Recognition: 2 theorem links
· Lean TheoremEstimating Dense-Packed Zone Height in Liquid-Liquid Separation: A Physics-Informed Neural Network Approach
Pith reviewed 2026-05-16 10:53 UTC · model grok-4.3
The pith
A two-stage trained physics-informed neural network estimates dense-packed zone height in liquid-liquid separators using only flow measurements after pretraining on synthetic data.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
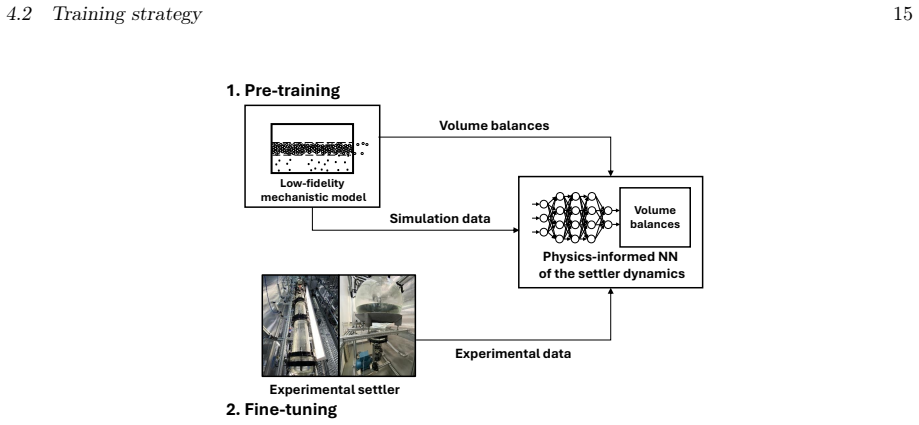
By pretraining a PINN on synthetic data from volume balance equations derived from a low-fidelity model and then fine-tuning it with scarce experimental phase height and flow-rate data, the model can be deployed in an Extended Kalman Filter inspired framework to accurately estimate dense-packed zone heights using only readily available flow measurements, outperforming other models in all evaluations.
What carries the argument
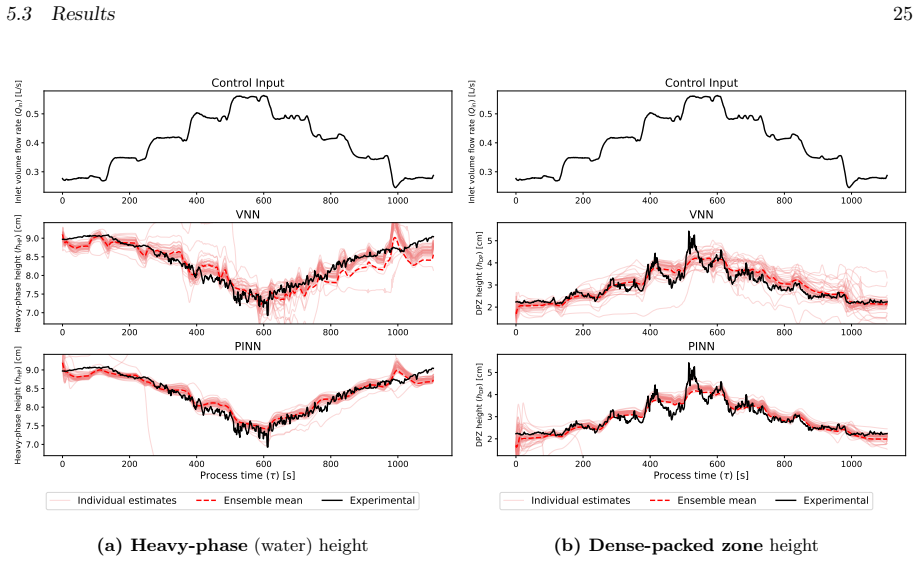
The two-stage trained physics-informed neural network that enforces volume balance equations as soft constraints and is embedded in an Extended Kalman Filter inspired state estimation framework for online tracking.
If this is right
- The PINN enables continuous height tracking without optical or direct sensors during operation.
- Pretraining on synthetic data from the mechanistic model reduces the amount of experimental data required for deployment.
