Geolocation of Multiple Noncooperative Emitters Using Received Signal Strength: Sparsity, Resolution, and Detectability
Pith reviewed 2026-05-25 10:25 UTC · model grok-4.3
The pith
RSS data from multiple indistinguishable emitters yields quantifiable resolution and power detection limits when cast as a sparse recovery problem.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
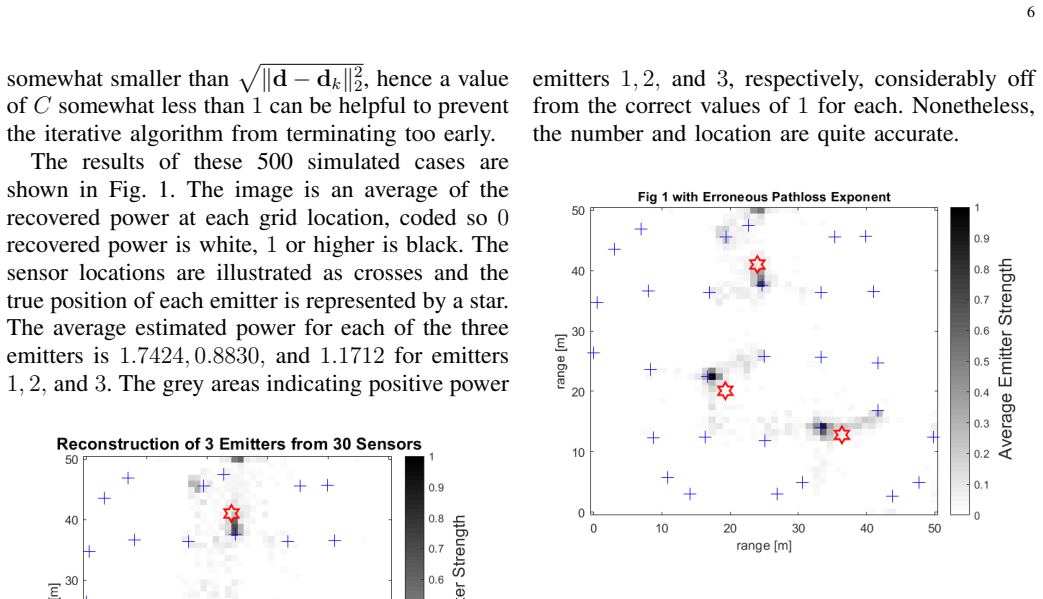
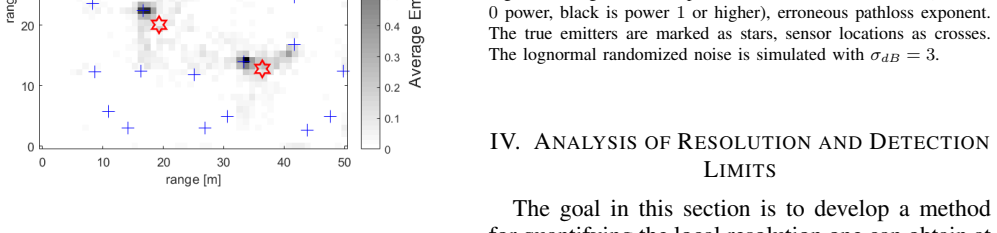
The recovery problem for multiple emitters using RSS data is formulated as one of sparse approximation or compressed sensing in a location basis. An appropriate recovery algorithm is investigated and used to characterize the limiting resolution and lowest detectable emitter power as functions of noise level, sensor geometry, and other variables. A reconstruction based on sampled data collected in the field illustrates the reasonableness of the parameter choices and conclusions.
What carries the argument
Sparse representation of emitter locations in a discretized location basis, recovered by a compressed-sensing algorithm applied to the RSS measurements.
If this is right
- Resolution between emitters improves directly with reduced noise variance or with changes in sensor geometry that increase the effective rank of the measurement matrix.
- The lowest detectable emitter power decreases as noise drops or as sensor placement improves the conditioning of the sparse recovery.
- The number of emitters need not be known in advance; the algorithm recovers both the count and the positions.
