Recognition: 2 theorem links
· Lean TheoremLEAN-3D: Low-latency Hierarchical Point Cloud Codec for Mobile 3D Streaming
Pith reviewed 2026-05-10 19:00 UTC · model grok-4.3
The pith
A hybrid point cloud codec limits learned modeling to uncertain shallow levels and uses deterministic coding deeper to cut mobile streaming latency by 3-5x.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
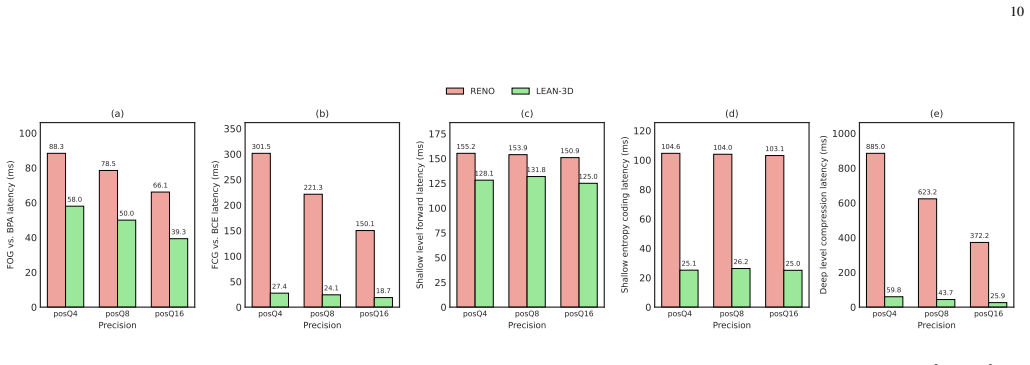
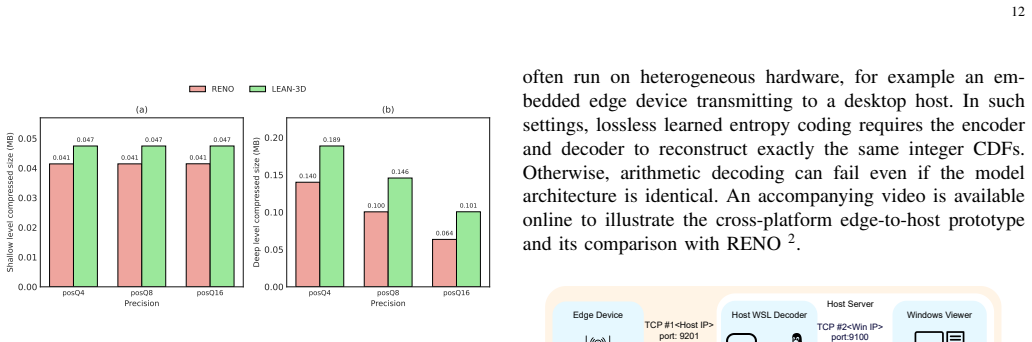
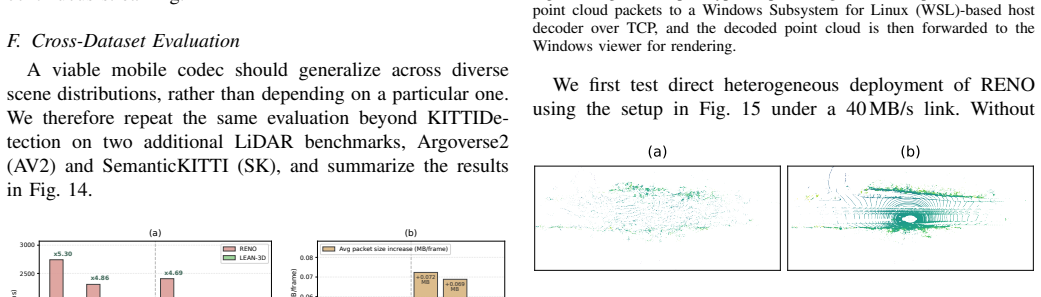
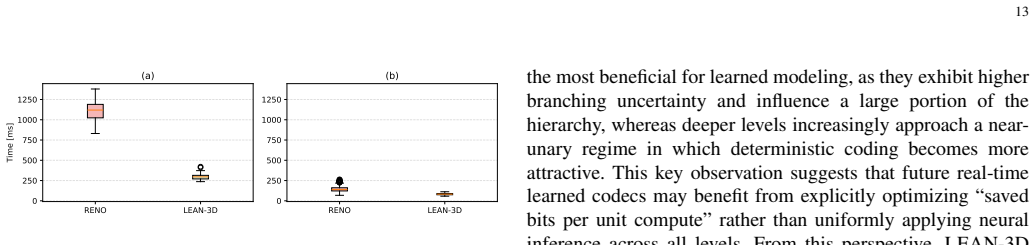
LEAN-3D is a compute-aware point cloud codec that places a lightweight learned occupancy model at the shallow levels of a sparse occupancy hierarchy and develops a lightweight deterministic coding scheme for the deep hierarchy tailored to the near-unary regime. The complete encoder/decoder pipeline resolves numerical inconsistencies in lossless entropy decoding across heterogeneous platforms. When evaluated on an NVIDIA Jetson Orin Nano edge device and desktop host, it delivers 3-5x latency reduction across datasets, up to 5.1x lower total edge-side energy consumption, and lower sustained end-to-end latency under bandwidth-limited streaming.
