Diverse efficiency of observable optimization for four-level quantum systems with higher-order traps
Pith reviewed 2026-07-02 11:25 UTC · model grok-4.3
The pith
The null control is a fifth-order trap for observable optimization in specific four-level quantum systems.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
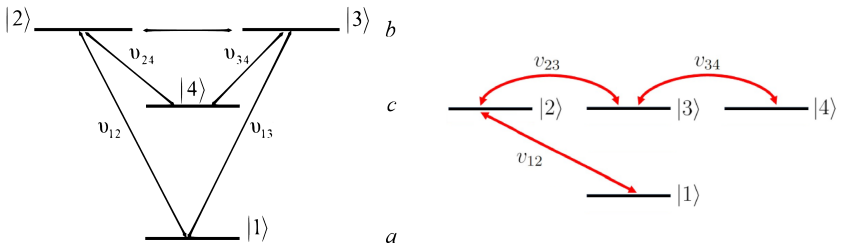
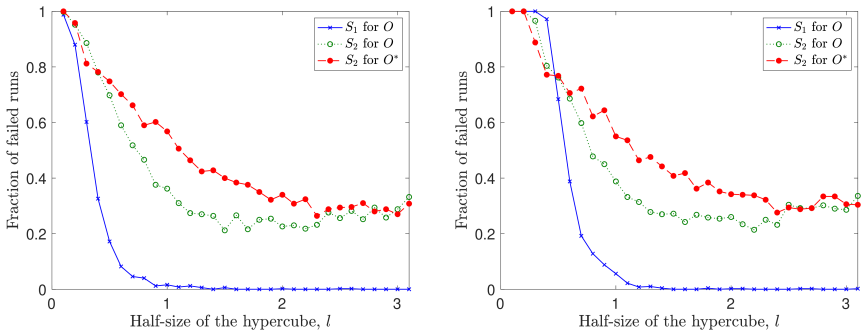
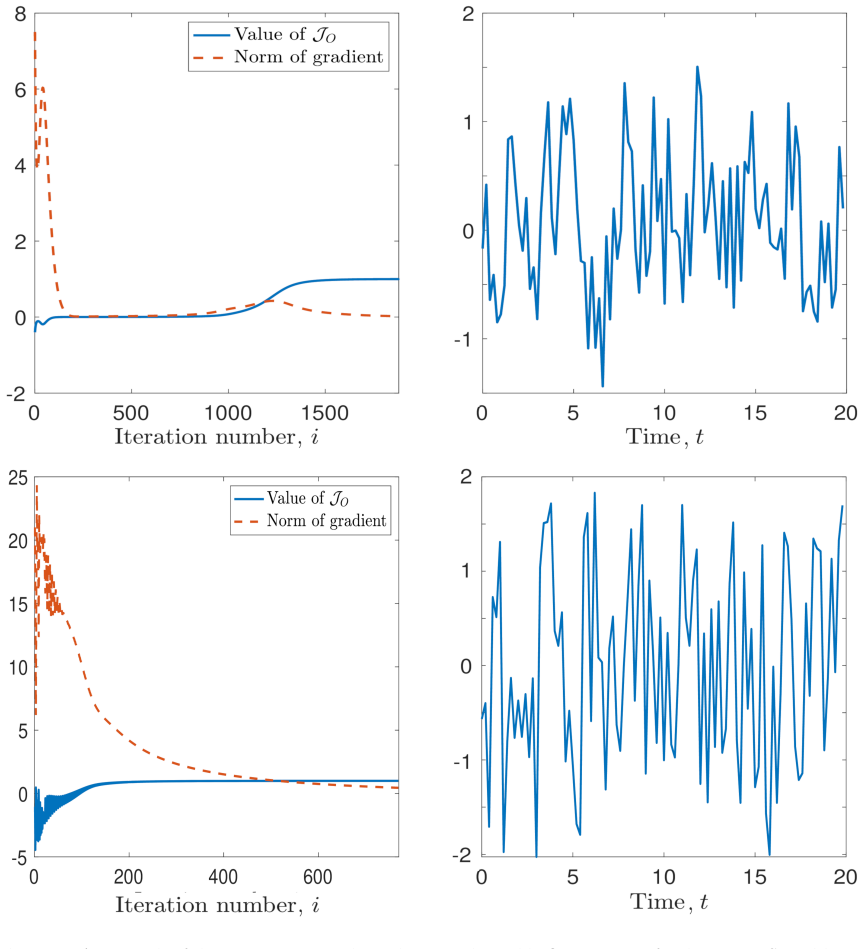
The null control is a five-order trap for a V-V system and an anharmonic system; numerical optimization of an observable shows a sharp efficiency increase up to 100 percent at certain distances from the null control for the V-V case, contrasted with slower and less significant increase (and occasional small decrease) for the chain-interaction Hamiltonian, possibly due to the fine structure of the subspace where the second derivative is zero.
