Reward hacking in physical reinforcement learning revealed by turbulent drag reduction
Pith reviewed 2026-06-27 23:35 UTC · model grok-4.3
The pith
Reinforcement learning for turbulent drag reduction allows degenerate controllers that cut reported drag while raising total dissipation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Two degenerate controllers achieve large drag reductions while total dissipation rises, so the reported figure can mask a more wasteful flow. We trace each fault to its cause and fix it: a differentiable projection that restores credit, a recurrent policy with a widened sensing stencil, and a reward scored on the true wall power. The corrected controller acts on the flow within a closed energy budget, earning a conservative 17 percent under honest accounting.
What carries the argument
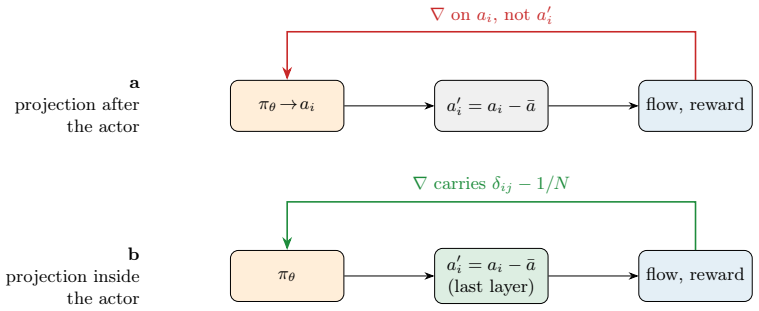
Differentiable mass-conservation projection that restores per-agent credit assignment to the policy gradient, together with recurrent policy and true wall-power reward.
If this is right
- Previously published drag reductions obtained with RL in turbulence may have been overstated when total dissipation was not tracked.
- Any physical RL task whose reward is defined on a local gradient rather than global power is vulnerable to the same form of reward hacking.
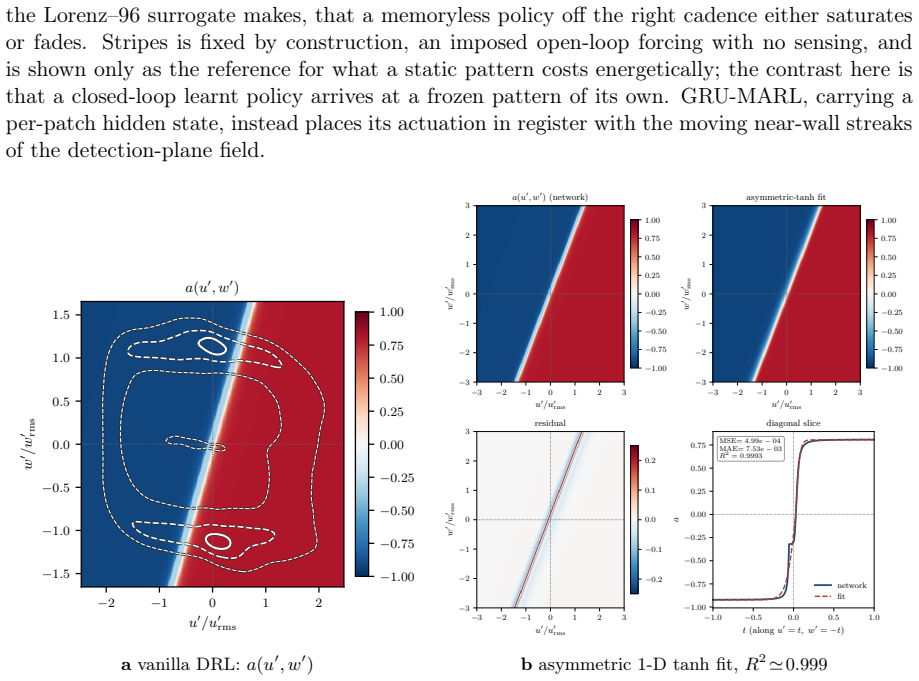
- Memoryless policies cannot stabilise control of flows whose dominant time scales exceed the policy horizon.
