D³-Subsidy: Online and Sequential Driver Subsidy Decision-Making for Large-Scale Ride-Hailing Market
Pith reviewed 2026-05-22 09:13 UTC · model grok-4.3
The pith
A diffusion-based controller plans driver subsidies online for ride-hailing at city scale while meeting caps and raising rides plus GMV.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
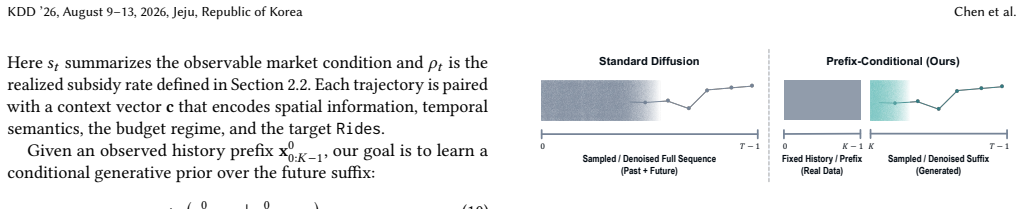
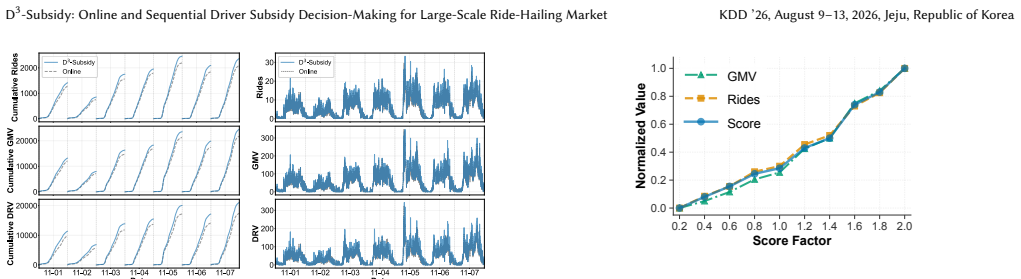
D³-Subsidy employs a prefix-conditioned diffusion model to sample plausible future trajectories from immutable historical observations, ensuring alignment between training and online deployment, then decodes the plans via a context-conditioned inverse module into low-dimensional city-level signals and applies a Lagrangian-dual-derived mapping to embed subsidy-rate caps into fine-grained order-driver incentives without iterative optimization; offline evaluations show gains in Rides and GMV plus better cap compliance, while a real-world A/B test confirms significant uplift with budget-related violations kept inside operational thresholds.
What carries the argument
Prefix-conditioned diffusion model that samples future subsidy trajectories from fixed history, decoded by a context-conditioned inverse module and realized through a Lagrangian-dual mapping that enforces subsidy caps directly in incentives.
If this is right
- Supports low-latency city-wide subsidy decisions without solving expensive per-order optimizations at every step.
- Delivers measurable increases in completed rides and gross merchandise value under real operating constraints.
- Improves adherence to subsidy-rate caps while keeping budget-related violations within acceptable limits.
- Allows knowledge transfer to new cities through multi-city pretraining followed by parameter-efficient fine-tuning.
Where Pith is reading between the lines
- The same trajectory-sampling plus dual-mapping structure could be tested on incentive design in other two-sided marketplaces facing stochastic supply-demand imbalances.
- Replacing the diffusion component with alternative sequence models might reveal whether the performance gains depend on the specific generative mechanism or on the hierarchical planning setup.
- The method offers a template for embedding hard constraints into learned planners for sequential resource allocation outside transportation.
Load-bearing premise
The prefix-conditioned diffusion model produces future trajectories whose distribution matches the actual outcomes that arise when only immutable historical observations are available at decision time.
What would settle it
A live deployment in which subsidy plans generated by the diffusion model produce no net gain in completed rides or GMV relative to simpler baselines while causing subsidy-rate cap violations to exceed operational thresholds.
Figures










read the original abstract
Ride-hailing platforms like DiDi Chuxing operate in highly dynamic environments where balancing driver supply and passenger demand is critical. Although driver-side subsidies serve as a primary lever to align these forces and improve key KPIs like completed rides (\texttt{Rides}) and gross merchandise value (\texttt{GMV}), optimizing them in production requires simultaneously meeting three constraints: (i) responsiveness to stochastic shocks, (ii) strict subsidy-rate caps, and (iii) low-latency execution at city scale. These requirements rule out expensive per-order optimization, calling for a forward-looking, constraint-aware city-level controller for online sequential decision making. To meet these requirements, we introduce D$^3$-Subsidy (Dynamic Driver-side Diffusion-based Subsidy), a hierarchical diffusion-based framework for deployable city-wide subsidy control. To bridge the train-inference gap, D$^3$-Subsidy employs a prefix-conditioned diffusion model that samples plausible future trajectories from immutable historical observations, ensuring the training protocol aligns with the fixed-history nature of online deployment. These generated plans are then decoded by a context-conditioned inverse module into low-dimensional city-level control signals. For scalable execution, we bridge the gap between city-level planning and fine-grained dispatch via a Lagrangian-dual-derived mapping, which embeds subsidy-rate caps directly into order-driver incentives without iterative optimization. Additionally, a multi-city pretraining strategy with parameter-efficient fine-tuning enables robust transfer across heterogeneous cities. Extensive offline evaluations demonstrate that D$^3$-Subsidy improves \texttt{Rides} and \texttt{GMV} while enhancing cap compliance, and a real-world A/B test confirms significant uplift while keeping budget-related violation metrics within operational thresholds.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces D³-Subsidy, a hierarchical diffusion-based controller for online sequential driver subsidy decisions in large-scale ride-hailing platforms. It employs a prefix-conditioned diffusion model to sample future trajectories from immutable historical observations, decodes them via a context-conditioned inverse module into city-level signals, and applies a Lagrangian-dual mapping to enforce subsidy-rate caps at the order level. The central claims are that the method improves Rides and GMV, enhances cap compliance, and that these gains are confirmed by extensive offline evaluations plus a real-world A/B test that keeps budget-violation metrics within operational thresholds. Multi-city pretraining with parameter-efficient fine-tuning is used to enable transfer across heterogeneous cities.