What carries the argument
The fifth-order trap at the null control, analyzed through higher-order derivatives of the objective functional in the quantum control landscape.
If this is right
- For the V-V Hamiltonian, optimization efficiency rises sharply to 100 percent once the control moves a modest distance from the null point.
- For the chain-interaction Hamiltonian, the efficiency increase remains slower and can even turn negative over the same distances.
- The contrasting behaviors trace to the fine structure of the subspace of controls where the second derivative of the objective is zero.
- Unconstrained (GRAPE) and constrained (GPM) methods both exhibit the same system-dependent pattern.
Where Pith is reading between the lines
- Higher trap order may set how far an optimizer must travel before efficiency recovers in multi-level quantum systems.
- The observed contrast suggests that Hamiltonian interaction topology can dominate the practical performance of gradient-based control algorithms.
- Extending the same higher-order trap analysis to other four-level or five-level systems could reveal whether the sharp-versus-slow distinction is generic.
Load-bearing premise
The systems studied have the specific V-V or anharmonic/chain interaction structures that allow the null control to be treated as a higher-order trap.
What would settle it
A direct calculation showing that the fourth-order term in the expansion of the objective around the null control is nonzero for one of the listed Hamiltonians, or a numerical run in which efficiency does not exhibit the reported sharp versus slow contrast.
Figures
read the original abstract
In this work, we perform an analytical and numerical analysis of quantum landscapes for controlling special four-level quantum systems for which we prove that the null control is a five-order trap: a $V-V$ system and an anharmonic system. As a control goal, an observable optimization is considered. The rigorous theoretical analysis is followed by the numerical experiments based on the GRadient Ascent Pulse Engineering (GRAPE) algorithm and Gradient Projection Method (GPM), performed to investigate the behavior of the efficiency of optimization for unconstrained (using GRAPE) and constrained (using GPM) controls. As the main result, we observe an interesting phenomenon with a diverse behavior of the optimization efficiency depending on the system Hamiltonian -- sharp increase of the optimization efficiency up to 100% at certain distance from the null control for a V-V system, while much slower and less significant increase (and even small decrease) for a system with the chain interaction. This sharp difference might be related with the fine structure of the subspace of controls where second derivative of the objective functional is zero.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proves that the null control is a fifth-order trap for observable optimization in two explicitly constructed special four-level quantum systems (a V-V system and an anharmonic/chain system). This analytical result is followed by numerical experiments using the GRAPE algorithm (unconstrained) and GPM (constrained) that document a sharp difference in optimization efficiency: rapid rise to 100% efficiency at finite distance from the null control for the V-V Hamiltonian versus slower and weaker improvement (sometimes a small decrease) for the chain Hamiltonian. The authors attribute the difference to the fine structure of the subspace where the second derivative of the objective vanishes.
Significance. The explicit construction of four-level systems for which a higher-order trap can be rigorously identified supplies a concrete, falsifiable example that advances the theory of quantum control landscapes. The combination of an analytical trap-order proof with reproducible numerical protocols (GRAPE/GPM) is a strength; if the derivation holds, the observed Hamiltonian-dependent efficiency divergence offers a testable prediction for how trap order influences practical optimization performance.
minor comments (3)
- [Abstract] Abstract: 'five-order trap' is nonstandard; replace with 'fifth-order trap'.