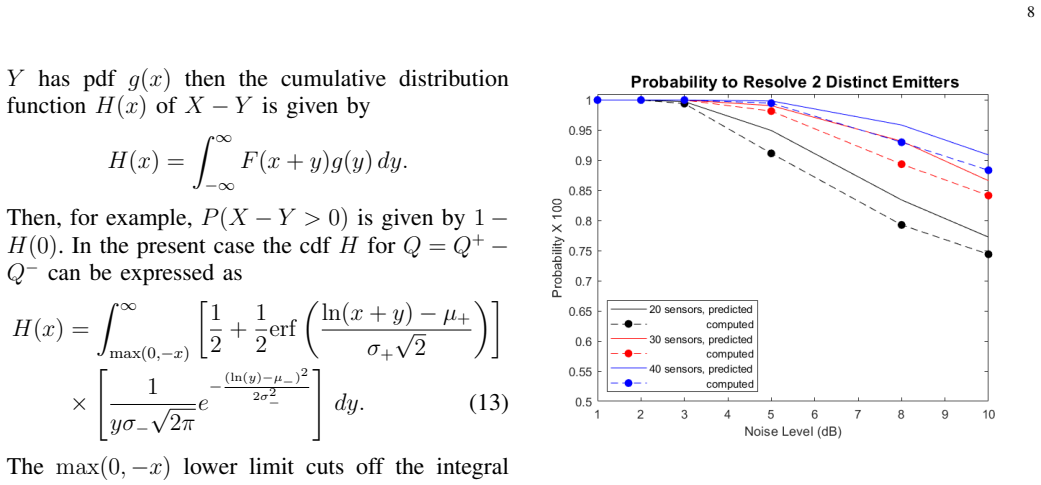
- No pre-collected RSS map of the environment is required for the recovery to proceed.
Where Pith is reading between the lines
- The same sparse model could be used to predict how adding or moving sensors changes the achievable resolution before any new data are collected.
- If the discretization grid is too coarse, the recovered positions will exhibit quantization bias whose size scales with grid spacing.
- The detectability thresholds supply a quantitative baseline against which RSS performance can be compared to time-of-arrival or angle-of-arrival methods in the same geometry.
Load-bearing premise
The RSS values can be written as a sparse linear combination over a dictionary of possible emitter positions, and a standard recovery algorithm can invert that combination without additional side information.
What would settle it
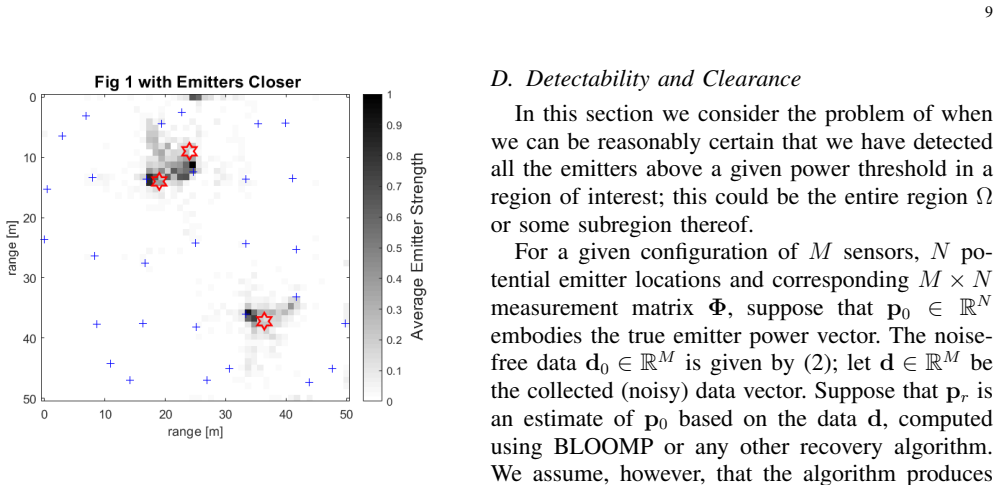
An experiment that places two emitters closer than the predicted resolution distance at the measured noise level and checks whether the algorithm returns them as two distinct sources rather than one.