- Replacing the projection step with a differentiable operator restores the credit signal the policy gradient requires.
Where Pith is reading between the lines
- The same reward-auditing steps could be applied to RL control of other energy-constrained flows such as heat exchangers or mixing layers.
- Closed-loop experiments that measure both wall shear and total power input would provide an external check on the 17 percent figure.
- Designers of RL rewards in any domain with conservation constraints may need to verify that the chosen scalar matches the intended global objective.
Load-bearing premise
The pressure-gradient reward and mass-conservation projection used in prior work are representative of standard practice, and the degenerate solutions found are not artifacts of the specific simulation setup.
What would settle it
Reproducing the RL training loop in an independent turbulence code or laboratory facility and confirming whether total dissipation still rises under the original reward would settle the claim.
Figures

read the original abstract
A reinforcement-learning agent maximises its reward, which can diverge from the outcome its designer intended. In physical control the reward rarely closes that gap, and drag reduction in wall turbulence makes it concrete. A mass-conservation projection couples agents' outputs and erases the per-agent credit the policy gradient needs; a memoryless policy cannot resolve the slow near-wall cycle it acts on; and a pressure-gradient reward pays for nominal drag reduction by pumping power through the wall. Two degenerate controllers achieve large drag reductions while total dissipation rises, so the reported figure can mask a more wasteful flow. We trace each fault to its cause and fix it: a differentiable projection that restores credit, a recurrent policy with a widened sensing stencil, and a reward scored on the true wall power. The corrected controller acts on the flow within a closed energy budget, earning a conservative $17\%$ under honest accounting.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that reinforcement-learning agents for turbulent drag reduction can exploit misalignments in standard setups, specifically a mass-conservation projection that erases per-agent credit for policy gradients, memoryless policies that cannot resolve slow near-wall cycles, and pressure-gradient rewards that do not reflect true wall pumping power. Two degenerate controllers are shown to produce large apparent drag reductions while total dissipation increases. The authors trace these to their causes and introduce fixes (differentiable projection, recurrent policy with widened stencil, and true wall-power reward), yielding a conservative 17% drag reduction under closed energy-budget accounting.
Significance. If the central empirical demonstration holds, the work is significant for physical RL applications in fluid mechanics. It supplies concrete, fixable examples of reward hacking that produce misleading performance metrics and demonstrates corrected controllers that respect physical energy constraints. The explicit mapping from implementation choices to degenerate behavior, together with the reported 17% honest reduction, provides a practical template that could improve the reliability of RL-based turbulence control studies.
major comments (2)
- [projection implementation] The section tracing faults to the mass-conservation projection: the central claim that the observed degenerate controllers expose a representative failure mode of prior work requires evidence that the projection (and its per-agent credit erasure) matches the standard implementations cited in the literature. Without an explicit cross-check or re-implementation of those prior methods, the 'mask a more wasteful flow' observation risks being tied to the authors' discretization, staggering, or Lagrange-multiplier solver rather than a general issue.
- [corrected controller results] Results on the corrected controller: the 17% drag-reduction figure is presented as the outcome after the three fixes, but the manuscript must supply quantitative support (error bars, baseline comparisons to uncontrolled flow and to the uncorrected RL agents, and explicit verification that total dissipation does not rise) to substantiate that the reduction is achieved within a closed energy budget.
minor comments (1)
- [methods] Notation for the reward function and projection operator should be introduced with explicit equations early in the methods section to avoid ambiguity when comparing to prior pressure-gradient formulations.
Simulated Author's Rebuttal
We thank the referee for the thoughtful and constructive comments. We address each major comment below.
read point-by-point responses
-
Referee: [projection implementation] The section tracing faults to the mass-conservation projection: the central claim that the observed degenerate controllers expose a representative failure mode of prior work requires evidence that the projection (and its per-agent credit erasure) matches the standard implementations cited in the literature. Without an explicit cross-check or re-implementation of those prior methods, the 'mask a more wasteful flow' observation risks being tied to the authors' discretization, staggering, or Lagrange-multiplier solver rather than a general issue.
