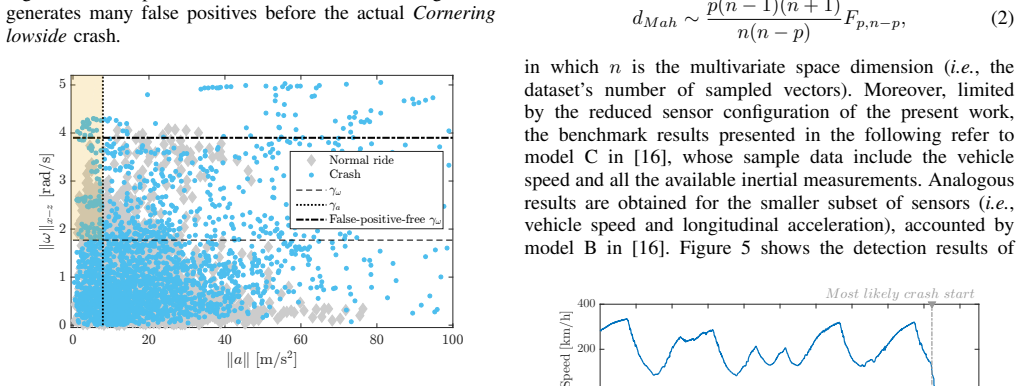
Analysis and development of an automatic eCall for motorcycles: a one-class cepstrum approach
Pith reviewed 2026-05-24 19:12 UTC · model grok-4.3
The pith
One-class cepstrum analysis detects motorcycle crashes by focusing on sensor data dynamics.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The one-class cepstrum approach detects anomalies in motorcycle sensor data time series, allowing the system to trigger an eCall only when a crash occurs by directly focusing on data dynamics instead of combinations of instantaneous signal values.
What carries the argument
One-class cepstrum features from the data time series, which capture the underlying dynamics to classify normal versus anomalous behavior.
If this is right
- The eCall triggers only on real crashes, reducing false positives.
- Performance is validated against real driving data including crashes.
- The method outperforms approaches based on instantaneous signal values.
- It can be calibrated using data from multiple drivers.
Where Pith is reading between the lines
- This could extend to other types of vehicles or similar anomaly detection tasks in engineering.
- Further testing in varied conditions might reveal the limits of generalization from the small crash dataset.
- Integration with existing vehicle sensors could make eCall standard on motorcycles.
Load-bearing premise
That the one-class cepstrum features from data of ten drivers and seven crashes will separate crashes from normal dynamics in all unseen conditions without many false positives.
What would settle it
A test on a large new set of normal driving data from different drivers showing frequent false eCall triggers would falsify the reliability claim.
Figures

read the original abstract
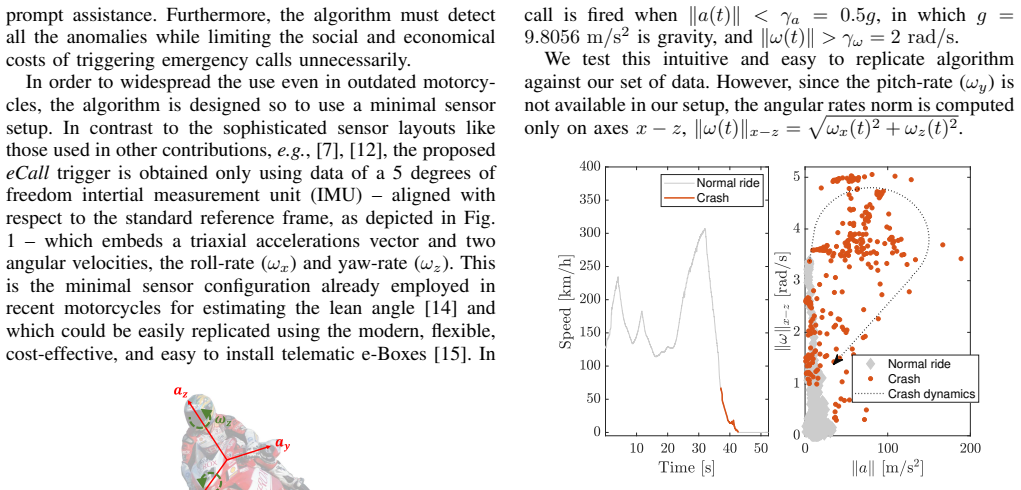
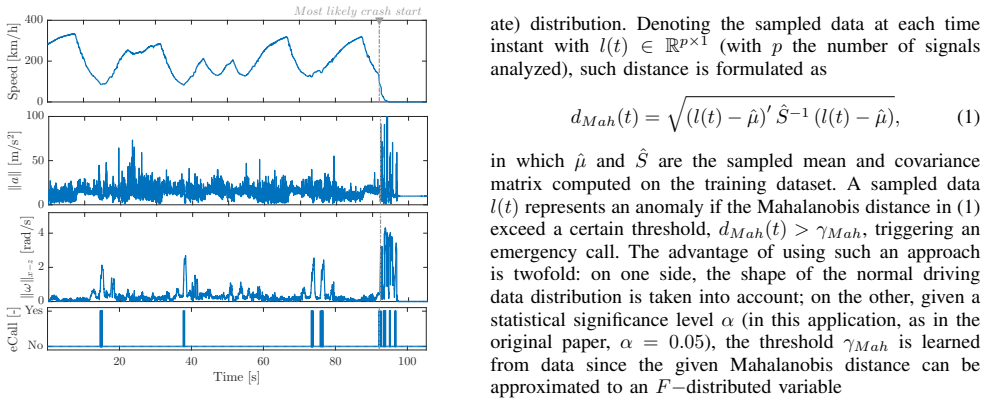