- [Abstract] Abstract: 'GRadient Ascent Pulse Engineering' contains an inconsistent capital 'R'; standardize to 'Gradient Ascent Pulse Engineering (GRAPE)'.
- [§2 or §3] The manuscript states that the systems are 'chosen precisely so that the higher-order trap analysis can be carried out'; a brief sentence in §2 or §3 clarifying the design criteria used to select the V-V and anharmonic Hamiltonians would improve readability.
Simulated Author's Rebuttal
We thank the referee for the positive and accurate summary of our work, including the analytical proof that the null control is a fifth-order trap for the specified four-level systems and the numerical comparison of GRAPE and GPM efficiencies. The report correctly identifies the key observation of Hamiltonian-dependent optimization behavior. No specific major comments requiring point-by-point rebuttal were listed in the report.
Circularity Check
No significant circularity detected
full rationale
The paper's central claim is an analytical proof that the null control is a fifth-order trap for two explicitly defined special four-level systems (V-V and anharmonic/chain). This is followed by numerical GRAPE/GPM experiments presented only as supporting observations. No load-bearing steps reduce to self-definition, fitted inputs renamed as predictions, or self-citation chains; the derivation is self-contained against the stated Hamiltonians.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The quantum systems are special four-level systems with V-V or anharmonic interaction Hamiltonians for which the null control forms a fifth-order trap.
Reference graph
Works this paper leans on
-
[1]
C. Koch, U. Boscain, T. Calarco, G. Dirr, S. Filipp, S. Glaser, R. Kosloff, S. Montangero, T. Schulte-Herbr¨ ueggen, D. Sugny and F. Wilhelm. Quantum optimal control in quantum tech- nologies. Strategic report on current status, visions and goals for research in Europe. EPJ Quantum Technol., 9: 19, 2022. doi: 10.1140/epjqt/s40507-022-00138-x
-
[2]
D.J. Tannor. Introduction to quantum mechanics: A time-dependent perspective. University Science Books, Sausilito, 2007
2007
-
[3]
C. Brif, R. Chakrabarti, and H. Rabitz. Control of quantum phenomena: Past, present and future. New J. Phys., 12: 075008, 2010. doi: 10.1088/1367-2630/12/7/075008
-
[4]
J. E. Gough. Principles and applications of quantum control engineering. Phil. Trans. R. Soc. A, 370: 5241–5258, 2012. doi: 10.1098/rsta.2012.0370
-
[6]
T. Schulte-Herbr¨ uggen, S.J. Glaser, G. Dirr and U. Helmke. Gradient flows for optimization in quantum information and quantum dynamics: foundations and applications. Rev. Math. Phys., 22: 597–667, 2010. doi: 10.1142/S0129055X10004053
-
[7]
D.J. Tannor, V. Kazakov and V. Orlov. Control of photochemical branching: novel procedures for finding optimal pulses and global upper bounds. NATO ASI Ser., 299: 347–360, 1992. doi: 10.1007/978-1-4899-2326-4 24
-
[9]
T. Caneva, T. Calarco and S. Montangero. Chopped random-basis quantum optimization. Phys. Rev. A, 84: 022326, 2011. doi: 10.1103/PhysRevA.84.022326
-
[11]
M. Dalgaard, F. Motzoi, J.H.M. Jensen and J. Sherson. Hessian-based optimization of con- strained quantum control. Phys. Rev. A, 102: 042612, 2020. doi: 10.1103/PhysRevA.102.042612
-
[12]
M. Wollenhaupt, A. Pr¨ akelt, C. Sarpe-Tudoran, D. Liese and T. Baumert. Quantum control and quantum control landscapes using intense shaped femtosecond pulses. J. Mod. Opt., 52: 2187–2195, 2005. doi: 10.1080/09500340500275884