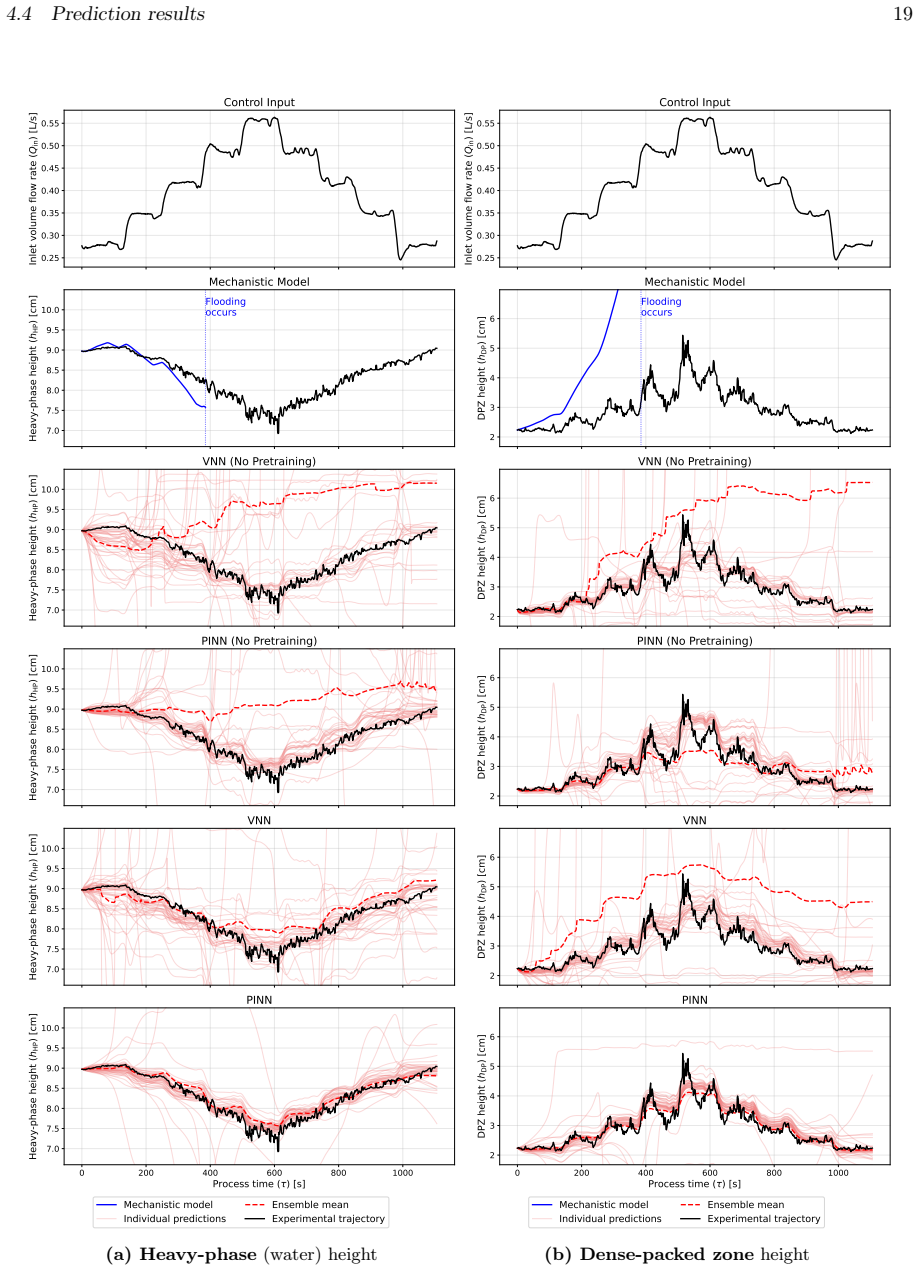
- The two-stage PINN outperforms both non-pretrained PINNs and purely data-driven networks in phase-height estimation accuracy.
- Ensemble training of all models provides a way to quantify uncertainty in the estimates.
Where Pith is reading between the lines
- The same pretrain-then-fine-tune pattern could apply to other chemical engineering unit operations where full physics models are too expensive but partial balances are available.
- Embedding the differentiable PINN in the filter opens the possibility of using the estimates for real-time process optimization or fault detection.
- If faster computers become available, adding coalescence and sedimentation terms to the PINN loss could further reduce reliance on experimental fine-tuning.
