Enhancing the MADDPG Algorithm for Multi-Agent Learning via Action Inference and Importance Sampling
Pith reviewed 2026-06-28 06:56 UTC · model grok-4.3
The pith
Adding an action inference module and geometric importance sampling to MADDPG improves stability, cooperation, and exploration efficiency.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
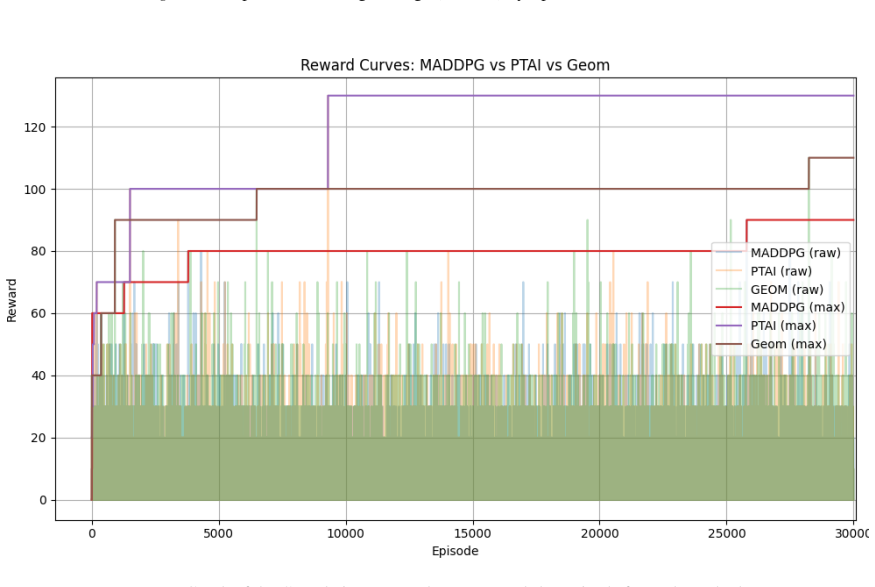
The authors claim that the Action Inference mechanism enables each agent to predict other agents' intended actions from local observations, thereby improving the accuracy and stability of its own policy, while importance sampling with a geometric distribution in the replay buffer prioritizes more recent and informative experiences to mitigate non-stationarity, producing better results than standard MADDPG on the discrete-action Predator-Prey task from PettingZoo.
What carries the argument
Action Inference module that predicts other agents' intended actions from local observations, paired with geometric-distribution importance sampling in the replay buffer.
If this is right
- Agents exhibit increased inter-agent cooperation because each can anticipate the others' moves.
- Learning stability rises as the effects of non-stationarity are reduced by both mechanisms.
- Exploration efficiency improves measurably compared with uniform replay sampling in MADDPG.
- The combined changes produce higher performance on discrete-action multi-agent tasks such as Predator-Prey.
Where Pith is reading between the lines
- The same inference-plus-sampling pattern could be tested on continuous-action or partially observable environments to check whether the accuracy assumption holds beyond the discrete Predator-Prey case.
- Dynamically adjusting the geometric parameter during training, based on measured policy change rates, might further reduce sensitivity to the fixed-parameter choice.
- If action inference remains reliable, other multi-agent algorithms that currently rely on centralized critics might achieve similar gains through decentralized prediction alone.
Load-bearing premise
The action inference module can produce sufficiently accurate predictions of other agents' actions from local observations alone, and the chosen geometric distribution parameter matches the non-stationarity present in the Predator-Prey environment.
What would settle it
Ablating the action inference module on the same Predator-Prey evaluations and finding that stability and cooperation gains disappear would falsify the claim that inference drives the reported improvements.
Figures
read the original abstract
We investigate multi-agent deep reinforcement learning and propose two enhancements to the Multi-Agent Deep Deterministic Policy Gradient (MADDPG) algorithm. First, we introduce a novel Action Inference mechanism that enables each agent to predict other agents' intended actions, thereby improving the accuracy and stability of its own policy. Second, we apply an importance sampling strategy, using geometric distribution, in the replay buffer to prioritize more recent and informative experiences, which helps mitigate the non-stationarity inherent in multi-agent environments. We evaluate both modifications on the discrete-action Predator-Prey task provided by the PettingZoo library, a flexible Python interface for general multi-agent reinforcement learning benchmarks. Our results indicate that Action Inference is effective in improving learning stability and inter-agent cooperation and that importance sampling using geometric distribution can lead to significant improvements in exploration efficiency over standard MADDPG. Code available at https://github.com/shaashwathsivakumar/MARL_Proj
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes two enhancements to MADDPG for multi-agent RL: (1) an Action Inference module enabling each agent to predict other agents' actions from local observations to improve policy stability and cooperation, and (2) geometric-distribution importance sampling in the replay buffer to prioritize recent experiences and mitigate non-stationarity. Both are evaluated on the discrete-action Predator-Prey task from PettingZoo, with claims of improved learning stability, inter-agent cooperation, and exploration efficiency over baseline MADDPG; code is released.