-
[13]
P. Marquetand, P. Nuernberger, G. Vogt, T. Brixner and V. Engel. Properties of wave pack- ets deduced from quantum control fitness landscapes. Europhys. Lett., 80: 53001, 2007. doi: 10.1209/0295-5075/80/53001
-
[14]
S. Ruetzel, C. Stolzenberger, S. Fechner, F. Dimler, T. Brixner, D.J. Tannor. Molecular quan- tum control landscapes in von Neumann time-frequency phase space. J. Chem. Phys., 133: 164510, 2010. doi: 10.1063/1.3495950
-
[15]
J.P. Palao, D.M. Reich and C.P. Koch. Steering the optimization pathway in the control land- scape using constraints. Phys. Rev. A, 88: 053409, 2013. doi: 10.1103/PhysRevA.88.053409
-
[16]
E. Zahedinejad, S. Schirmer and B.C. Sanders. Evolutionary algorithms for hard quantum con- trol. Phys. Rev. A, 90: 032310, 2014. doi: 10.1103/PhysRevA.90.032310. 10
-
[17]
Q. Sun, I. Pelczer, G. Riviello, R.-B. Wu, and H. Rabitz. Experimental observation of saddle points over the quantum control landscape of a two-spin system. Phys. Rev. A, 91: 043412,
-
[18]
doi: 10.1103/PhysRevA.91.043412
-
[19]
X. Li. Optimal control of quantum state preparation and entanglement creation in two-qubit quantum system with bounded amplitude. Sci. Rep., 13: 14734, 2023. doi: 10.1038/s41598-023- 41688-z
-
[20]
N. Rach, M. M. M¨ uller, T. Calarco, and S. Montangero. Dressing the chopped-random-basis optimization: A bandwidth-limited access to the trap-free landscape. Phys. Rev. A, 92:062343,
-
[21]
doi: 10.1103/PhysRevA.92.062343
-
[23]
H.A. Rabitz, M.M. Hsieh, and C.M. Rosenthal. Quantum optimally controlled transition land- scapes. Sci., 303: 1998–2001, 2004. doi: 10.1126/science.1093649
-
[24]
A.N. Pechen and N.B. Il’in. Coherent control of a qubit is trap-free. Proc. Steklov Inst. Math., 285: 233–240, 2014. doi: 10.1134/S0081543814040166
-
[25]
A. N. Pechen and D. J. Tannor. Are there traps in quantum control landscapes? Phys. Rev. Lett., 106: 120402, 2011. doi: 10.1103/PhysRevLett.106.120402
-
[26]
A. Pechen and D. Tannor. Pechen and Tannor Reply. Phys. Rev. Lett., 108: 198902, 2012. doi: 10.1103/PhysRevLett.108.198902
-
[27]
P. de Fouquieres and S.G. Schirmer. A closer look at quantum control landscapes and their implication for control optimization. Infin. Dimens. Anal. Quantum Probab. Relat. Top., 16: 1350021, 2013. doi: 10.1142/S0219025713500215
-
[28]
B.O. Volkov and A.N. Pechen. Higher-order traps for some strongly degenerate quantum control systems. Russ. Math. Surv., 78: 390–392, 2023. doi: 10.4213/rm10069e
-
[29]
A. Pechen, H. Rabitz. Unified analysis of terminal-time control in classical and quantum systems. Europhys. Lett., 91: 60005, 2010. doi: 10.1209/0295-5075/91/60005
-
[30]
A. Pechen, C. Brif, R. Wu, R. Chakrabarti, H. Rabitz. General unifying features of controlled quantum phenomena. Phys. Rev. A, 82: 030101, 2010. doi: 10.1103/PhysRevA.82.030101
-
[31]
A. Nanduri, A. Donovan, T.-S. Ho, and H. Rabitz. Exploring quantum control landscape struc- ture. Phys. Rev. A, 88: 033425, 2013. doi: 10.1103/PhysRevA.88.033425
-
[32]
R.-B. Wu, R. Long, J. Dominy, T.-S. Ho and H. Rabitz. Singularities of quantum control landscapes. Phys. Rev. A, 86: 013405, 2012. doi: 10.1103/PhysRevA.86.013405
-
[33]
R. L. Kosut, C. Arenz, and H. Rabitz. Quantum control landscape of bipartite systems. J. Phys. A-Math. Theor., 52: 165305, 2019. doi: 10.1088/1751-8121/ab0dc9