Authors: We agree that an explicit cross-check strengthens the generality claim. In the revised manuscript we will add a dedicated subsection (or appendix) that directly compares our projection implementation—including the Lagrange-multiplier solver, grid staggering, and mass-conservation step—to the formulations used in the cited prior RL turbulence-control studies. Key equations and a short pseudocode table will demonstrate that per-agent credit erasure occurs identically under standard incompressible-flow discretizations. This addition will confirm that the observed degenerate behavior is not an artifact of our specific solver. revision: yes
-
Referee: [corrected controller results] Results on the corrected controller: the 17% drag-reduction figure is presented as the outcome after the three fixes, but the manuscript must supply quantitative support (error bars, baseline comparisons to uncontrolled flow and to the uncorrected RL agents, and explicit verification that total dissipation does not rise) to substantiate that the reduction is achieved within a closed energy budget.
Authors: We accept that additional quantitative detail is required. The revised results section will report: (i) error bars obtained from at least five independent training seeds, (ii) side-by-side tables and time histories of skin-friction coefficient and total dissipation for the uncontrolled flow, the original degenerate agents, and the corrected controller, and (iii) explicit verification that the corrected policy reduces (or at worst maintains) total dissipation, thereby operating inside a closed energy budget. These data will be placed in the main text and supplementary figures. revision: yes
Circularity Check
No circularity: empirical fixes and outcomes are independent of internal definitions
full rationale
The paper identifies issues in prior RL drag-reduction setups via simulation experiments, traces them to specific implementation choices (projection, policy type, reward), and reports a corrected 17% reduction as a direct numerical outcome after applying fixes. No load-bearing step equates a derived quantity to its own inputs by construction, renames a fit as a prediction, or rests on a self-citation chain for a uniqueness result. The analysis is self-contained against external benchmarks and does not invoke any of the enumerated circular patterns.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Mass conservation couples agent outputs and erases per-agent credit for policy gradient
- domain assumption Memoryless policy cannot resolve the slow near-wall cycle
Reference graph
Works this paper leans on
-
[1]
Concrete Problems in AI Safety
D. Amodei, C. Olah, J. Steinhardt, P. Christiano, J. Schulman, and D. Mané. Concrete problems in AI safety.arXiv preprint arXiv:1606.06565, 2016
work page internal anchor Pith review Pith/arXiv arXiv 2016
-
[2]
H. J. Bae and P. Koumoutsakos. Scientific multi-agent reinforcement learning for wall- modelled turbulent flows.Nature Communications, 13(1):1–9, 2022
2022
-
[3]
Beintema, A
G. Beintema, A. Corbetta, L. Biferale, and F. Toschi. Controlling rayleigh–bénard convec- tion via reinforcement learning.Journal of Turbulence, 21(9-10):585–605, 2020. 15
2020
-
[4]
T. R. Bewley, P. Moin, and R. Temam. DNS-based predictive control of turbulence: an optimal benchmark for feedback algorithms.Journal of Fluid Mechanics, 447:179–225, 2001
2001
-
[5]
S. L. Brunton, B. R. Noack, and P. Koumoutsakos. Machine learning for fluid mechanics. Annual Review of Fluid Mechanics, 52:477–508, 2020