Figures
read the original abstract
In this paper we investigate the problem of locating multiple non-cooperative radio frequency (RF) emitters using only received signal strength (RSS) data. We assume that the number of emitters is unknown and that individual emitters cannot be distinguished in the RSS data. Moreover, we assume that the environment in which the data has been collected has not been mapped or "fingerprinted" by the prior collection of RSS data. Our primary interest is the limiting resolution that can be obtained by this type of data, and the lowest power emitters that can be detected, as a function of noise level, sensor geometry, and other variables. We formulate the recovery problem as one of sparse approximation or compressed sensing, and investigate an appropriate recovery algorithm for this setting, and use it to illustrate our conclusions. We also include a reconstruction based on sampled data we collected, to illustrate the reasonableness of our parameter choices and conclusions.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that the limiting resolution and lowest detectable emitter power for multiple non-cooperative, indistinguishable RF emitters can be characterized as functions of noise level, sensor geometry, and related variables by formulating RSS measurements as a sparse approximation problem y = A x + noise (with A derived from a deterministic path-loss model on a location grid) and applying compressed-sensing recovery algorithms, illustrated via simulations and a real-data collection example without fingerprinting.
Significance. If the sparse recovery conditions hold, the work provides a model-based framework for deriving functional performance limits of RSS geolocation, which is significant for practical scenarios where environmental mapping is unavailable. The emphasis on unknown emitter count and lack of distinguishability, combined with both algorithmic investigation and real-data validation, strengthens the contribution if the derivations are reproducible.
major comments (2)
- [Model formulation and sensing matrix construction] The central claim that resolution and detectability limits can be characterized via sparse recovery rests on the sensing matrix A being exactly matched to the data-generating process (fixed path-loss exponent, on-grid emitters). The manuscript should explicitly address (e.g., via additional analysis or simulations in the recovery section) how performance degrades under log-normal shadowing or off-grid mismatch, as these violate the RIP/coherence conditions needed for reliable support recovery and directly impact the claimed functional dependence on noise and geometry.
- [Numerical results and real-data example] Table or figure presenting the numerical illustrations of resolution/detectability: if these results are generated only under exact model match (no shadowing, perfect grid alignment), they characterize performance only for the idealized case and do not fully support the general conclusions about limits in realistic environments.
minor comments (2)
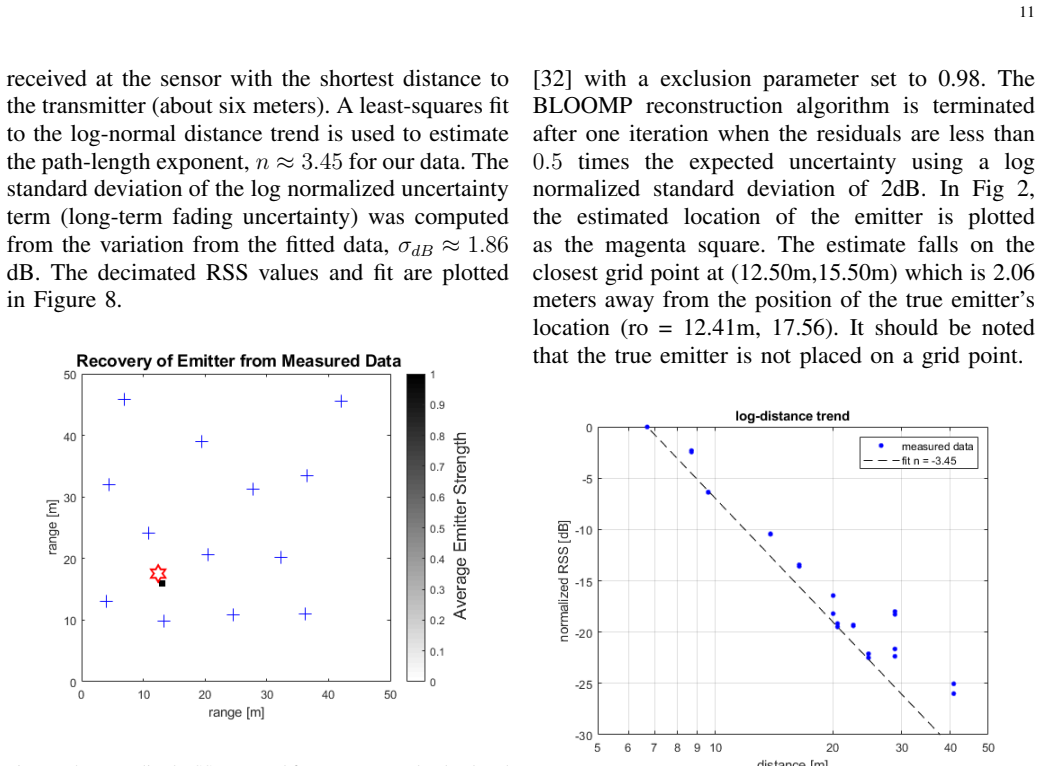
- [Real-data reconstruction] The real-data example is helpful for assessing parameter reasonableness, but additional details on grid discretization, choice of path-loss exponent, and how the collected data aligns with the assumed model would improve clarity.