-
[34]
M. Larocca, P. M. Poggi, and D. A. Wisniacki. Quantum control landscape for a two-level system near the quantum speed limit. J. Phys. A-Math. Theor., 51: 385305, 2018. doi: 10.1088/1751- 8121/aad657
-
[35]
B. O. Volkov, O. V. Morzhin, and A. N. Pechen. Quantum control landscape for ultrafast generation of single-qubit phase shift quantum gates. J. Phys. A-Math. Theor., 54: 215303,
-
[36]
doi: 10.1088/1751-8121/abf45d
-
[37]
M. Dalgaard, F. Motzoi, and J. Sherson. Predicting quantum dynamical cost landscapes with deep learning. Phys. Rev. A, 105: 012402, 2022. doi: 10.1103/PhysRevA.105.012402
-
[39]
H. W. Fentaw, S. Campbell, and S. Caton. Exploring quantum control landscape and solution space complexity through dimensionality reduction & optimization algorithms. Sci. Rep., 15: 14605, 2025. doi: 10.1038/s41598-025-95161-0. 11
-
[40]
R. S. Judson and H. Rabitz. Teaching lasers to control molecules. Phys. Rev. Lett., 68: 1500– 1503, 1992. doi: 10.1103/PhysRevLett.68.1500
-
[41]
A. Pechen and H. Rabitz. Teaching the environment to control quantum systems. Phys. Rev. A, 73: 062102, 2006. doi: 10.1103/PhysRevA.73.062102
-
[42]
A. N. Pechen and D. J. Tannor. Quantum control landscape for a Lambda-atom in the vicinity of second-order traps. Isr. J. Chem., 52: 467–472, 2012. doi: 10.1002/ijch.201100165
-
[43]
N. Khaneja, T. Reiss, C. Kehlet, T. Schulte-Herbr¨ uggen, and S. J. Glaser. Optimal control of coupled spin dynamics: design of NMR pulse sequences by gradient ascent algorithms. J. Magn. Reson., 172: 296–305, 2005. doi: 10.1016/j.jmr.2004.11.004
-
[44]
V. N. Petruhanov and A. N. Pechen. GRAPE optimization for open quantum systems with time-dependent decoherence rates driven by coherent and incoherent controls. J. Phys. A: Math. Theor., 56: 305303, 2023. doi: 10.1088/1751-8121/ace13f
-
[45]
A. Oza, A. Pechen, J. Dominy, V. Beltrani, K. Moore, and H. Rabitz. Optimization search effort over the control landscapes for open quantum systems with Kraus-map evolution. J. Phys. A- Math. Theor., 42: 205305, 2009. doi: 10.1088/1751-8113/42/20/205305
-
[46]
O. V. Morzhin and A. N. Pechen. Gradient projection method for constrained quantum control. J. Phys. A-Math. Theor., 58: 135302, 2025. doi: 10.1088/1751-8121/adbe1a
-
[47]
A. N. Pechen. On the analysis of quantum control landscapes using gradient projection method and Pontryagin maximum principle. Lobachevskii J. Math., 46: 2615, 2025. doi: 10.1134/S1995080225607957
-
[49]
R. Eitan, M. Mundt, and D. J. Tannor. Optimal control with accelerated convergence: Combin- ing the Krotov and quasi-Newton methods. Phys. Rev. A, 83: 053426, 2011. doi: 10.1103/Phys- RevA.83.053426
-
[50]
A. A. Myachkova and A. N. Pechen. Some controllable and uncontrollable degener- ate four-level quantum systems. Proc. Steklov Inst. Math., 321: 222–235, 2022. doi: 10.1134/S0081543823020165
-
[51]
S. G. Schirmer, H. Fu, and A. I. Solomon. Complete controllability of quantum systems. Phys. Rev. A, 63: 063410, 2001. doi: 10.1103/PhysRevA.63.063410
-
[52]
A. A. Goldstein. Convex programming in Hilbert space. Bull. Amer. Math. Soc., 70: 709–710,
-
[53]
doi: 10.1090/S0002-9904-1964-11178-2
-
[54]
E. S. Levitin and B. T. Polyak. Constrained minimization methods. USSR Comput. Math. & Math. Phys, 6: 1–50, 1966. doi: 10.1016/0041-5553(66)90114-5. 12
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.