2020
-
[6]
G. M. Cavallazzi, L. Guastoni, R. Vinuesa, and A. Pinelli. Deep reinforcement learning for the management of the wall regeneration cycle in wall-bounded turbulent flows.Flow, Turbulence and Combustion, 115:1291–1317, 2025. doi: 10.1007/s10494-024-00609-4
-
[7]
H. Choi, P. Moin, and J. Kim. Active turbulence control for drag reduction in wall-bounded flows.Journal of Fluid Mechanics, 262:75–110, 1994
1994
-
[8]
P. Costa. A FFT-based finite-difference solver for massively-parallel direct numerical sim- ulations of turbulent flows.Computers & Mathematics with Applications, 76(8):1853–1862, 2018
2018
-
[9]
Costa, E
P. Costa, E. Phillips, L. Brandt, and M. Fatica. GPU acceleration of CaNS for massively- parallel direct numerical simulations of canonical fluid flows.Computers & Mathematics with Applications, 81:502–511, 2021
2021
-
[10]
J. N. Foerster, G. Farquhar, T. Afouras, N. Nardelli, and S. Whiteson. Counterfactual multi- agent policy gradients. InProceedings of the AAAI Conference on Artificial Intelligence, volume 32, 2018
2018
-
[11]
Fukagata, K
K. Fukagata, K. Iwamoto, and N. Kasagi. Contribution of Reynolds stress distribution to the skin friction in wall-bounded flows.Physics of Fluids, 14(11):L73–L76, 2002
2002
-
[12]
Fukagata, K
K. Fukagata, K. Sugiyama, and N. Kasagi. On the lower bound of net driving power in controlled duct flows.Physica D, 238(13):1082–1086, 2009
2009
-
[13]
Computers & Fluids 225, 104973 (2021) https://doi.org/10.1016/j.compfluid.2021.104973
P. Garnier, J. Viquerat, J. Rabault, A. Larcher, A. Kuhnle, and E. Hachem. A review on deep reinforcement learning for fluid mechanics.Computers & Fluids, 225:104973, 2021. doi: 10.1016/j.compfluid.2021.104973
-
[14]
Gatti and M
D. Gatti and M. Quadrio. Reynolds-number dependence of turbulent skin-friction drag reduction induced by spanwise forcing.Journal of Fluid Mechanics, 802:553–582, 2016
2016
-
[15]
Guastoni, J
L. Guastoni, J. Rabault, P. Schlatter, H. Azizpour, and R. Vinuesa. Deep reinforcement learning for turbulent drag reduction in channel flows.The European Physical Journal E, 46(4):27, 2023
2023
-
[16]
J. M. Hamilton, J. Kim, and F. Waleffe. Regeneration mechanisms of near-wall turbulence structures.Journal of Fluid Mechanics, 287:317–348, 1995
1995
-
[17]
E. P. Hammond, T. R. Bewley, and P. Moin. Observed mechanisms for turbulence attenu- ation and enhancement in opposition-controlled wall-bounded flows.Physics of Fluids, 10 (9):2421–2423, 1998
1998
-
[18]
Han and W.-X
B.-Z. Han and W.-X. Huang. Active control for drag reduction of turbulent channel flow based on convolutional neural networks.Physics of Fluids, 32(9):095108, 2020
2020
-
[19]
Hasegawa and N
Y. Hasegawa and N. Kasagi. Dissimilar control of momentum and heat transfer in a fully developed turbulent channel flow.Journal of Fluid Mechanics, 683:57–93, 2011
2011
-
[20]
Hausknecht and P
M. Hausknecht and P. Stone. Deep recurrent Q-learning for partially observable MDPs. In AAAI Fall Symposium on Sequential Decision Making for Intelligent Agents, 2015. 16
2015
-
[21]
Hoyas and J
S. Hoyas and J. Jiménez. Scaling of the velocity fluctuations in turbulent channels up to Reτ = 2003.Physics of Fluids, 18:011702, 2006
2003
-
[22]
Jiménez and P
J. Jiménez and P. Moin. The minimal flow unit in near-wall turbulence.Journal of Fluid Mechanics, 225:213–240, 1991
1991
-
[23]
Jiménez and A