- [Abstract and introduction] Ensure the abstract and introduction consistently define key terms such as 'limiting resolution' and 'lowest detectable power' with reference to the sparse recovery metrics used later.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment below and indicate where revisions will be made to strengthen the presentation.
read point-by-point responses
-
Referee: [Model formulation and sensing matrix construction] The central claim that resolution and detectability limits can be characterized via sparse recovery rests on the sensing matrix A being exactly matched to the data-generating process (fixed path-loss exponent, on-grid emitters). The manuscript should explicitly address (e.g., via additional analysis or simulations in the recovery section) how performance degrades under log-normal shadowing or off-grid mismatch, as these violate the RIP/coherence conditions needed for reliable support recovery and directly impact the claimed functional dependence on noise and geometry.
Authors: The core contribution of the work is the derivation of resolution and detectability limits under the deterministic path-loss model with on-grid emitters, which permits direct use of sparse recovery guarantees. We agree that log-normal shadowing and off-grid mismatch represent important practical deviations that would degrade performance relative to the idealized bounds. The real-data example already incorporates such effects implicitly. In the revision we will add a dedicated paragraph in the recovery section with new simulations quantifying the degradation for moderate shadowing variance and small grid mismatches, while preserving the main functional characterizations for the matched case. revision: yes
-
Referee: [Numerical results and real-data example] Table or figure presenting the numerical illustrations of resolution/detectability: if these results are generated only under exact model match (no shadowing, perfect grid alignment), they characterize performance only for the idealized case and do not fully support the general conclusions about limits in realistic environments.
Authors: The numerical results are generated under exact model match to illustrate the theoretical limits obtained from the sparse-approximation analysis. The real-data collection example is presented precisely to demonstrate behavior outside the ideal model. We will revise the text surrounding the numerical figures and the real-data section to explicitly distinguish the idealized simulations from the practical validation, thereby clarifying the scope of the claimed limits. revision: partial
Circularity Check
No circularity: model-based dictionary and CS recovery are external to the claimed limits
full rationale
The abstract and provided text formulate RSS geolocation as y = A x + noise with A constructed from a deterministic path-loss model (fixed exponent, on-grid) and apply standard sparse recovery. No equations, fitted parameters, or self-citations are shown that reduce the claimed resolution/detectability limits to the inputs by construction. The derivation therefore rests on external CS theory and the modeling assumptions rather than self-referential steps.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Network based wireless location,
A. H. Sayed, A. Tarighat and N. Khajehnouri, “Network based wireless location,” IEEE Signal Processing Magazine, vol. 22, no. 4, pp 24-40, July 2005. doi:10.1109/MSP.2005.1458275
-
[2]