The automatic dial of an emergency call - eCall - in response to a road accident is a feature that is gaining interest in the intelligent vehicle community. It indirectly increases the driving safety of road vehicles, but presents the technical challenge of developing an algorithm which triggers the emergency call only when needed, a non-trivial task for two-wheeled vehicles due to their complex dynamics. In the present work, we propose an eCall algorithm that detects these anomalies in the data time series, thanks to the cepstral analysis. The main advantage of the proposed approach is the direct focus on the data dynamics, solving the limits of approaches based on the analysis of the instantaneous value of some signals combination. The algorithm is calibrated and tested against real driving data of ten different drivers, including seven real crash events, and performance are compared with known methods.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a one-class cepstrum approach for automatic eCall triggering on motorcycles. It detects crashes as anomalies in time-series dynamics via cepstral analysis, claiming this overcomes limitations of methods based on instantaneous signal combinations. The algorithm is calibrated and tested on real driving data from ten drivers that include seven real crash events, with performance comparisons to known methods.
Significance. If the empirical separation holds under proper generalization testing, the work could support more reliable eCall systems for two-wheeled vehicles by reducing false positives arising from complex normal dynamics. The use of real crash data, even if limited, is a concrete strength relative to purely simulated evaluations.
major comments (2)
- [Abstract] Abstract: the central claim of reliable crash detection without high false positives rests on calibration and testing with exactly seven real crashes from ten drivers. For a one-class anomaly detector this positive-class sample size is load-bearing; no evidence is supplied that the learned feature distribution separates a held-out crash or maintains low false-positive rates on normal segments from unseen riders or conditions.
