Discovering a Zeta Map Algorithm on Dyck Paths via Mechanistic Interpretability
Pith reviewed 2026-06-29 08:26 UTC · model grok-4.3
The pith
Mechanistic interpretability of a small transformer yields an explicit peak-centered traversal algorithm on Dyck paths that matches the zeta map up to reversal.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
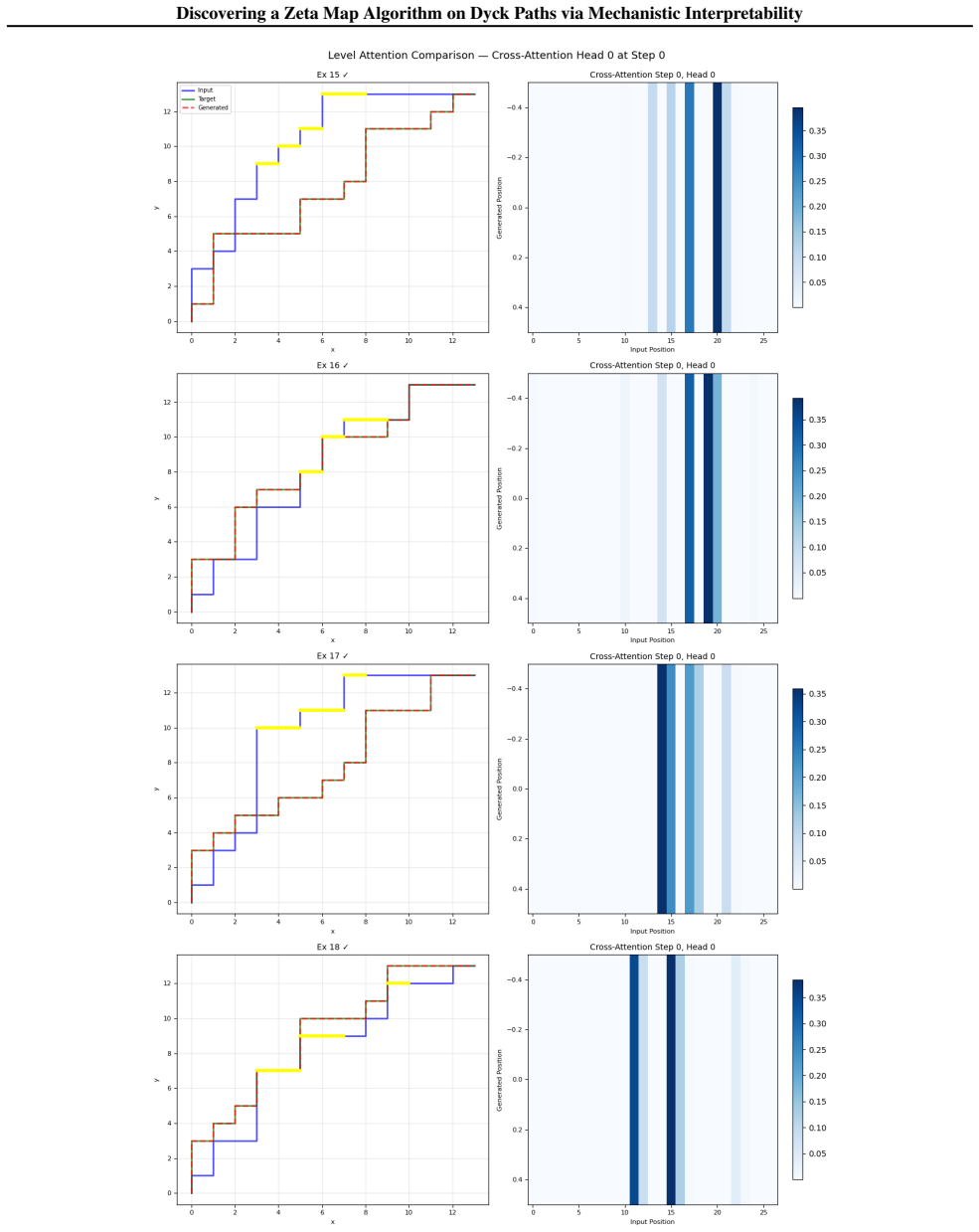
The central claim is that level signals made linearly accessible in the encoder and structured selection performed by decoder cross-attention can be read out as the scaffolding map, a peak-centered traversal algorithm for Dyck paths. The authors prove that this algorithm coincides with the zeta map modulo a reversal convention in the labeling, furnishing an explicit, human-verifiable description of the classical bijection.