Sparsity-Aware Wireless Networks: Local- ization and Sensor Selection,
Jamali-Rad, Hadi, “Sparsity-Aware Wireless Networks: Local- ization and Sensor Selection,” Ph.D. dissertation, Dept. Dept. of Microelectronics and Computer Engineering, TU Delft, 2014
work page 2014
-
[3]
Received Signal Strength based indoor positioning based on compressed sensing,
C. Feng, W.S. Anthea Au, Shahrokh Valaee, and Zhenhui Tan. “Received Signal Strength based indoor positioning based on compressed sensing,” IEEE Transactions on Mobile Com- puting, vol. 22, no. 12, pp. 1983-1993, December 2012. doi:10.1109/TMC.2011.216
-
[4]
On the accuracy of a cellular location sys- tem based on RSS measurements
A.J. Weiss, “On the accuracy of a cellular location sys- tem based on RSS measurements.” IEEE Trans on V e- hicular Technology , vol.52, no.6, pp. 1508-1518, 2003. doi:10.1109/TVT.2003.819613
-
[5]
Locating the nodes: coopera- tive localization in wireless sensor networks,
N. Patwari, J.N. Ash, S. Kyperountas, A.O. Hero III, R.L. Moses, and N.S. Correal, “Locating the nodes: coopera- tive localization in wireless sensor networks,” IEEE Signal Processing Magazine , vol.22, no.4, pp. 54- 69, July 2005. doi:10.1109/MSP.2005.1458287
-
[6]
Compressed Sensing Technologies and Chal- lenges for Aerospace and Defense RF Source Localiza- tion,
P. Daponte, L. De Vito, F. Picariello, S. Rapuano and I. Tudosa, “Compressed Sensing Technologies and Chal- lenges for Aerospace and Defense RF Source Localiza- tion,” 2018 5th IEEE International Workshop on Metrology for AeroSpace (MetroAeroSpace) , Rome, 2018, pp. 634-639. doi:10.1109/MetroAeroSpace.2018.8453560
-
[7]
Distributed spectrum sensing for cognitive radio networks by exploiting sparsity
J.A. Bazerque, and G.B. Giannakis. “Distributed spectrum sensing for cognitive radio networks by exploiting sparsity.” IEEE Transactions on Signal Processing 58.3 (2010): 1847-
work page 2010
-
[8]
doi:10.1109/TSP.2009.2038417
-
[9]
Joint spectrum sensing and primary user localization for cognitive radio via compressed sensing
Li, Xue, et al. “Joint spectrum sensing and primary user localization for cognitive radio via compressed sensing.” MILCOM 2010 MILITARY COMMUNICATIONS CONFERENCE, San Jose CA, November 2010. doi:10.1109/MILCOM.2010.5680334
-
[10]
Low Cost, Low Complexity Sensor Design for Non-Cooperative Geolocation via Received Signal Strength,
M.S. Butler, “Low Cost, Low Complexity Sensor Design for Non-Cooperative Geolocation via Received Signal Strength,” Masters Thesis, Department of Electrical and Computer Engi- neering, Air Force Institute of Technology, 2012
work page 2012
-
[11]
Development of a Model and Localization Algorithm for Received Signal Strength-Based Geolocation,
Amanda S. King, “Development of a Model and Localization Algorithm for Received Signal Strength-Based Geolocation,” Ph.D. Dissertation, Department of Electrical and Computer Engineering, Air Force Institute of Technology, 2013
work page 2013
-
[12]
Multiple UA V tomography based geolocation of RF emitters,
D.J. Walter, J. Klein, J. Kaupert, C. Bullmaster, and V . Chakravarthy, “Multiple UA V tomography based geolocation of RF emitters,” proceedings of Proc. SPIE 7707, Defense Transformation and Net-Centric Systems 2010 , April 5-9, 2010. doi:10.1117/12.850168
-
[13]
Localization of RF Emitters using Com- pressed Sensing with Multiple Cooperative Sensors,
D.J. Walter, K. Bryan, J. Stephens, C. Bullmaster, and V . Chakravarthy, “Localization of RF Emitters using Com- pressed Sensing with Multiple Cooperative Sensors,” pro- ceedings of NAECON 2012 , Dayton OH, July 25-27 2012. doi:10.1109/NAECON.2012.6531060
