A large-scale database for aesthetic visual analysis,” in Proc. IEEE Conf. Comput. Vis. Pattern Recognit., Jun. 2012, pp. 2408–2415
work page 2012
-
[45]
D. A. Levin and Y . Peres, Markov chains and mixing times . American Mathematical Soc., 2017, vol. 107. 1 Online Conformal Prediction with Corrupted Feedback Bowen Wang, Graduate Student Member, IEEE , Matteo Zecchin, Member, IEEE, and Osvaldo Simeone, Fellow, IEEE. (Supplementary Material) APPENDIX A PROOF OF THEOREM 1 We first prove the lemma below that...
work page 2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.