What carries the argument
The scaffolding map: an explicit peak-centered traversal algorithm for Dyck paths extracted from level-based transformer signals.
If this is right
- The zeta map admits a direct peak-centered implementation that does not rely on recursion or generating functions.
- Path levels alone suffice to determine the image of any Dyck path under the zeta map.
- The equivalence can be verified by applying both maps to the same finite set of Dyck paths and confirming agreement after the reversal step.
- The bijection is independent of the particular training run once the level signals are extracted.
Where Pith is reading between the lines
- The same extraction procedure could be tried on other Catalan bijections to obtain additional explicit algorithms.
- If the scaffolding map generalizes cleanly, it may simplify proofs that rely on the zeta map by replacing it with a traversal description.
- Testing the map on randomly generated large Dyck paths would provide an independent check outside the model's training distribution.
Load-bearing premise
The level-based signals extracted from the model's encoder and decoder can be translated into a complete combinatorial algorithm whose correctness holds independently of training dynamics and requires no further adjustments.
What would settle it
Any Dyck path on which the scaffolding map, after reversal adjustment, produces an output different from the zeta map.
Figures
read the original abstract
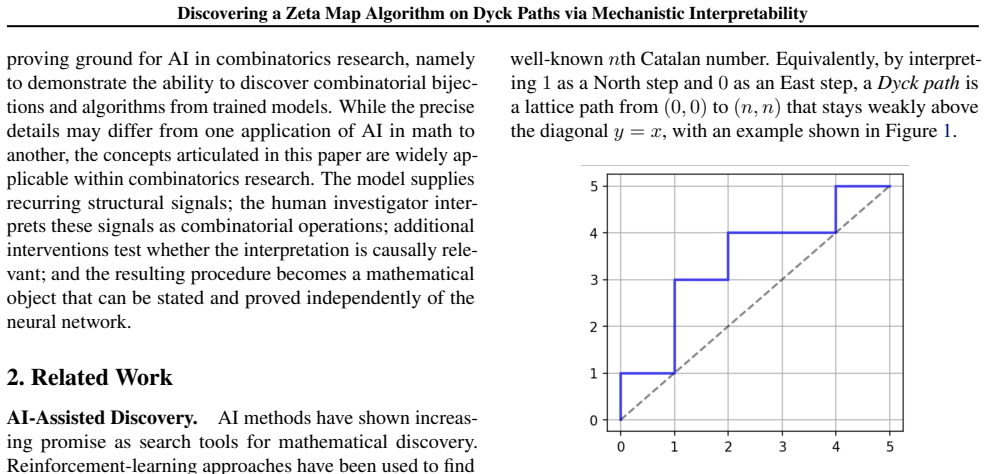
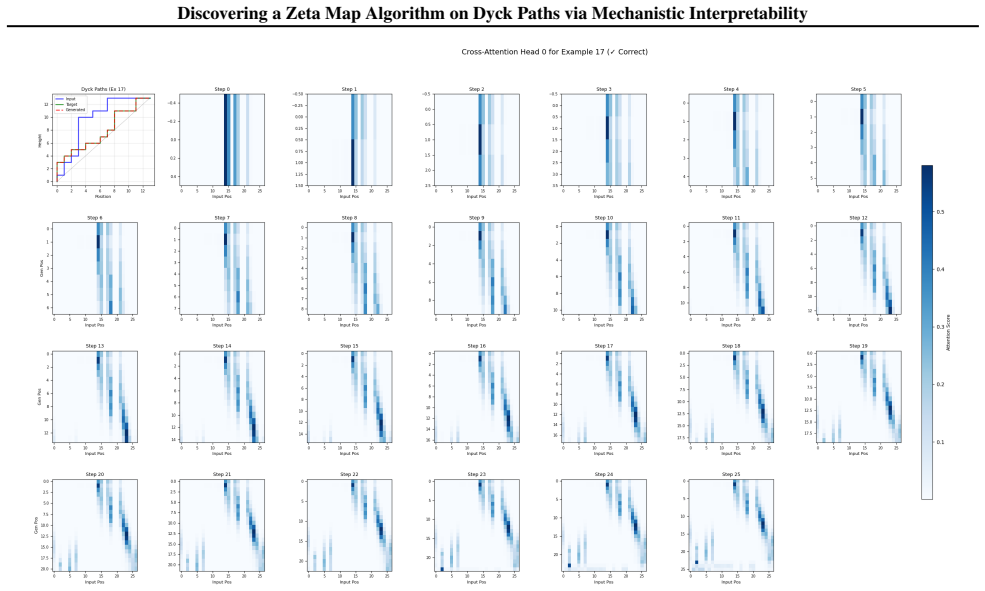
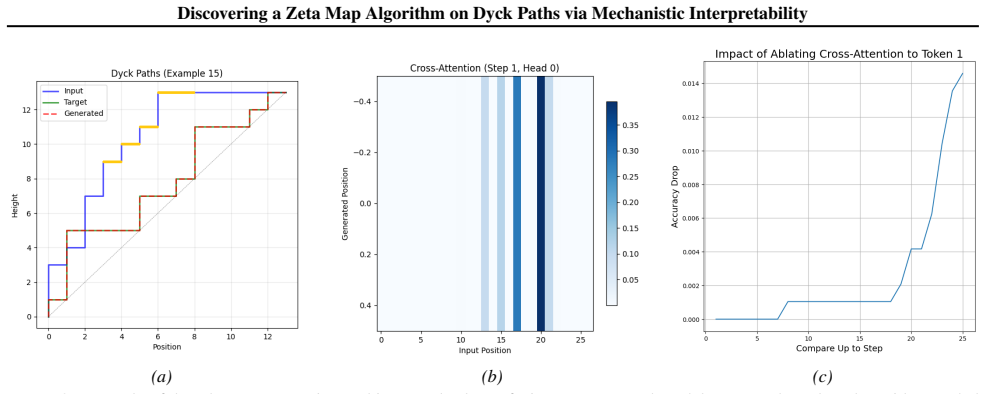
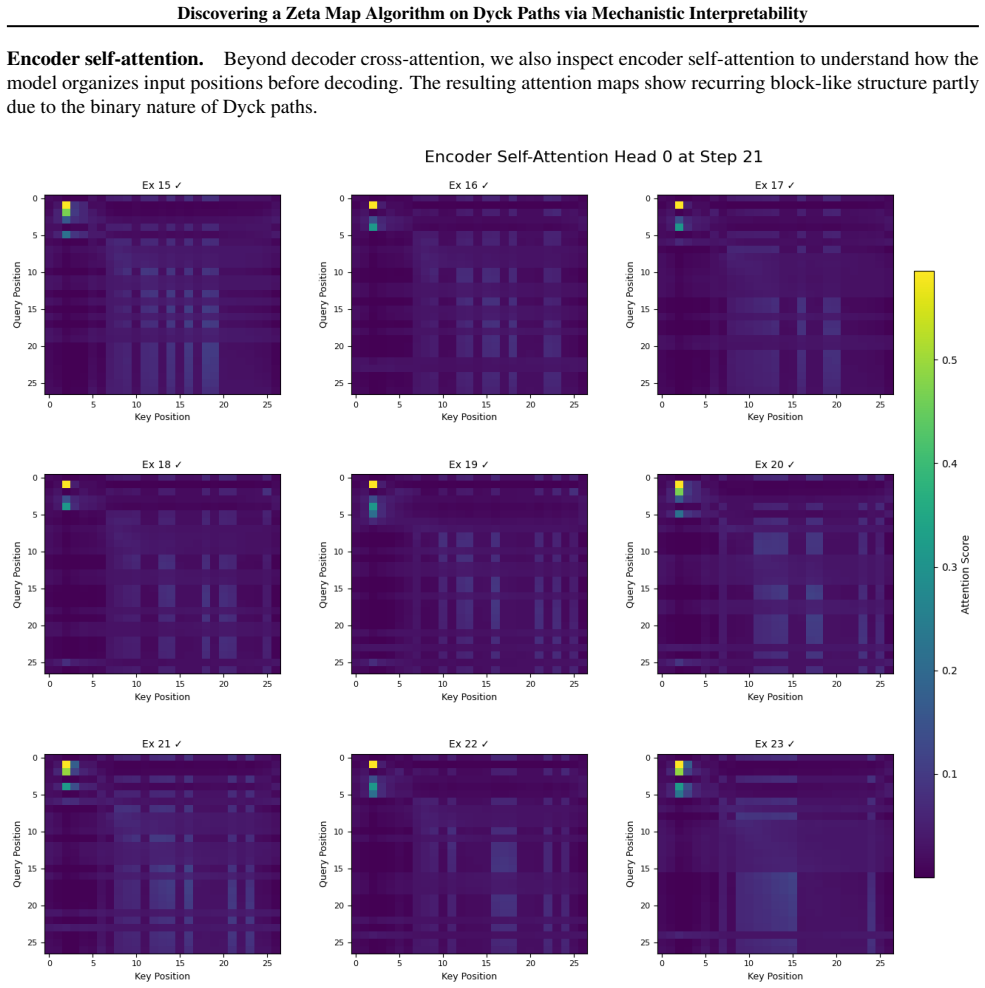
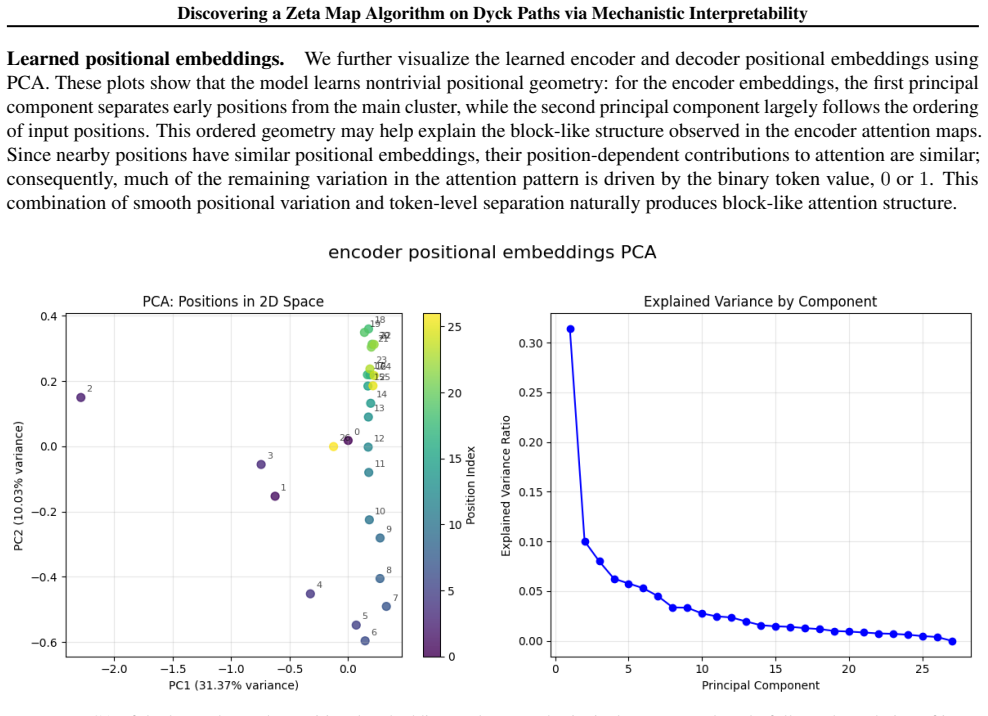
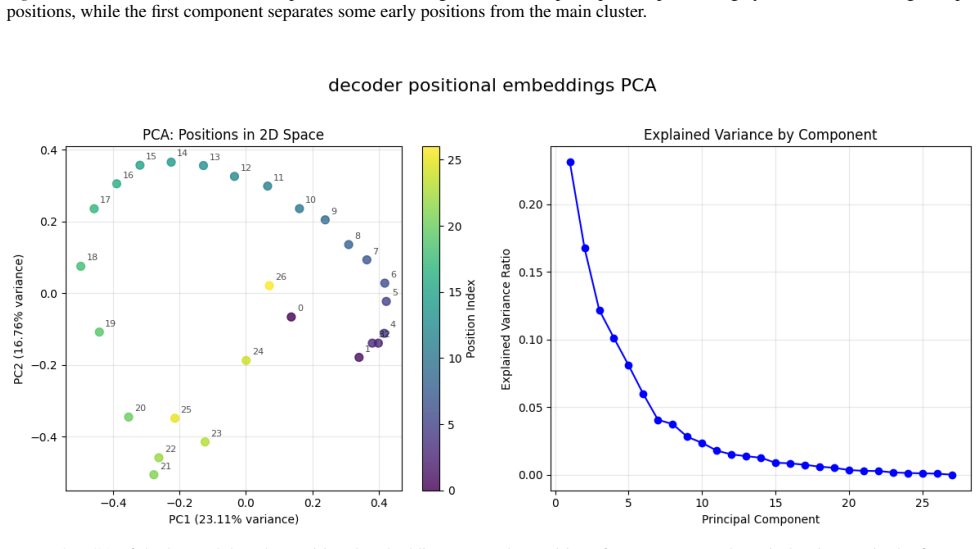
Machine learning is increasingly used in mathematical discovery, but in mathematics the desired output is often not a prediction itself, but an explicit construction that can be checked independently. We study this setting through the zeta map on Dyck paths, a classical bijection in the combinatorics of the q,t-Catalan numbers. We train a deliberately small