Significance. If the central claims hold after verification, the work offers practical, implementable modifications to a widely used MARL algorithm that directly target partial observability and non-stationarity. The public code release is a clear strength for reproducibility.
major comments (2)
- [Evaluation / Results] The central claim that Action Inference improves policy accuracy and stability requires that the inference head produces sufficiently accurate predictions of other agents' actions from local observations alone. No quantitative metric (prediction accuracy, MSE, or correlation with ground-truth actions) is reported for this module in the evaluation; end-task performance deltas alone do not isolate its contribution from the importance-sampling component or extra parameters.
- [Methods / Evaluation] The geometric importance-sampling modification is presented as addressing non-stationarity, yet no ablation or sensitivity analysis is shown for the distribution parameter, nor are separate learning curves provided that isolate its effect from Action Inference.
minor comments (2)
- [Abstract / Evaluation] The abstract and methods should explicitly state the number of random seeds, whether statistical significance tests were performed, and the precise baseline MADDPG implementation details (including any hyper-parameter matching).
- [Figures / Tables] Figure captions and tables should include error bars or confidence intervals to allow assessment of result robustness.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address the major comments point-by-point below and will incorporate revisions to improve the evaluation section.
read point-by-point responses
-
Referee: [Evaluation / Results] The central claim that Action Inference improves policy accuracy and stability requires that the inference head produces sufficiently accurate predictions of other agents' actions from local observations alone. No quantitative metric (prediction accuracy, MSE, or correlation with ground-truth actions) is reported for this module in the evaluation; end-task performance deltas alone do not isolate its contribution from the importance-sampling component or extra parameters.
Authors: We agree that the current evaluation does not isolate the Action Inference module's contribution through direct metrics on its predictions. End-task performance alone is insufficient to fully substantiate the mechanism's role. In the revised manuscript, we will add quantitative metrics including prediction accuracy, MSE, and correlation between inferred and ground-truth actions of other agents, computed on held-out experiences during training. revision: yes
-
Referee: [Methods / Evaluation] The geometric importance-sampling modification is presented as addressing non-stationarity, yet no ablation or sensitivity analysis is shown for the distribution parameter, nor are separate learning curves provided that isolate its effect from Action Inference.
Authors: The comment is correct; the manuscript lacks ablations and sensitivity analysis for the geometric parameter as well as isolated curves. We will revise to include sensitivity analysis varying the geometric distribution parameter and separate learning curves showing the isolated effect of importance sampling (with Action Inference disabled) versus the combined approach. revision: yes
Circularity Check
No circularity: empirical enhancements evaluated on external benchmark
full rationale
The paper introduces two algorithmic modifications to MADDPG (action inference module and geometric importance sampling in replay buffer) and reports performance on the external PettingZoo Predator-Prey task against unmodified MADDPG. No equations, derivations, or self-citations are present that reduce any claimed result to a fitted quantity or prior result defined inside the paper. The evaluation uses direct deltas on an independent benchmark, satisfying the self-contained criterion.
Axiom & Free-Parameter Ledger
free parameters (1)
- geometric distribution parameter
axioms (2)
- domain assumption Other agents' actions can be inferred from local observations with useful accuracy
- domain assumption Geometric weighting mitigates non-stationarity better than uniform sampling
Reference graph
Works this paper leans on
-
[1]
Sutton and Andrew G
Richard S. Sutton and Andrew G. Barto , title =. 2018 , publisher =
2018
-
[2]
arXiv preprint arXiv:2101.00000 , year =
Vitaly Kurin and others , title =. arXiv preprint arXiv:2101.00000 , year =
-
[3]
2013 , eprint=
Playing Atari with Deep Reinforcement Learning , author=. 2013 , eprint=
2013
-
[4]
2020 , eprint=
Multi-Agent Actor-Critic for Mixed Cooperative-Competitive Environments , author=. 2020 , eprint=
2020
-
[5]
2024 , eprint=
MAPPO-PIS: A Multi-Agent Proximal Policy Optimization Method with Prior Intent Sharing for CAVs' Cooperative Decision-Making , author=. 2024 , eprint=
2024
-
[6]
arXiv preprint arXiv:2009.14471 , year=
PettingZoo: Gym for Multi-Agent Reinforcement Learning , author=. arXiv preprint arXiv:2009.14471 , year=
arXiv 2009
-
[7]
multiagent-particle-envs , year =
-
[8]
PettingZoo: A Library of Multi-Agent Reinforcement Learning Environments , year =
-
[9]
maddpg-pettingzoo-pytorch , year =
-
[10]
Cooperative Agents , author =
Multi-Agent Reinforcement Learning: Independent vs. Cooperative Agents , author =. Proceedings of the Tenth International Conference on Machine Learning (ICML) , year =
-
[11]
arXiv preprint arXiv:1609.07845 , year =
Decentralized Non-communicating Multiagent Collision Avoidance with Deep Reinforcement Learning , author =. arXiv preprint arXiv:1609.07845 , year =
-
[12]
arXiv preprint arXiv:2103.01955 , year =
The Surprising Effectiveness of PPO in Cooperative, Multi-Agent Games , author =. arXiv preprint arXiv:2103.01955 , year =
-
[13]
Surveillance & Society , volume =
A Flock of Rogue Drones , author =. Surveillance & Society , volume =
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.