-
[14]
An introduction to IEEE STD 802.15.4
J.T. Adams. “An introduction to IEEE STD 802.15.4.” proceed- ings of 2006 IEEE Aerospace Conference, Big Sky MT, pp. 1-8,
work page 2006
-
[15]
doi:10.1109/AERO.2006.1655947
-
[16]
A Practical Evalua- tion of Radio Signal Strength for Ranging-based Localization,
K. Whitehouse, C. Karlof, and D. Culler, “A Practical Evalua- tion of Radio Signal Strength for Ranging-based Localization,” ACM SIGMOBILE Mobile Comput. Commun. Rev. , vol. 11, no. 1, pp. 41-52, 2007. doi:10.1145/1234822.1234829
-
[17]
Guarantee- ing Practical Con- vergence in Algorithms for Sensor and Source Localization,
B. Fidan, S. Dasgupta, and B.D.O. Anderson, “Guarantee- ing Practical Con- vergence in Algorithms for Sensor and Source Localization,” IEEE Transactions on Signal Process- ing, V ol. 56, No. 9, pp. 4458 - 4469, September 2008. doi:10.1109/TSP.2008.924138
-
[18]
Decentralized task distribution among cooperative UA Vs in surveillance systems applications,
E.P. de Freitas, T. Heimfarth, A.M. Ferreira, C.E. Pereira, F.R. Wagner, and T. Larsson, “Decentralized task distribution among cooperative UA Vs in surveillance systems applications,” Sev- enth International Conference on Wireless On-demand Network Systems and Services (WONS) , pp. 121-128, Feb. 3-5, 2010. doi:10.1109/WONS.2010.5437123
-
[19]
Distributed target localization via spatial sparsity,
V . Cevher, M. F. Duarte, and R. G. Baraniuk, “Distributed target localization via spatial sparsity,” 2008 16th European Signal Processing Conference (EUSIPCO) 2008 , Lausanne, Switzerland, pp. 25-29 August 2008
work page 2008
-
[20]
Multiple Target Localization Using Compressive Sensing,
C. Feng, S. Valaee, Z. Tan, “Multiple Target Localization Using Compressive Sensing,” proceeding ofGLOBECOM 2009 - 2009 IEEE Global Telecommunications Conference , Honolulu HI, December 2009. doi:10.1109/GLOCOM.2009.5425808
-
[21]
Compressed Remote Sensing of Sparse Objects,
A.C. Fannjiang, T. Strohmer, and P. Yan, “Compressed Remote Sensing of Sparse Objects,” SIAM J. Imaging Sci. , 3(3), 595- 618, doi:10.1137/090757034
-
[22]
Radio-Frequency Transmitter Geolocation Us- ing Non-Ideal Received Signal Strength Indicators,
S. Whiting, “Radio-Frequency Transmitter Geolocation Us- ing Non-Ideal Received Signal Strength Indicators,” Masters Thesis, Department of Electrical and Computer Engineering, University of Utah, 2018
work page 2018
-
[23]
Performance Analysis of RSS Fingerprinting Based In- door Localization,
X. Tian, R. Shen, D. Liu, Y . Wen and X. Wang, “Performance Analysis of RSS Fingerprinting Based In- door Localization,” IEEE Transactions on Mobile Com- puting, vol. 16, no. 10, pp. 2847-2861, 1 Oct. 2017. doi:10.1109/TMC.2016.2645221
-
[24]
Relative location estimation in wireless sensor networks,
N. Patwari, A.O. Hero, M. Perkins, N.S. Correal, R.J. O’Dea. “Relative location estimation in wireless sensor networks,” IEEE Transactions on signal processing 51.8 (2003): 2137-
work page 2003
-
[25]
doi:10.1109/TSP.2003.814469
-
[26]
Barankin bounds for position estimation using received signal strength measurements,
H. Koorapaty, “Barankin bounds for position estimation using received signal strength measurements,” 2004 IEEE 59th V ehicular Technology Conference. VTC 2004-Spring (IEEE Cat. No.04CH37514), vol. 5, pp 2686-2690, 2004. doi:10.1109/VETECS.2004.1391408
-
[27]