one-layer, one-head encoder-decoder transformer on this map and analyze its learned computation using mechanistic interpretability tools, including decoder cross-attention analysis, linear probing, and causal intervention. The analysis reveals a level-based mechanism: encoder representations make path levels linearly accessible, while the decoder selects and traverses input positions in a structured way. Translating these signals into combinatorics leads to the scaffolding map, an explicit peak-centered traversal algorithm for Dyck paths. We prove that this algorithm agrees with the zeta map, modulo a reversal convention in the labeling. This gives a controlled example of AI-assisted mathematical discovery in which mechanistic interpretability turns model behavior into a precise, human-verifiable combinatorial algorithm.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
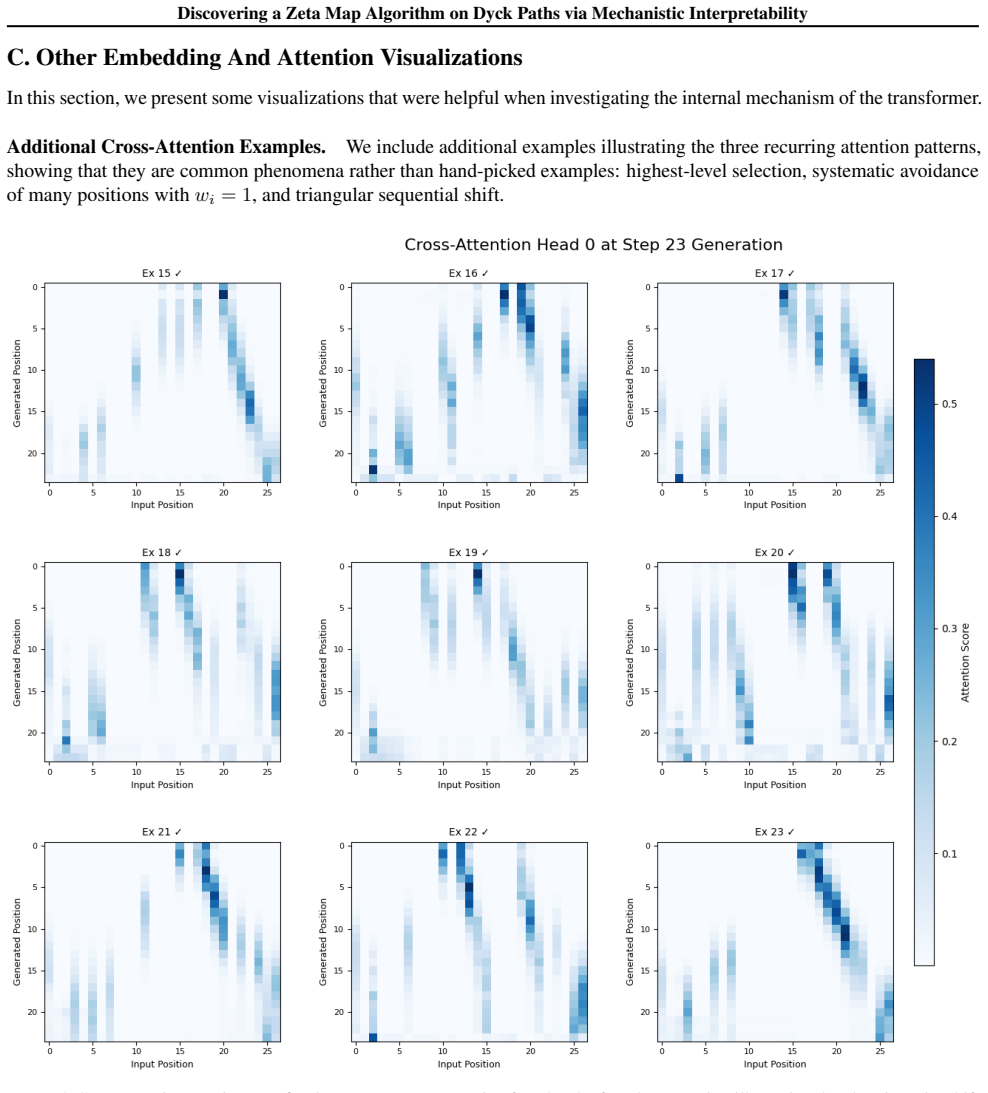
