TPM: A GPS-based Trajectory Pattern Mining System
Pith reviewed 2026-05-25 02:05 UTC · model grok-4.3
The pith
TPM clusters spatial-temporal GPS data to find dense urban areas and extracts similar trajectories with a proposed matching method.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
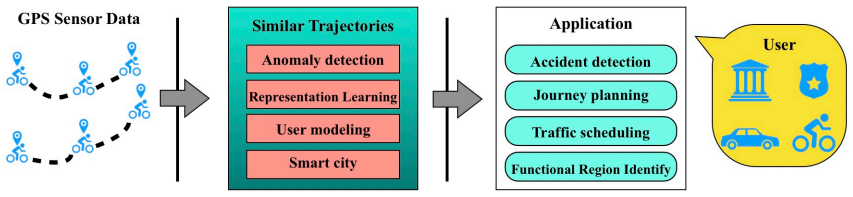
The TPM system mines urban dense areas via clustering the spatial-temporal data, automatically generates trajectories after the timing trajectory identification, and extracts similar trajectories via the proposed trajectory similarity matching method for applications including traffic navigation and urban planning.
What carries the argument
The trajectory similarity matching method, which identifies and extracts similar trajectories after initial clustering of dense areas from GPS data.
Load-bearing premise
The proposed trajectory similarity matching method will reliably extract useful similar trajectories when applied to real GPS data from vehicles or wearables.
What would settle it
Run the TPM system on a labeled set of real vehicle GPS trajectories from a city and verify whether the extracted similar trajectories align with known common routes or congestion patterns rather than random groupings.
Figures







read the original abstract
With the development of big data and artificial intelligence, the technology of urban computing becomes more mature and widely used. In urban computing, using GPS-based trajectory data to discover urban dense areas, extract similar urban trajectories, predict urban traffic, and solve traffic congestion problems are all important issues. This paper presents a GPS-based trajectory pattern mining system called TPM. Firstly, the TPM can mine urban dense areas via clustering the spatial-temporal data, and automatically generate trajectories after the timing trajectory identification. Mainly, we propose a method for trajectory similarity matching, and similar trajectories can be extracted via the trajectory similarity matching in this system. The TPM can be applied to the trajectory system equipped with the GPS device, such as the vehicle trajectory, the bicycle trajectory, the electronic bracelet trajectory, etc., to provide services for traffic navigation and journey recommendation. Meantime, the system can provide support in the decision for urban resource allocation, urban functional region identification, traffic congestion and so on.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents TPM, a GPS-based trajectory pattern mining system for urban computing. It claims to mine dense urban areas by clustering spatial-temporal GPS data, automatically generate trajectories via timing identification, propose a trajectory similarity matching method to extract similar trajectories, and apply the system to vehicle, bicycle, and electronic bracelet trajectories to support traffic navigation, journey recommendation, urban resource allocation, functional region identification, and congestion mitigation.
Significance. If the similarity matching method were rigorously defined with a distance metric, algorithm, and validated on real GPS traces with quantitative metrics and baselines, the system could offer practical value for trajectory-based urban services. The current manuscript supplies only high-level description with no such details or evidence, so no positive significance assessment is possible.
major comments (2)
- [Abstract] Abstract: The claim that 'we propose a method for trajectory similarity matching' is unsupported; the text provides no formal definition, distance metric, pseudocode, equations, or algorithmic description of this method.
- [Abstract] Abstract: The assertion that 'similar trajectories can be extracted via the trajectory similarity matching in this system' rests on description alone; the manuscript reports zero datasets, accuracy metrics, error analysis, or comparisons to prior trajectory similarity methods.
Simulated Author's Rebuttal
We thank the referee for the detailed review of our manuscript on the TPM system. We address the major comments on the abstract point by point below.
read point-by-point responses
-
Referee: [Abstract] Abstract: The claim that 'we propose a method for trajectory similarity matching' is unsupported; the text provides no formal definition, distance metric, pseudocode, equations, or algorithmic description of this method.
Authors: We agree that the abstract and manuscript text provide only a high-level description of the trajectory similarity matching component without formal definitions, distance metrics, pseudocode, or equations. The manuscript emphasizes the overall system rather than low-level algorithmic details. We will revise the abstract to remove or qualify the claim of proposing a detailed method. revision: yes
-
Referee: [Abstract] Abstract: The assertion that 'similar trajectories can be extracted via the trajectory similarity matching in this system' rests on description alone; the manuscript reports zero datasets, accuracy metrics, error analysis, or comparisons to prior trajectory similarity methods.
Authors: The manuscript indeed contains no datasets, quantitative metrics, error analysis, or baseline comparisons for the similarity matching. The text is limited to conceptual description of the system. We will revise the abstract to remove the unsupported assertion about extraction of similar trajectories. revision: yes
- Absence of any experimental results, datasets, or quantitative validation for the claimed similarity matching method, as none exist in the current manuscript.