What carries the argument
The sparse occupancy hierarchy that applies lightweight learned occupancy modeling only at shallow uncertain levels and deterministic coding in the deep hierarchy.
If this is right
- Mobile 3D streaming can operate with sustained low end-to-end latency even when bandwidth is limited.
- Edge devices consume substantially less energy during point cloud encoding and decoding.
- Learned codecs become viable for real-time immersive applications without requiring high-end hardware.
- Cross-platform deployment avoids the numerical inconsistencies that previously caused decoding failures.
Where Pith is reading between the lines
- The selective placement of learned components could extend to other hierarchical media formats such as meshes or voxel grids on edge platforms.
- Reducing neural inference depth might allow integration with existing mobile 3D pipelines that currently rely on traditional codecs.
- Further tests on a wider range of mobile chipsets would clarify whether the energy and latency gains hold under diverse thermal and power constraints.
Load-bearing premise
That the lightweight learned model at shallow levels keeps overall coding efficiency competitive without creating new failure modes when the deterministic deep coding runs on varied hardware.
What would settle it
A side-by-side rate-distortion comparison on the same datasets where LEAN-3D shows worse compression efficiency than prior learned codecs, or a cross-platform test revealing persistent decoding errors or no latency gain on additional mobile devices.
Figures











read the original abstract
We aim to make learned point cloud compression deployable for low-latency streaming on mobile systems. While learned point cloud compression has shown strong coding efficiency, practical deployment on mobile platforms remains challenging because neural inference and entropy coding still incur substantial runtime overhead. This issue is critical for immersive 3D communication, where dense geometry must be delivered under tight end-to-end (E2E) latency and compute constraints. In this paper, we present LEAN-3D, a compute-aware point cloud codec for low-latency streaming. LEAN-3D designs a lightweight learned occupancy model at the shallow levels of a sparse occupancy hierarchy, where structural uncertainty is highest, and develops a lightweight deterministic coding scheme for the deep hierarchy tailored to the near-unary regime. We implement the complete encoder/decoder pipeline and evaluate it on an NVIDIA Jetson Orin Nano edge device and a desktop host. In addition, LEAN-3D addresses the decoding failures observed in cross-platform deployment of learned codecs. Such failures arise from numerical inconsistencies in lossless entropy decoding across heterogeneous platforms. Experiments show that LEAN-3D achieves 3-5x latency reduction across datasets, reduces total edge-side energy consumption by up to 5.1x, and delivers lower sustained E2E latency under bandwidth-limited streaming. These results bring learned point cloud compression closer to deployable mobile 3D streaming.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces LEAN-3D, a compute-aware point cloud codec for low-latency mobile 3D streaming. It combines a lightweight learned occupancy model at shallow levels of a sparse occupancy hierarchy (where structural uncertainty is highest) with a deterministic coding scheme for the deep hierarchy in the near-unary regime. The authors implement the full encoder/decoder pipeline, evaluate it on an NVIDIA Jetson Orin Nano edge device paired with a desktop host, and address cross-platform decoding failures arising from numerical inconsistencies in lossless entropy decoding. Experiments report 3-5x latency reduction across datasets, up to 5.1x reduction in total edge-side energy consumption, and lower sustained end-to-end latency under bandwidth-limited streaming.