Summary. The paper trains a deliberately small one-layer, one-head encoder-decoder transformer on the zeta map bijection between Dyck paths. Mechanistic interpretability tools (decoder cross-attention, linear probes, causal interventions) are used to identify a level-based mechanism in the encoder representations and decoder selection patterns. These signals are translated into an explicit peak-centered traversal algorithm called the scaffolding map; an independent combinatorial proof is given that this algorithm agrees with the zeta map up to a reversal convention on the labeling.
Significance. If the extraction from model signals to the scaffolding map is shown to be complete and free of unstated human adjustments, the work supplies a controlled, reproducible example of AI-assisted combinatorial discovery in which the final output is an independently verifiable algorithm rather than a fitted predictor. The separation between the interpretability step and the subsequent machine-checkable proof is a methodological strength.
major comments (2)
- [translation from model signals to scaffolding map] The section describing the translation from encoder level signals and decoder cross-attention patterns to the scaffolding map rules does not explicitly enumerate the discretization thresholds, tie-breaking conventions, or rule-formulation steps used to convert continuous activations into the discrete peak-centered traversal. Without this enumeration it is impossible to verify that the algorithm definition is fully entailed by the linear probes and attention weights rather than by additional post-hoc choices.
- [definition of scaffolding map] The claim that the scaffolding map is 'gap-free' and independent of training dynamics rests on the completeness of the extracted traversal rules. The manuscript should supply a case-by-case verification (or a machine-checked enumeration) that every Dyck path is handled by the extracted rules exactly as described, before the equivalence proof begins.
minor comments (2)
- Notation for path levels and peak indices should be introduced once with a small illustrative figure rather than scattered across the interpretability and combinatorial sections.