Load-bearing premise
Volume balance equations alone, without droplet coalescence or sedimentation details, suffice for the fine-tuned PINN to capture actual separator dynamics.
What would settle it
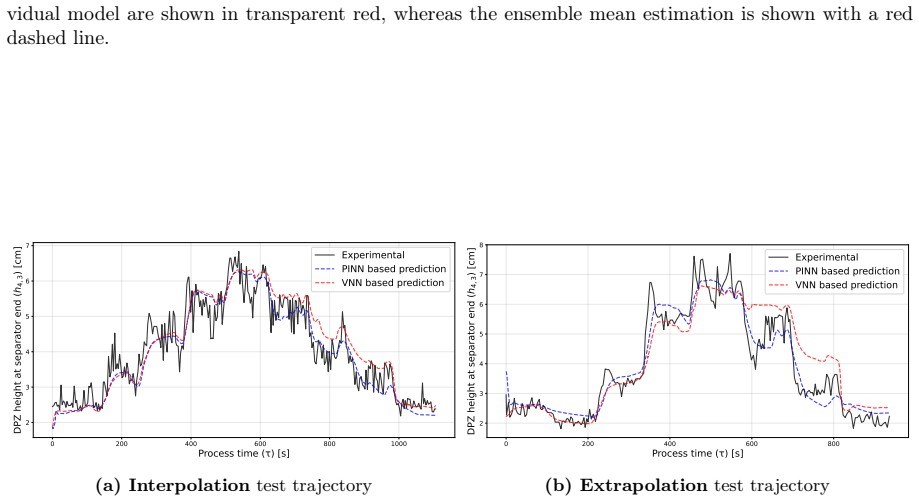
New experiments on a separator with different operating conditions where the PINN height estimates deviate substantially from independent measurements would falsify the accuracy claim.
Figures









read the original abstract
Separating liquid-liquid dispersions in gravity settlers is critical in chemical, pharmaceutical, and recycling processes. The dense-packed zone height is an important performance and safety indicator but it is often expensive and impractical to measure due to optical limitations. We propose a framework to estimate phase heights by combining a PINN model with readily available volume flow measurements, without requiring phase height measurements during deployment. To this end, a physics-informed neural network (PINN) is first pretrained on synthetic data and physics equations derived from a low-fidelity (approximate) mechanistic model to reduce the need for extensive experimental data. While the mechanistic model is used to generate synthetic training data, only volume balance equations are used in the PINN, as incorporating droplet coalescence and sedimentation submodels would be computationally prohibitive. The pretrained PINN is then fine-tuned with scarce experimental phase height and flow-rate data to capture the actual dynamics of the separator. We then deploy the differentiable PINN as a predictive model in an Extended Kalman Filter inspired state estimation framework, enabling the phase heights to be tracked and updated using flow-rate measurements only. We first test the two-stage trained PINN by forward simulation from a known initial state against the mechanistic model and a non-pretrained PINN. We then evaluate phase height estimation performance with the filter, comparing the two-stage trained PINN with a two-stage trained purely data-driven neural network. All model types are trained and evaluated using ensembles to account for model parameter uncertainty. In all evaluations, the two-stage trained PINN yields the most accurate phase-height estimates.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a two-stage PINN framework to estimate dense-packed zone height in liquid-liquid gravity settlers. A PINN is pretrained on synthetic data generated by a low-fidelity mechanistic model subject to volume-balance physics constraints, then fine-tuned on scarce experimental phase-height and flow-rate pairs. The resulting differentiable model is embedded in an EKF-style estimator that updates height predictions from flow measurements alone. Ensemble training is used throughout. The central claim is that the two-stage PINN produces the most accurate forward-simulation and filtering results compared with the mechanistic model and a purely data-driven NN.
Significance. If the quantitative superiority is confirmed with proper metrics and out-of-distribution tests, the work would demonstrate a practical route for hybrid modeling under data scarcity: approximate physics for pretraining plus limited real observations for fine-tuning, followed by deployment inside a differentiable filter. Such an approach could reduce reliance on expensive instrumentation in chemical and recycling processes while still respecting conservation laws.
major comments (3)
- [Abstract and §4] Abstract and §4 (Results): the claim that the two-stage PINN 'yields the most accurate phase-height estimates' is unsupported by any reported RMSE, MAE, or coverage metrics, validation plots, or statistical tests on the ensemble members. Without these numbers it is impossible to judge whether the reported superiority is practically meaningful or merely within noise.