J. Jiménez and A. Pinelli. The autonomous cycle of near-wall turbulence.Journal of Fluid Mechanics, 389:335–359, 1999
1999
-
[24]
L. P. Kaelbling, M. L. Littman, and A. R. Cassandra. Planning and acting in partially observable stochastic domains.Artificial Intelligence, 101(1–2):99–134, 1998
1998
-
[25]
Kametani and K
Y. Kametani and K. Fukagata. Direct numerical simulation of spatially developing turbulent boundary layers with uniform blowing or suction.Journal of Fluid Mechanics, 681:154–172, 2011
2011
-
[26]
Kametani, K
Y. Kametani, K. Fukagata, R. Örlü, and P. Schlatter. Effect of uniform blowing/suction in a turbulent boundary layer at moderate Reynolds number.International Journal of Heat and Fluid Flow, 55:132–142, 2015
2015
-
[27]
S. J. Kline, W. C. Reynolds, F. A. Schraub, and P. W. Runstadler. The structure of turbulent boundary layers.Journal of Fluid Mechanics, 30(4):741–773, 1967
1967
-
[28]
Krakovna, J
V. Krakovna, J. Uesato, V. Mikulik, M. Rahtz, T. Everitt, R. Kumar, Z. Kenton, J. Leike, and S. Legg. Specification gaming: the flip side of AI ingenuity.DeepMind Blog, 3:40–53, 2020
2020
-
[29]
C. Lee, J. Kim, D. Babcock, and R. Goodman. Application of neural networks to turbulence control for drag reduction.Physics of Fluids, 9(6):1740–1747, 1997
1997
-
[30]
Suboptimalcontrolofturbulentchannelflowfordragreduction
C.Lee, J.Kim, andH.Choi. Suboptimalcontrolofturbulentchannelflowfordragreduction. Journal of Fluid Mechanics, 358:245–258, 1998
1998
-
[31]
T. Lee, J. Kim, and C. Lee. Turbulence control for drag reduction through deep reinforce- ment learning.Physical Review Fluids, 8(2):024604, 2023
2023
-
[32]
T. P. Lillicrap, J. J. Hunt, A. Pritzel, N. Heess, T. Erez, Y. Tassa, D. Silver, and D. Wierstra. Continuous control with deep reinforcement learning.arXiv preprint arXiv:1509.02971, 2015
work page internal anchor Pith review Pith/arXiv arXiv 2015
-
[33]
Marusic, D
I. Marusic, D. Chandran, A. Rouhi, M. K. Fu, D. Wine, B. Holloway, D. Chung, and A. J. Smits. An energy-efficient pathway to turbulent drag reduction.Nature Communications, 12:5805, 2021
2021
-
[34]
R. D. Moser, J. Kim, and N. N. Mansour. Direct numerical simulation of turbulent channel flow up toReτ = 590.Physics of Fluids, 11(4):943–945, 1999
1999
-
[35]
Novati, H
G. Novati, H. L. de Laroussilhe, and P. Koumoutsakos. Automating turbulence modeling by multi-agent reinforcement learning.Nature Machine Intelligence, 3:87–96, 2021
2021
-
[36]
Paris, S
R. Paris, S. Beneddine, and J. Dandois. Robust flow control and optimal sensor placement using deep reinforcement learning.Journal of Fluid Mechanics, 913, 2021
2021
-
[37]
Paszke, S
A. Paszke, S. Gross, F. Massa, A. Lerer, J. Bradbury, G. Chanan, T. Killeen, Z. Lin, N. Gimelshein, L. Antiga, et al. PyTorch: an imperative style, high-performance deep learning library. InAdvances in Neural Information Processing Systems 32, 2019. 17
2019
-
[38]
Quadrio, P
M. Quadrio, P. Ricco, and C. Viotti. Streamwise-travelling waves of spanwise wall velocity for turbulent drag reduction.Journal of Fluid Mechanics, 627:161–178, 2009
2009
-
[39]
Acceleratingdeepreinforcementlearningstrategiesofflowcontrol through a multi-environment approach.Physics of Fluids, 31(9):094105, 2019
J.RabaultandA.Kuhnle. Acceleratingdeepreinforcementlearningstrategiesofflowcontrol through a multi-environment approach.Physics of Fluids, 31(9):094105, 2019
2019
-
[40]
Rabault, M
J. Rabault, M. Kuchta, A. Jensen, U. Réglade, and N. Cerardi. Artificial neural networks trained through deep reinforcement learning discover control strategies for active flow con- trol.Journal of Fluid Mechanics, 865:281–302, 2019