- [main theorem] The reversal convention on labeling is stated in the abstract and conclusion but should be made explicit in the statement of the main theorem so that readers can check the equivalence without backtracking.
Simulated Author's Rebuttal
We thank the referee for the constructive comments highlighting the need for greater explicitness in the interpretability-to-algorithm pipeline. We address both major points below and will incorporate clarifications and additional verification material in the revision.
read point-by-point responses
-
Referee: [translation from model signals to scaffolding map] The section describing the translation from encoder level signals and decoder cross-attention patterns to the scaffolding map rules does not explicitly enumerate the discretization thresholds, tie-breaking conventions, or rule-formulation steps used to convert continuous activations into the discrete peak-centered traversal. Without this enumeration it is impossible to verify that the algorithm definition is fully entailed by the linear probes and attention weights rather than by additional post-hoc choices.
Authors: We agree that the translation steps require explicit enumeration for full reproducibility. The revised manuscript will add a dedicated subsection that lists: (i) the precise numerical thresholds applied to linear probe outputs for level identification, (ii) all tie-breaking conventions (e.g., left-to-right selection among equal-level peaks), and (iii) the ordered sequence of operations that convert attention patterns into the traversal rules. This addition will document the mapping without post-hoc adjustments beyond what the model signals directly support. revision: yes
-
Referee: [definition of scaffolding map] The claim that the scaffolding map is 'gap-free' and independent of training dynamics rests on the completeness of the extracted traversal rules. The manuscript should supply a case-by-case verification (or a machine-checked enumeration) that every Dyck path is handled by the extracted rules exactly as described, before the equivalence proof begins.
Authors: The independence from training dynamics is justified by the deterministic combinatorial definition of the scaffolding map extracted from the model and the subsequent machine-checkable equivalence proof, which holds for arbitrary Dyck paths. Nevertheless, to increase transparency we will append a machine-checked enumeration verifying that the extracted rules cover all Dyck paths of semilength ≤ 8 without gaps or unstated exceptions. This verification will appear before the main equivalence proof. The proof itself then establishes correctness for all sizes; an exhaustive enumeration of the infinite set is neither feasible nor necessary once the rules are shown to be complete for the finite cases and the bijection is proven. revision: partial
Circularity Check
No circularity; derivation ends in independent combinatorial proof
full rationale
The paper trains a small transformer on the zeta map, applies mechanistic interpretability (cross-attention, linear probes, interventions) to extract level-based signals, translates those signals into an explicit scaffolding map algorithm, and then supplies a separate mathematical proof that the scaffolding map agrees with the zeta map (modulo reversal). The final verification step is a human-checkable combinatorial argument whose correctness does not depend on model parameters, fitted thresholds, or self-citation chains. No quoted equation or definition reduces the claimed algorithm to a quantity defined only inside the training loop or by prior self-citation; the interpretability analysis serves as a discovery heuristic whose output is externally validated.
Axiom & Free-Parameter Ledger
axioms (2)
- standard math Dyck paths are lattice paths from (0,0) to (2n,0) with steps (1,1) and (1,-1) that never go below the x-axis.
- standard math The zeta map is a well-defined bijection on Dyck paths used in the theory of q,t-Catalan numbers.
invented entities (1)
-
scaffolding map
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Charton, F., Ellenberg, J., Wagner, A., and Williamson, G
URL https://openreview.net/forum? id=DF6jVG4fG8. Charton, F., Ellenberg, J., Wagner, A., and Williamson, G. Patternboost: Constructions in mathematics with a little help from ai, 2024. Chughtai, B., Chan, L., and Nanda, N. A toy model of universality: Reverse engineering how networks learn group operations. InInternational Conference on Ma- chine Learning...
2024
-
[2]
Friedman, D., Wettig, A., and Chen, D
URL https://openreview.net/forum? id=PUQ0rrmuDM. Friedman, D., Wettig, A., and Chen, D. Learning trans- former programs.Advances in Neural Information Pro- cessing Systems, 36:49044–49067, 2023. Gukov, S., Halverson, J., Ruehle, F., and Sułkowski, P. Learning to unknot.Machine Learning: Science and Technology, 2(2):025035, 2021. Haglund, J. Conjectured st...