Significance. If the performance claims and the train-inference alignment hold, the work provides a deployable, low-latency solution for constraint-aware sequential control at city scale, which is practically relevant for ride-hailing operations. The combination of generative trajectory modeling with Lagrangian embedding of hard caps is a concrete engineering contribution; the reported real-world A/B test and multi-city transfer results constitute positive evidence of external validity that is uncommon in this domain.
major comments (2)
- [§3.2] §3.2 (Prefix-conditioned diffusion model): The load-bearing claim that prefix conditioning on immutable historical observations produces future trajectories whose distribution matches the fixed-history input available at deployment time is asserted but not quantitatively validated. No distribution-alignment metrics (e.g., MMD, Wasserstein distance, or predictive log-likelihood on held-out fixed-prefix rollouts) are reported to confirm that the stochastic shocks and non-stationarities seen in training match those encountered online; without such evidence the downstream city-level decoding and Lagrangian mapping cannot be guaranteed to deliver the claimed Rides/GMV gains.
- [§5] §5 (Offline evaluations and A/B test): The abstract and results sections assert statistically significant uplift in Rides and GMV together with improved cap compliance, yet the manuscript supplies neither the exact numerical deltas, confidence intervals, baseline algorithms, nor the A/B test design details (randomization unit, duration, traffic split). These omissions prevent independent verification that the observed improvements are attributable to the diffusion-based controller rather than confounding factors.
minor comments (2)
- [§4] Notation for the Lagrangian multiplier and the subsidy-rate cap constraint is introduced without an explicit equation reference in the main text; adding a numbered equation for the dual problem would improve traceability.
- [Figures 2-3] Figure captions for the trajectory sampling and city-level decoding diagrams should explicitly state the dimensionality of the latent space and the conditioning prefix length used in experiments.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. We address each major comment point by point below, indicating where we agree and what revisions we will make to the manuscript.
read point-by-point responses
-
Referee: [§3.2] §3.2 (Prefix-conditioned diffusion model): The load-bearing claim that prefix conditioning on immutable historical observations produces future trajectories whose distribution matches the fixed-history input available at deployment time is asserted but not quantitatively validated. No distribution-alignment metrics (e.g., MMD, Wasserstein distance, or predictive log-likelihood on held-out fixed-prefix rollouts) are reported to confirm that the stochastic shocks and non-stationarities seen in training match those encountered online; without such evidence the downstream city-level decoding and Lagrangian mapping cannot be guaranteed to deliver the claimed Rides/GMV gains.
Authors: We agree that explicit quantitative validation of the distribution alignment between training and inference would strengthen the central claim. The prefix-conditioning design is motivated by the need to match the fixed-history input available at deployment, and the observed improvements in both offline evaluations and the real-world A/B test provide supporting evidence. To directly address the concern, we will add distribution-alignment metrics (including MMD and Wasserstein distances on held-out fixed-prefix rollouts) to §3.2 and the experimental section of the revised manuscript. revision: yes
-
Referee: [§5] §5 (Offline evaluations and A/B test): The abstract and results sections assert statistically significant uplift in Rides and GMV together with improved cap compliance, yet the manuscript supplies neither the exact numerical deltas, confidence intervals, baseline algorithms, nor the A/B test design details (randomization unit, duration, traffic split). These omissions prevent independent verification that the observed improvements are attributable to the diffusion-based controller rather than confounding factors.
Authors: We acknowledge that greater specificity in reporting the quantitative results and experimental protocol would improve verifiability. In the revised manuscript we will report the exact numerical deltas and confidence intervals for Rides and GMV, identify the baseline algorithms used in the offline evaluations, and provide additional details on A/B test duration and randomization unit. Certain operational parameters such as exact traffic-split ratios are subject to production confidentiality constraints and cannot be disclosed in full. revision: partial
- Full disclosure of A/B test traffic split ratios, as these constitute proprietary operational information.
Circularity Check
No circularity: framework claims rest on empirical validation, not self-referential derivation
full rationale
The manuscript presents D³-Subsidy as a hierarchical architecture whose core components (prefix-conditioned diffusion for trajectory sampling, inverse decoding, Lagrangian mapping) are introduced as design choices to address stated operational constraints. The performance claims are supported by offline evaluations and a real-world A/B test rather than any closed mathematical derivation. No equations, fitted parameters renamed as predictions, or self-citation chains appear in the provided text that would reduce a result to its own inputs by construction. The distribution-alignment assumption is an explicit modeling hypothesis, not a tautological step. The derivation chain is therefore self-contained and independent of the target outcomes.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
prefix-conditioned diffusion model that samples plausible future trajectories from immutable historical observations... Lagrangian-dual-derived mapping... constraint-aware score
-
IndisputableMonolith/Foundation/ArithmeticFromLogic.leanLogicNat ≃ Nat recovery unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
multi-city pretraining strategy with parameter-efficient fine-tuning
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.