Distance Estimation From Received Signal Strength Under Log-Normal Shadowing: Bias and Variance,
S.D. Chitte, S. Dasgupta, Z. Ding, “Distance Estimation From Received Signal Strength Under Log-Normal Shadowing: Bias and Variance,” IEEE Signal Processing Letters , vol. 16, issue 3, March 2009. doi:10.1109/LSP.2008.2012229
-
[28]
Source localization from received sig- nal strength under lognormal shadowing,
Sree Divya Chitte, “Source localization from received sig- nal strength under lognormal shadowing,” Dept. of Electri- cal and Computer Engineering, University of Iowa, 2010. doi:10.17077/etd.getg4038
-
[29]
ESPRIT-estimation of signal parameters via rotational invariance techniques,
R. Roy and T. Kailath, “ESPRIT-estimation of signal parameters via rotational invariance techniques,”IEEE Trans. On Acoustics, Speech, and Signal Processing , vol. 37, no. 7, pp. 984-995,
-
[30]
doi:10.1109/29.32276
-
[31]
Multiple emitter location and signal parameter estimation,
R. Schmidt, “Multiple emitter location and signal parameter estimation,” IEEE Trans. On Antennas and Propagation , vol. 34, no. 3, pp 276-280, 1986. doi:10.1109/TAP.1986.1143830
-
[32]
Modeling and mitigating noise and nuisance 14 parameters in received signal strength positioning,
R.K. Martin, A. King, J. Pennington, R. Thomas, R. Lenahan, and C. Lawyer, “Modeling and mitigating noise and nuisance 14 parameters in received signal strength positioning,” IEEE Trans. Signal Processing, vol. 60, no. 10, pp 5451-5463, October 2012. doi:10.1109/TSP.2012.2207118
-
[33]
S. Foucart and H. Rauhut, A Mathematical Introduction to Com- pressive Sensing , New York: Springer Science and Business Media, 2013
work page 2013
-
[34]
Stable recovery of sparse overcomplete representations in the presence of noise,
D. Donoho, M. Elad, VN. Temlyakov, “Stable recovery of sparse overcomplete representations in the presence of noise,” IEEE Trans. Inform. Theory , vol. 52 pp. 6-18, Jan. 2006. doi:10.1109/TIT.2005.860430
-
[35]
Sparse approximate solutions to linear systems,
B.K. Natarajan, “Sparse approximate solutions to linear systems,”, SIAM J. Comput. , vol. 24, pp 227-234, 1995. doi:10.1137/S0097539792240406
-
[36]
Coherence pattern-guided com- pressive sensing with unresolved grids,
A. Fannjiang and W. Liao, “Coherence pattern-guided com- pressive sensing with unresolved grids,” SIAM J. Imag- ing Sciences , vol. 5, no. 1, pp. 179-202, Feb. 2012. doi:10.1137/110838509
-
[37]
An Introduction To Compressive Sampling,
E.J. Cand ´es, and M.B. Wakin,“An Introduction To Compressive Sampling,” IEEE SIGNAL PROCESSING MAGAZINE , vol. 21, March 2008. doi:10.1109/MSP.2007.914731
-
[38]
Approximating a Sum of Random Variables with a Lognormal,
N.B. Mehta and A.F. Molisch, “Approximating a Sum of Random Variables with a Lognormal,” IEEE Trans. of Wireless Communications, vol.6, No. 7, pp. 2690-2699, July 2007. doi:10.1109/TWC.2007.051000
-
[39]
A low-cost desktop software defined radio design environment using MATLAB, simulink, and the RTL-SDR,
R.W. Stewart et al. “A low-cost desktop software defined radio design environment using MATLAB, simulink, and the RTL-SDR,” IEEE Communications Magazine, vol. 53, issue 9, pp. 64-71, September 2015. doi:10.1109/MCOM.2015.7263347
-
[40]
Best practice in RSS measurements and ranging,
A. Zanella, “Best practice in RSS measurements and ranging, ” IEEE Communications Surveys and Tutorials vol. 18, issue 4, pp. 2662-2686, 2016. doi:10.1109/COMST.2016.2553452
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.