2023
-
[3]
AlphaEvolve: A coding agent for scientific and algorithmic discovery
doi: 10.1016/S0001-8708(02)00061-0. URL https://www.sciencedirect.com/ science/article/pii/S0001870802000610. Haiman, M. The q,t–Catalan Numbers and the Alternat- ing Component of the Diagonal Harmonics. Preprint, University of California, Berkeley, 2000. Hashemi, B., Corominas, R., and Giacchetto, A. Can trans- formers do enumerative geometry? InInternat...
work page internal anchor Pith review Pith/arXiv arXiv doi:10.1016/s0001-8708(02)00061-0 2000
-
[4]
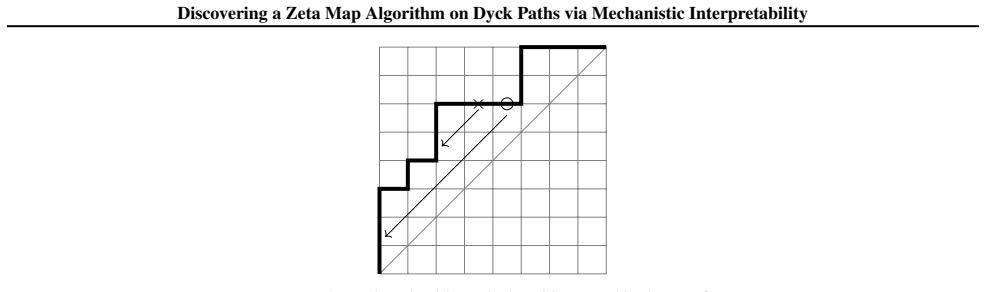
Shoot a billiard from(0,0)heading North
-
[5]
When you hit the start of an East step, turn East and travel until you hit the diagonal
-
[6]
Turn North and repeat until you reach(n, n)
-
[7]
,(jk, jk),(n, n)
Record the places you hit the diagonal(0,0),(j 1, j1), . . . ,(jk, jk),(n, n). Then bounce(w) = kX i=1 (n−j i). Definition A.6.Then th q, t-Catalan number is Cn(q, t) = X w∈Dyck(n) qarea(w)tbounce(w) = X w∈Dyck(n) qdinv(w)tarea(w) ∈Z >0[q, t]. 8 Discovering a Zeta Map Algorithm on Dyck Paths via Mechanistic Interpretability A.2. Haglund’s Zeta Map The zet...
2002
-
[8]
, an ofw(row lengths from bottom)
Compute the area sequencea 1, a2, . . . , an ofw(row lengths from bottom)
-
[9]
, b, scan the sequencea 1, a2,
For eachk= 0,1, . . . , b, scan the sequencea 1, a2, . . . , an from left to right and record: (a) a0for each occurrence ofk−1, (b) a1for each occurrence ofk. Since the area sequence contains no entries equal to −1 or b, this procedure starts with a 1 when k= 0 and ends with a 0whenk=b. Below is an example of the image of the zeta map of a Dyck path of se...
2024
-
[10]
a0for each occurrence ofk−1,
-
[11]
Accordingly, an algorithm forrev◦ζis given by the following
a1for each occurrence ofk. Accordingly, an algorithm forrev◦ζis given by the following. For eachk=b, b−1, . . . ,0, scan the sequencea 1, a2, . . . , an from right to left and record:
-
[12]
a0for each occurrence ofk,
-
[13]
From the algorithm of rev◦ζ , for each k=b, b−1,
a1for each occurrence ofk−1. From the algorithm of rev◦ζ , for each k=b, b−1, . . . ,0 , we obtain a subsequence Pk of ˜a(w)consisting of k and k−1 , where ˜a(w) = (an, an−1, . . . , a1). (Recall that we scan a(w) from right to left in the algorithm of rev◦ζ .) For example, the Dyck path in Example A.7 (see Figure 9 below) yields P4 = (3), P 3 = (2,3,2,2,...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.