Significance. If the reported measurements hold, the work meaningfully advances practical deployment of learned point cloud compression for immersive applications. By demonstrating concrete latency and energy gains on real mobile hardware while maintaining competitive rate-distortion behavior through the hybrid learned-deterministic design, and by providing a concrete fix for cross-platform entropy decoding inconsistencies, the paper supplies an engineering pathway that brings learned codecs closer to real-time 3D streaming constraints.
major comments (2)
- [Section 4, Figure 5, Table 2] Section 4 (Experiments), Figure 5 and Table 2: the rate-distortion curves and BD-rate numbers are presented relative to a small set of baselines, but the paper does not report error bars or multiple random seeds for the learned occupancy model; this leaves open whether the claimed preservation of coding efficiency is statistically robust across the reported datasets.
- [Section 3.2] Section 3.2 (Deterministic Deep Coding): the claim that the deterministic scheme introduces no new failure modes on heterogeneous platforms is supported only by the cross-platform consistency fix; a direct ablation showing the impact on reconstruction quality when the deterministic path is replaced by a learned alternative would strengthen the central efficiency claim.
minor comments (3)
- [Section 2, Algorithm 1] The notation for the sparse occupancy hierarchy levels (shallow vs. deep) is introduced in Section 2 but used inconsistently in the pseudocode of Algorithm 1; a single consistent definition would improve readability.
- [Section 4.3] Energy measurements in Section 4.3 are reported as total edge-side consumption; clarifying whether this includes only inference or also I/O and entropy coding overhead would make the 5.1x figure easier to interpret.
- [Abstract, Section 1] The abstract and introduction cite '3-5x latency reduction' without specifying the exact baseline codec and platform configuration for each number; adding a short table mapping each multiplier to its reference would aid quick assessment.
Simulated Author's Rebuttal
We thank the referee for the constructive review and the recommendation for minor revision. We address each major comment below, providing clarifications and indicating revisions made to strengthen the manuscript where appropriate.
read point-by-point responses
-
Referee: Section 4 (Experiments), Figure 5 and Table 2: the rate-distortion curves and BD-rate numbers are presented relative to a small set of baselines, but the paper does not report error bars or multiple random seeds for the learned occupancy model; this leaves open whether the claimed preservation of coding efficiency is statistically robust across the reported datasets.
Authors: We agree that statistical robustness across training runs would better support the rate-distortion claims. The learned occupancy model was trained with a fixed random seed in the original experiments to ensure reproducibility. To address this concern, we have re-trained the model using three different random seeds and recomputed the rate-distortion curves and BD-rate values. The observed variations are small (under 0.4% in BD-rate across datasets), confirming that the hybrid design preserves coding efficiency consistently. We have updated Figure 5 and Table 2 to include error bars in the revised manuscript. revision: yes
-
Referee: Section 3.2 (Deterministic Deep Coding): the claim that the deterministic scheme introduces no new failure modes on heterogeneous platforms is supported only by the cross-platform consistency fix; a direct ablation showing the impact on reconstruction quality when the deterministic path is replaced by a learned alternative would strengthen the central efficiency claim.
Authors: We appreciate the suggestion for an ablation. However, replacing the deterministic coding with a learned alternative at deep levels would require implementing and training additional neural models for the near-unary regime, which would negate the latency and energy benefits central to LEAN-3D. The deterministic scheme uses only integer arithmetic and is lossless by design, introducing no reconstruction quality degradation. We have expanded the discussion in Section 3.2 to explicitly explain that the scheme avoids floating-point operations, thereby eliminating numerical inconsistencies on heterogeneous platforms beyond what the cross-platform fix already addresses. This clarification reinforces the efficiency rationale without an impractical ablation. revision: partial
Circularity Check
No significant circularity
full rationale
The paper describes an engineering system (LEAN-3D) that combines a lightweight learned occupancy model at shallow hierarchy levels with a deterministic coding scheme at deeper levels, followed by full pipeline implementation and hardware measurements on Jetson Orin Nano and desktop. No equations, fitted parameters, or first-principles derivations are presented whose outputs reduce by construction to the inputs. Performance claims (latency, energy, E2E latency) rest on direct experimental evaluation across datasets rather than any self-referential prediction or self-citation chain. The design is presented as a practical combination of existing techniques with platform-specific fixes, making the central claims self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We observe a shift in occupancy statistics across the hierarchy... unary fraction counts nodes with popcount(O)=1... Ds as the first level at which this ratio exceeds 60%
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
8-bit occupancy code O(d)(v) ∈ {0,...,255}... popcount(O(d)(v)) ≈ 1 for large d
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Emerging MPEG standards for point cloud compression,
S. Schwarz, M. Preda, V . Baroncini, M. Budagavi, P. Cesar, P. A. Chou, R. A. Cohen, M. Krivoku ´ca, S. Lasserre, Z. Liet al., “Emerging MPEG standards for point cloud compression,”IEEE Journal on Emerging and Selected Topics in Circuits and Systems, vol. 9, no. 1, pp. 133–148, 2019
2019
-
[2]
An overview of ongoing point cloud compression stan- dardization activities: Video-based (V-PCC) and geometry-based (G- PCC),
D. Graziosi, O. Nakagami, S. Kuma, A. Zaghetto, T. Suzuki, and A. Tabatabai, “An overview of ongoing point cloud compression stan- dardization activities: Video-based (V-PCC) and geometry-based (G- PCC),”APSIPA Transactions on Signal and Information Processing, vol. 9, p. e13, 2020
2020
-
[3]
What’s new in point cloud compres- sion?