- [Abstract] Abstract: no quantitative metrics (detection rate, false-positive rate, or comparison numbers), no description of the cepstral feature extraction parameters, and no validation procedure (e.g., leave-one-crash-out) are reported, so the performance-comparison claim cannot be assessed.
minor comments (1)
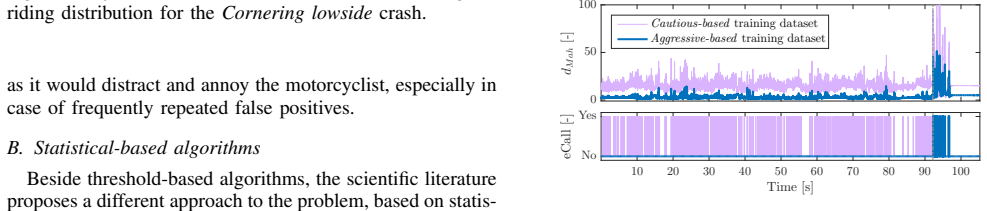
- [Abstract] Abstract contains a minor grammatical issue: 'performance are compared' should read 'performance is compared'.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on the abstract. We address each point below and will revise the abstract to improve clarity while preserving its length constraints.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim of reliable crash detection without high false positives rests on calibration and testing with exactly seven real crashes from ten drivers. For a one-class anomaly detector this positive-class sample size is load-bearing; no evidence is supplied that the learned feature distribution separates a held-out crash or maintains low false-positive rates on normal segments from unseen riders or conditions.
Authors: The full manuscript trains the one-class model exclusively on normal driving segments from the ten riders and evaluates anomaly detection on the seven crashes. Cross-driver validation (leaving out individual riders' normal data) is used to assess performance on unseen riders. We acknowledge that seven crashes is a small positive-class sample and will add explicit discussion of this limitation plus the held-out rider results to the revised manuscript. The abstract will be updated to reference the cross-validation approach. revision: partial
-
Referee: [Abstract] Abstract: no quantitative metrics (detection rate, false-positive rate, or comparison numbers), no description of the cepstral feature extraction parameters, and no validation procedure (e.g., leave-one-crash-out) are reported, so the performance-comparison claim cannot be assessed.
Authors: We agree the abstract is overly concise. The body of the paper reports detection/false-positive rates, cepstral order and window parameters, and the leave-one-rider-out validation used for the comparisons. We will revise the abstract to include the key performance numbers and a brief statement of the validation and feature settings. revision: yes
Circularity Check
No significant circularity detected
full rationale
The abstract and available description present a cepstral analysis method for anomaly detection in time-series data, calibrated and tested on external real-world driving data from ten drivers including seven crashes. No equations, derivations, or self-citations are shown that reduce any claimed result to fitted inputs by construction, self-definition, or load-bearing self-reference. The method is described as focusing on dynamics and compared to known methods, with performance evaluated against held-out crash events, making the central claim self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Global status report on road safety 2018,
World Health Organization, “Global status report on road safety 2018,” 2018
work page 2018
-
[2]
Road infrastructure and safety of power two wheelers,
G. Yannis, E. Vlahogianni, J. Golias, and P. Saleh, “Road infrastructure and safety of power two wheelers,” Proceedings of the 12th World Congress on Transportation Research (WCTR) , 2010
work page 2010
-
[3]
A review of risk factors and patterns of motorcycle injuries,
M.-R. Lin and J. F. Kraus, “A review of risk factors and patterns of motorcycle injuries,” Accident Analysis & Prevention , 2009
work page 2009
-
[4]
Management priorities in patients with polytrauma,
C. Krettek, R. G. Simon, and H. Tscherne, “Management priorities in patients with polytrauma,” Langenbeck’s archives of surgery , 1998
work page 1998
-
[5]
Introducing connected vehicles,
E. Uhlemann, “Introducing connected vehicles,” IEEE Vehicular Tech- nology Magazine, 2015
work page 2015
-
[6]
From twitter to detector: Real-time traffic incident detection using social media data,