- [§3.2 and §2] §3.2 (PINN formulation) and §2 (Mechanistic model): the physics loss contains only volume-balance equations; coalescence and sedimentation submodels are omitted. Because the synthetic pretraining data are generated by the same low-fidelity model whose balances later appear in the loss, the training loop risks circularity. The manuscript must show, via an ablation that replaces the mechanistic pretraining with random initialization or a different generator, that the fine-tuning stage actually learns dynamics beyond the approximate model.
- [§4.2] §4.2 (EKF evaluation): the filtering experiments compare the two-stage PINN only against a two-stage data-driven NN. A direct comparison against the low-fidelity mechanistic model run inside the same EKF (with appropriate process noise) is missing; such a baseline would clarify whether the neural component adds value beyond the volume balances already present in the physics loss.
minor comments (2)
- [§3] Notation for the dense-packed zone height (h_d) and the light-phase height should be introduced once and used consistently; several paragraphs switch between symbols without explicit redefinition.
- [Figures 3–5] Figure captions for the ensemble trajectories should report the number of members and the plotted quantiles (e.g., median and 5–95 % bands) rather than generic 'mean ± std'.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments. We address each major point below and will make the indicated revisions to strengthen the manuscript.
read point-by-point responses
-
Referee: [Abstract and §4] Abstract and §4 (Results): the claim that the two-stage PINN 'yields the most accurate phase-height estimates' is unsupported by any reported RMSE, MAE, or coverage metrics, validation plots, or statistical tests on the ensemble members. Without these numbers it is impossible to judge whether the reported superiority is practically meaningful or merely within noise.
Authors: We agree that the manuscript relies primarily on visual comparisons in the figures without tabulated numerical metrics or statistical tests on the ensembles. This omission makes it difficult to assess practical significance. In the revised version we will add a results table reporting RMSE, MAE, and ensemble coverage (e.g., 95% interval coverage) for forward simulation and filtering tasks, together with paired statistical tests (e.g., Wilcoxon signed-rank) on the ensemble members to quantify whether observed differences are significant. revision: yes
-
Referee: [§3.2 and §2] §3.2 (PINN formulation) and §2 (Mechanistic model): the physics loss contains only volume-balance equations; coalescence and sedimentation submodels are omitted. Because the synthetic pretraining data are generated by the same low-fidelity model whose balances later appear in the loss, the training loop risks circularity. The manuscript must show, via an ablation that replaces the mechanistic pretraining with random initialization or a different generator, that the fine-tuning stage actually learns dynamics beyond the approximate model.
Authors: The concern about circularity is valid: although the PINN loss uses only volume-balance equations, the pretraining data are generated by the same low-fidelity simulator. To demonstrate that the two-stage procedure learns additional dynamics, we will include an ablation study in the revision. Specifically, we will train an otherwise identical PINN from random initialization (no mechanistic pretraining), fine-tune it on the experimental data, and compare its forward-simulation and filtering accuracy against the proposed two-stage PINN using the same ensemble protocol and metrics. revision: yes
-
Referee: [§4.2] §4.2 (EKF evaluation): the filtering experiments compare the two-stage PINN only against a two-stage data-driven NN. A direct comparison against the low-fidelity mechanistic model run inside the same EKF (with appropriate process noise) is missing; such a baseline would clarify whether the neural component adds value beyond the volume balances already present in the physics loss.
Authors: We concur that embedding the low-fidelity mechanistic model directly in the EKF (with process noise calibrated to the ensemble variance) provides an important baseline. The original evaluation compared only neural variants. In the revision we will add this baseline to §4.2, reporting the same RMSE/MAE/coverage metrics for the mechanistic EKF and discussing the incremental benefit (if any) provided by the learned PINN component. revision: yes
Circularity Check
Pretraining on synthetic data and volume-balance physics from the same low-fidelity mechanistic model creates moderate circularity when forward-simulating against that model
specific steps
-
fitted input called prediction
[Abstract (pretraining and forward-simulation evaluation)]
"a physics-informed neural network (PINN) is first pretrained on synthetic data and physics equations derived from a low-fidelity (approximate) mechanistic model to reduce the need for extensive experimental data. While the mechanistic model is used to generate synthetic training data, only volume balance equations are used in the PINN... We first test the two-stage trained PINN by forward simulation from a known initial state against the mechanistic model and a non-pretrained PINN."