Circularity Check
No circularity: system description contains no derivations, equations, or predictions that reduce to inputs.
full rationale
The manuscript is a high-level system proposal for TPM. It describes clustering for dense areas and asserts a trajectory similarity matching method, but supplies no equations, algorithms, fitted parameters, or quantitative predictions. No derivation chain exists to inspect for self-definition, fitted-input predictions, or self-citation load-bearing. The text is self-contained as an engineering overview without mathematical claims that could be circular by construction.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Urban Computing: Concepts, Methodologies, and Applications
Zheng Y , Capra L, Wolfson O, et al. Urban Computing: Concepts, Methodologies, and Applications. ACM Transactions on Intelligent Systems and Technology. 2014, 5(3), 38:1-38:55
work page 2014
-
[2]
Trajectory data mining: An overview
Zheng Y . Trajectory data mining: An overview. ACM Transactions on Intelligent Systems and Technology. 2015, 6(3), 29:129:41
work page 2015
-
[3]
Giannotti F, Nanni M, Pinelli F, et al. Trajectory pattern mining. In Proceedings of the 13th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining. 2007:330-339
work page 2007
-
[4]
Discovering regions of different functions in a city using human mobility and POIs
Yuan J, Zheng Y , Xie X. Discovering regions of different functions in a city using human mobility and POIs. In Proceedings of the 18th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining. 2012:186-194
work page 2012
-
[5]
Planning Bike Lanes based on Sharing-Bikes’ Trajectories
Bao J, He T, Ruan S, et al. Planning Bike Lanes based on Sharing-Bikes’ Trajectories. In Proceedings of the 23rd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining. 2017: 1377- 1386
work page 2017
-
[6]
He T, Bao J, Li R, et al. 2018. Detecting Vehicle Illegal Parking Events using Sharing Bikes Trajectories. In Proceedings of the 24th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining. 2018: 340-349
work page 2018
-
[7]
Trajectory-driven Influential Billboard Placement
Zhang P, Li G, Bao Z, et al. Trajectory-driven Influential Billboard Placement. In Proceedings of the 24th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining. 2018:27482757
work page 2018
-
[9]
Managing Massive Trajectories on the Cloud
Bao J, Li R, Yi X, et al. Managing Massive Trajectories on the Cloud. In 24th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems. 2016
work page 2016
-
[10]
DITA: A Distributed In-Memory Trajectory Analytics System
Shang Z, Li G, Bao Z. DITA: A Distributed In-Memory Trajectory Analytics System. In Proceedings of the 2018 International Conference on Management of Data. 2018:1681-1684
work page 2018
-
[11]
Torch: A search engine for trajectory data
Wang S, Bao Z, Culpepper J, et al. Torch: A search engine for trajectory data. In 41st International Conference on Research and Development in Information Retrieval. 2018:535544
work page 2018
-
[12]
IEEE Transactions on Image Processing
Wang Y , Lin X, Wu L, et al, Robust subspace clustering for multi-view data by exploiting correlation consensus. IEEE Transactions on Image Processing. 2015, 24(11):3939-3949
work page 2015
-
[13]
Multiview Spectral Clustering via Struc- tured Low-Rank Matrix Factorization
Wang Y , Wu L, Lin X, Gao J. Multiview Spectral Clustering via Struc- tured Low-Rank Matrix Factorization. IEEE Transactions on Neural Networks and Learning Systems. 2018, 29 (10):4833-4843
work page 2018
-
[14]
Wang Y , Zhang W, Wu L, et al., Iterative Views Agreement: An Iterative Low-Rank based Structured Optimization Method to Multi- View Spectral Clustering. IJCAI 2016
work page 2016
-
[15]
Effective Multi-Query Expansions: Collaborative Deep Networks for Robust Landmark Retrieval
Wang Y , Lin X, Wu L, Zhang W. Effective Multi-Query Expansions: Collaborative Deep Networks for Robust Landmark Retrieval. IEEE Transactions on Image Processing. 2017, 26 (3):1393-1404
work page 2017
-
[16]
Deep Attention-based Spatially Recursive Networks for Fine-Grained Visual Recognition
Wu L, Wang Y , Li X, Gao J. Deep Attention-based Spatially Recursive Networks for Fine-Grained Visual Recognition. IEEE Transactions on Cybernetics. 2019, 49 (5):1791-1802
work page 2019
-
[17]
Wu L, Wang Y , Gao J, Li X. Deep Adaptive Feature Embedding with Local Sample Distributions for Person Re-identification, Pattern Recognition. 2018, 73:275-288
work page 2018
-
[18]
Cycle-Consistent Deep Generative Hashing for Cross-Modal Retrieval
Wu L, Wang Y , Shao L. Cycle-Consistent Deep Generative Hashing for Cross-Modal Retrieval. IEEE Transactions on Image Processing. 2019, 28 (4):1602-1612
work page 2019
-
[19]
Where-and-When to Look: Deep Siamese Attention Networks for Video-based Person Re-identification
Wu L, Wang Y , Gao J, Li X. Where-and-When to Look: Deep Siamese Attention Networks for Video-based Person Re-identification. IEEE Transactions on Multimedia. 2019, 21 (6):1412-1424
work page 2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.