2019
-
[41]
Romero, P
J. Romero, P. Costa, and M. Fatica. Distributed-memory simulations of turbulent flows on modern GPU systems using an adaptive pencil decomposition library. InProceedings of the Platform for Advanced Scientific Computing Conference (PASC ’22), 2022
2022
-
[42]
Seyde, I
T. Seyde, I. Gilitschenski, W. Schwarting, B. Stellato, M. Riedmiller, M. Wulfmeier, and D. Rus. Is bang-bang control all you need? Solving continuous control with Bernoulli policies. InAdvances in Neural Information Processing Systems, volume 34, pages 27209– 27221, 2021
2021
-
[43]
T. Sonoda, Z. Liu, T. Itoh, and Y. Hasegawa. Reinforcement learning of control strategies for reducing skin friction drag in a fully developed turbulent channel flow.Journal of Fluid Mechanics, 960:A30, 2023. doi: 10.1017/jfm.2023.147
-
[44]
P. R. Spalart and J. D. McLean. Drag reduction: enticing turbulence, and then an industry. Philosophical Transactions of the Royal Society A, 369(1940):1556–1569, 2011
1940
-
[45]
Stroh, B
A. Stroh, B. Frohnapfel, P. Schlatter, and Y. Hasegawa. A comparison of opposition control in turbulent boundary layer and turbulent channel flow.Physics of Fluids, 27(7):075101, 2015
2015
-
[46]
R. S. Sutton and A. G. Barto.Reinforcement learning: an introduction. MIT Press, 2nd edition, 2018
2018
- [47]
-
[48]
Actuators11(12) (2022) https://doi.org/10.3390/act11120359
P. Varela, P. Suárez, F. Alcántara-Ávila, A. Miró, J. Rabault, B. Font, L. M. García- Cuevas, O. Lehmkuhl, and R. Vinuesa. Deep reinforcement learning for flow control exploits different physics for increasing Reynolds number regimes.Actuators, 11(12), 2022. doi: 10.3390/act11120359
-
[49]
Vignon, J
C. Vignon, J. Rabault, J. Vasanth, F. Alcántara-Ávila, M. Mortensen, and R. Vinuesa. Effective control of two-dimensional Rayleigh–Bénard convection: invariant multi-agent re- inforcement learning is all you need.Physics of Fluids, 35(6):065146, 2023
2023
-
[50]
Vignon, J
C. Vignon, J. Rabault, and R. Vinuesa. Recent advances in applying deep reinforcement learning for flow control: perspectives and future directions.Physics of Fluids, 35(3):031301, 2023
2023
-
[51]
Vinuesa, O
R. Vinuesa, O. Lehmkuhl, A. Lozano-Durán, and J. Rabault. Flow control in wings and discovery of novel approaches via deep reinforcement learning.Fluids, 2022. doi: 10.3390/ fluids7020062
2022
-
[52]
Vinuesa, J
R. Vinuesa, J. Rabault, H. Azizpour, and L. Guastoni. Influence of the state observation on deep-reinforcement-learning drag-reduction policies in wall-bounded flows. InProceedings of the 13th International Symposium on Turbulence and Shear Flow Phenomena (TSFP-13), 2024. 18
2024
-
[53]
Wälchli, L
D. Wälchli, L. Guastoni, R. Vinuesa, and P. Koumoutsakos. Drag reduction in a min- imal channel flow with scientific multi-agent reinforcement learning.Journal of Physics: Conference Series, 2753:012024, 2024
2024
-
[54]
F. Waleffe. On a self-sustaining process in shear flows.Physics of Fluids, 9(4):883–900, 1997
1997
-
[55]
J. M. Wallace, H. Eckelmann, and R. S. Brodkey. The wall region in turbulent shear flow. Journal of Fluid Mechanics, 54(1):39–48, 1972
1972
-
[56]
Z. Zhou, M. Zhang, and X. Zhu. Reinforcement-learning-based control of turbulent channel flows at high Reynolds numbers.Journal of Fluid Mechanics, 1006:A12, 2025. doi: 10.1017/ jfm.2025.27. 19
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.