Synthetic training data and the volume-balance physics loss both originate from the mechanistic model. The forward-simulation test then measures how well the PINN reproduces trajectories from that same model, so the accuracy advantage is partly by construction rather than an independent check of generalization.
full rationale
The paper's two-stage training pretrains the PINN on synthetic trajectories generated by the mechanistic model while enforcing volume-balance equations derived from the same model. Forward-simulation tests then compare the PINN output directly to the mechanistic model's trajectories. This setup makes the reported superiority in that evaluation statistically forced by the shared source of data and constraints, even though fine-tuning on experimental data and comparison to a data-driven NN add partial independence. No self-citations, uniqueness theorems, or ansatz smuggling are present; the circularity is limited to the pretraining-evaluation loop on the synthetic source.
Axiom & Free-Parameter Ledger
free parameters (1)
- PINN weights and biases
axioms (1)
- domain assumption Volume balance equations govern phase height evolution
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
only volume balance equations are used in the PINN, as incorporating droplet coalescence and sedimentation submodels would be computationally prohibitive
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
two-stage training procedure for PINNs involving a low-fidelity physics model for pretraining and high-fidelity data for fine-tuning
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Backi, C.J., Grimes, B.A., Skogestad, S.,
doi:10.1016/j.engappai.2021.104195. Backi, C.J., Grimes, B.A., Skogestad, S.,
-
[2]
Industrial and Engineering Chemistry Research 57, 7201–7217
A Control- and Estimation-Oriented Gravity Separator Model for Oil and Gas Applications Based upon First-Principles. Industrial and Engineering Chemistry Research 57, 7201–7217. doi:10.1021/acs.iecr.7b04297. BIBLIOGRAPHY 33 Breiman, L.,
-
[3]
Stacked regressions. Machine Learning 24, 49–64. doi:10.1007/BF00117832. Bucy, R.S., Joseph, P.D.,
-
[4]
American Mathematical Soc. doi:10.1109/TAC.1972.1099917. Chakraborty, S.,
-
[5]
Cuomo, S., Rosa, M.D., Piccialli, F., Pompameo, L.,
doi:10.1016/j.jcp.2020.109942. Cuomo, S., Rosa, M.D., Piccialli, F., Pompameo, L.,
-
[6]
Mathematics and Computers in Simulation 223, 368–379
Railway safety through predictive vertical displacement analysis using the pinn-ekf synergy. Mathematics and Computers in Simulation 223, 368–379. doi:10.1016/j.matcom.2024.04.026. de Curtò, J., de Zarzà, I.,
- [7]
-
[8]
URL:https://www.hydrocarbonprocessing.com/magazine/2009/june-2009/ special-report-processplant-optimization/rethink-your-liquid-liquid-separations/. Ac- cessed on 23.09.2025. Dietterich, T.G.,
work page 2009
-
[9]
Ensemble methods in machine learning, in: International Workshop on Multiple Classifier Systems, Springer. pp. 1–15. doi:10.1007/3-540-45014-9_1. Du, S.S., Lee, J.D., Li, H., Wang, L., Zhai, X.,
-
[10]
Gradient Descent Finds Global Minima of Deep Neural Networks
Gradient descent finds global minima of deep neural networks. arXiv preprintarXiv:1811.03804. Fang, S., Yu, K.,
work page internal anchor Pith review Pith/arXiv arXiv
-
[11]
Journal of Dispersion Science and Technology 27, 1035–1057
The liquid/liquid sedimentation process: From droplet coalescence to technologically enhanced water/oil emulsion gravity separators: A review. Journal of Dispersion Science and Technology 27, 1035–1057. doi:10.1080/01932690600767098. Gelb, A., Kasper, J.F., Nash, R.A., Price, C.F., Sutherland, A.A. (Eds.),