Y . Gu, Z. Qian, and F. Chen, “From twitter to detector: Real-time traffic incident detection using social media data,” Transportation research part C: emerging technologies , 2016
work page 2016
-
[7]
A simple fall detection algorithm for powered two wheelers,
A. Boubezoul, S. Espi ´e, B. Larnaudie, and S. Bouaziz, “A simple fall detection algorithm for powered two wheelers,” Control Engineering Practice, 2013
work page 2013
-
[8]
Development of a fall detection algorithm for powered two wheelers application,
F. Giovannini, N. Baldanzini, and M. Pierini, “Development of a fall detection algorithm for powered two wheelers application,” SAE Technical Paper 2014-32-0022, 2014
work page 2014
-
[9]
A. Bellati, V . Cossalter, R. Lot, and A. Ambrogi, “Preliminary investigation on the dynamics of motorcycle fall behavior: influence of a simple airbag jacket system on rider safety,” Proceeding of 6th International Motorcycle Conference , 2006
work page 2006
-
[10]
The powered two wheelers fall detection using multivariate cumulative sum (mcusum) control charts,
F. Attal, A. Boubezoul, L. Oukhellou, N. Cheifetz, and S. Espi ´e, “The powered two wheelers fall detection using multivariate cumulative sum (mcusum) control charts,” Proceeding of the 17th IEEE International Conference on Intelligent Transportation Systems , 2014
work page 2014
-
[11]
F. Attal, A. Boubezoul, A. Sam ´e, and L. Oukhellou, “Powered-two- wheeler safety critical events recognition using a mixture model with quadratic logistic proportions,” Proceedings of the 23rd European Symposium on Artificial Neural Networks , 2015
work page 2015
-
[12]
Critical power two wheeler driving patterns at the emergence of an incident,
E. I. Vlahogianni, G. Yannis, and J. C. Golias, “Critical power two wheeler driving patterns at the emergence of an incident,” Accident Analysis & Prevention , 2013
work page 2013
-
[13]
De Cock, Principal angles in system theory, information theory and signal processing
K. De Cock, Principal angles in system theory, information theory and signal processing . Ph.D. thesis, 2002
work page 2002
-
[14]
Roll angle estimation in two-wheeled vehicles,
I. Boniolo, S. M. Savaresi, and M. Tanelli, “Roll angle estimation in two-wheeled vehicles,” IET Control Theory & Applications , 2009
work page 2009
-
[15]
Self-calibration algorithm for an imu in two-wheeled vehicles: design and experimental validation,
S. Gelmini, M. Fouka, S. Strada, M. Tanelli, S. Savaresi, and C. De Tommasi, “Self-calibration algorithm for an imu in two-wheeled vehicles: design and experimental validation,” Proceeding of the 21st IEEE International Conference on Intelligent Transportation Systems , 2018
work page 2018
-
[16]
Detecting powered- two-wheeler incidents from high resolution naturalistic data,
E. I. Vlahogianni, G. Yannis, and J. C. Golias, “Detecting powered- two-wheeler incidents from high resolution naturalistic data,” Trans- portation research part F: traffic psychology and behaviour , 2014
work page 2014
-
[17]
B. P. Bogert, M. J. Healy, and J. W. Tukey, “The quefrency analysis of time series for echoes: cepstrum, pseudo-autocovariance, cross- cepstrum and saphe cracking,” Proceedings of the Symposium on Time Series Analysis, 1963
work page 1963
-
[18]
Distance measures for effective clustering of arima time-series,
K. Kalpakis, D. Gada, and V . Puttagunta, “Distance measures for effective clustering of arima time-series,” Proceedings of the IEEE International Conference on Data Mining , 2001
work page 2001
-
[19]
A frequency domain method for blind source separation of convolutive audio mixtures,
K. Rahbar and J. Reilly, “A frequency domain method for blind source separation of convolutive audio mixtures,” IEEE Transactions on Speech and Audio Processing , 2005
work page 2005
-
[20]
R. J. Martin, “A metric for ARMA processes,” IEEE transactions on Signal Processing, 2000
work page 2000
-
[21]
O. Lauwers and B. De Moor, “A time series distance measure for efficient clustering of input/output signals by their underlying dynamics,” IEEE Control Systems Letters , 2017
work page 2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.