-
[12]
Chemical Engineering Journal 85, 369–378
Determination of a coalescence parameter from batch-settling experiments. Chemical Engineering Journal 85, 369–378. doi:10.1016/S1385-8947(01)00251-0. Iman, R.L., Helton, J.C., Campbell, J.E.,
-
[13]
Journal of Quality Technology 13, 174–183
An Approach to Sensitivity Analysis of Computer Models: Part I—Introduction, Input Variable Selection and Preliminary Variable Assessment. Journal of Quality Technology 13, 174–183. doi:10.1080/00224065.1981.11978748. Jeelani, S.A.K., Hartland, S.,
-
[14]
Dynamic response of gravity settlers to changes in dispersion through- put. AIChE Journal 34, 335–340. doi:10.1002/aic.690340220. Julier, S., Uhlmann, J.,
-
[15]
Proceedings of the IEEE 92, 401–422
Unscented filtering and nonlinear estimation. Proceedings of the IEEE 92, 401–422. doi:10.1109/JPROC.2003.823141. Kalman, R.E.,
-
[16]
A New Approach to Linear Filtering and Prediction Problems. Journal of Basic Engineering 82, 35–45. doi:10.1115/1.3662552. Kamp, J., Villwock, J., Kraume, M.,
-
[17]
Reviews in Chemical Engineering 33, 1–47
Drop coalescence in technical liquid/liquid applications: a review on experimental techniques and modeling approaches. Reviews in Chemical Engineering 33, 1–47. doi:10.1515/revce-2015-0071. Kampwerth, J., Weber, B., Rußkamp, J., Kaminski, S., Jupke, A.,
-
[18]
Chemical Engineering Science 227, 115905
Towards a holistic solvent screening: On the importance of fluid dynamics in a rate-based extraction model. Chemical Engineering Science 227, 115905. doi:10.1016/j.ces.2020.115905. Kingma, D.P., Ba, J.,
-
[19]
Adam: A Method for Stochastic Optimization
Adam: A method for stochastic optimization. arXiv preprint arXiv:1412.6980. Kraume, M., Gäbler, A., Schulze, K.,
work page internal anchor Pith review Pith/arXiv arXiv
-
[20]
Chemical Engineering & Technology 27, 330–334
Influence of physical properties on drop size distribution of stirred liquid-liquid dispersions. Chemical Engineering & Technology 27, 330–334. doi:10.1002/ceat. 200402006. Liu, D.C., Nocedal, J.,
-
[21]
Math- ematical programming 45, 503–528
On the limited memory BFGS method for large scale optimization. Math- ematical programming 45, 503–528. doi:10.1007/BF01589116. BIBLIOGRAPHY 35 Maddu, S., Sturm, D., Müller, C.L., Sbalzarini, I.F.,
-
[22]
Machine Learning: Science and Technology 3, 015026
Inverse Dirichlet weighting enables reliable training of physics informed neural networks. Machine Learning: Science and Technology 3, 015026. doi:10.1088/2632-2153/ac3712. Markidis, S.,
-
[23]
doi:10.3389/fdata.2021.669097. Mersmann, A.,
-
[24]
Chemie Ingenieur Technik 52, 933–942
Zum flutpunkt in flüssig/flüssig–gegenstromkolonnen. Chemie Ingenieur Technik 52, 933–942. doi:10.1002/cite.330521203. Mohamed, A., Schwarz, K.,
-
[25]
Journal of Geodesy 73, 193–203
Adaptive Kalman filtering for INS/GPS. Journal of Geodesy 73, 193–203. doi:10.1007/s001900050236. Mustajab, A.H., Lyu, H., Rizvi, Z., Wuttke, F.,
-
[26]
arXiv preprintarXiv:2401.02810
Physics-informedneuralnetworksforhigh-frequency and multi-scale problems using transfer learning. arXiv preprintarXiv:2401.02810. Naumann, U.,
-
[27]
Society for Industrial and Applied Mathematics
The Art of Differentiating Computer Programs. Society for Industrial and Applied Mathematics. doi:10.1137/1.9781611972078. Padilla, R., Ruiz, M., Trujillo, W.,
-
[28]
Chemical Engineering Journal Advances 22, 100727
Towards the digital extraction column: Online-monitoringandanalysisoffluiddynamicsinliquid-liquidextractioncolumns. Chemical Engineering Journal Advances 22, 100727. doi:10.1016/j.ceja.2025.100727. Prantikos, K., Chatzidakis, S., Tsoukalas, L.H., Heifetz, A.,
-
[29]
Raissi, M., Perdikaris, P., Karniadakis, G.E.,
doi:10.1038/s41598-023-43325-1. Raissi, M., Perdikaris, P., Karniadakis, G.E.,
-
[30]
Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations. Journal of Computational Physics 378, 686–707. doi:10.1016/j.jcp.2018.10.045. Redmon, J., Divvala, S., Girshick, R., Farhadi, A.,
-
[31]
You only look once: Unified, real-time object detection, in: 29th IEEE Conference on Computer Vision and Pattern Recognition, IEEE, Piscataway, NJ. pp. 779–788. doi:10.1109/CVPR.2016.91. BIBLIOGRAPHY 36 Shlezinger, N., Whang, J., Eldar, Y.C., Dimakis, A.G.,
-
[32]
arXiv preprint arXiv:2012.08405
Model-based deep learning. arXiv preprint arXiv:2012.08405. Sibirtsev, S., Thiel, L., Zhai, S., Cai, Y.T., Recke, L., Jupke, A.,
-
[33]
The Canadian Journal of Chemical Engineering doi:10.1002/cjce.25563
Experimental and model–based investigation of the droplet size distribution during the mixing process in a batch–settling cell. The Canadian Journal of Chemical Engineering doi:10.1002/cjce.25563. Sibirtsev, S., Zhai, S., Neufang, M., Seiler, J., Jupke, A.,
-
[34]
Chemical Engineering Journal 473, 144826
Mask r-cnn based droplet detection in liquid–liquid systems, part 2: Methodology for determining training and image processing parameter values improving droplet detection accuracy. Chemical Engineering Journal 473, 144826. doi:10.1016/ j.cej.2023.144826. Tan, C., Cai, Y., Wang, H., Sun, X., Chen, L.,
-
[35]
Velioglu, M., Zhai, S., Rupprecht, S., Mitsos, A., Jupke, A., Dahmen, M.,
doi:10.3390/s23156665. Velioglu, M., Zhai, S., Rupprecht, S., Mitsos, A., Jupke, A., Dahmen, M.,
-
[36]
Computers & Chemical Engineering 192, 108899
Physics-informed neural networks for dynamic process operations with limited physical knowledge and data. Computers & Chemical Engineering 192, 108899. doi:10.1016/j.compchemeng.2024.108899. Wackerly, D., Mendenhall, W., Scheaffer, R.L.,
-
[37]
Mathematical Statistics with Applications. 7th ed., Brooks/Cole. Wang, Y., Bai, J., Eshaghi, M.S., Anitescu, C., Zhuang, X., Rabczuk, T., Liu, Y., 2025a. Transfer learning in physics-informed neural networks: Full fine-tuning, lightweight fine-tuning, and low-rank adaptation. arXiv preprintarXiv:2502.00782. Wang, Y., del Río Chanona, E.A., Quintanilla, P....
-
[38]
Chemical Engineering Science 285, 119611
Impact of feeding conditions on continuous liquid-liquid gravity separation, part ii: Inlet/outlet drop size distribution and fractional separation efficiency. Chemical Engineering Science 285, 119611. doi:10.1016/j.ces.2023.119611. Zhai, S., Bartkowiak, N., Sibirtsev, S., Jupke, A.,
-
[39]
Separation and Purification Technology 377, 134177
Experimental determination and model-based prediction of flooding points in a pilot-scale continuous liquid-liquid gravity separator. Separation and Purification Technology 377, 134177. doi:10.1016/j.seppur.2025.134177. Zhang, L., Sidoti, D., Bienkowski, A., Pattipati, K.R., Bar-Shalom, Y., Kleinman, D.L.,
-
[40]
On the identification of noise covariances and adaptive Kalman filtering: A new look at a 50 year-old problem. IEEE Access 8, 59362–59388. doi:10.1109/ACCESS.2020.2982407. Zhao, W., Queralta, J.P., Westerlund, T.,
-
[41]
Sim-to-real transfer in deep reinforcement learning for robotics: a survey, in: 2020 IEEE Symposium Series on Computational Intelligence (SSCI), pp. 737–744. doi:10.1109/SSCI47803.2020.9308468
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.