C. Cao, M. Preda, and T. Zaharia, “What’s new in point cloud compres- sion?”Global J. Eng. Sci., vol. 4, no. 5, 2020
2020
-
[4]
The tactile internet,
ITU-T Technology Watch, “The tactile internet,” Aug. 2014
2014
-
[5]
The tactile internet: Applications and challenges,
G. P. Fettweis, “The tactile internet: Applications and challenges,”IEEE Vehicular Technology Magazine, 2014
2014
-
[6]
TR 38.913: Study on scenarios and requirements for next generation access technologies,
3GPP, “TR 38.913: Study on scenarios and requirements for next generation access technologies,” 3rd Generation Partnership Project, Tech. Rep., 2020
2020
-
[7]
Survey on deep learning-based point cloud compression,
M. Quach, J. Pang, D. Tian, G. Valenzise, and F. Dufaux, “Survey on deep learning-based point cloud compression,”Frontiers in Signal Processing, vol. 2, p. 846972, 2022
2022
-
[8]
Deep learning- based point cloud compression: An in-depth survey and benchmark,
W. Gao, L. Xie, S. Fan, G. Li, S. Liu, and W. Gao, “Deep learning- based point cloud compression: An in-depth survey and benchmark,” IEEE Transactions on Pattern Analysis and Machine Intelligence, 2025
2025
-
[9]
Real-time compression of point cloud streams,
J. Kammerl, N. Blodow, R. B. Rusu, S. Gedikli, M. Beetz, and E. Steinbach, “Real-time compression of point cloud streams,” in2012 IEEE International Conference on Robotics and Automation (ICRA), 2012, pp. 778–785
2012
-
[10]
Reno: Real-time neural compression for 3d lidar point clouds,
K. You, T. Chen, D. Ding, M. S. Asif, and Z. Ma, “Reno: Real-time neural compression for 3d lidar point clouds,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2025
2025
-
[11]
RFC 9330: Low latency, low loss, scalable throughput (L4S) internet service: Architecture,
IETF, “RFC 9330: Low latency, low loss, scalable throughput (L4S) internet service: Architecture,” https://www.rfc-editor.org/rfc/rfc9330. html, 2023
2023
-
[12]
Real-time point cloud data transmission via l4s for 5g-edge- assisted robotics,
G. Damigos, A. S. Seisa, N. Stathoulopoulos, S. Sandberg, and G. Niko- lakopoulos, “Real-time point cloud data transmission via l4s for 5g-edge- assisted robotics,”arXiv preprint arXiv:2511.15677, 2025
-
[13]
J. Duda, “Asymmetric numeral systems: entropy coding combining speed of huffman coding with compression rate of arithmetic coding,” arXiv preprint arXiv:1311.2540, 2013
work page Pith review arXiv 2013
-
[14]
Interleaved entropy coders,
F. Giesen, “Interleaved entropy coders,” https://fgiesen.wordpress.com/ 2014/02/18/rans-in-practice/, 2014
2014
-
[15]
Efficient storage and retrieval by content and address of static files,
P. Elias, “Efficient storage and retrieval by content and address of static files,”Journal of the ACM, vol. 21, no. 2, pp. 246–260, 1974
1974
-
[16]
Quasi-succinct indices,
S. Vigna, “Quasi-succinct indices,” inProceedings of the sixth ACM international conference on Web search and data mining, 2013, pp. 83– 92
2013
-
[17]
Information technology — coded representation of immersive media — part 9: Geometry-based point cloud compression (G-PCC), ISO/IEC 23090-9:2023,
ISO/IEC, “Information technology — coded representation of immersive media — part 9: Geometry-based point cloud compression (G-PCC), ISO/IEC 23090-9:2023,” 2023, international Standard
2023
-
[18]
——, “Information technology — coded representation of immersive media — part 5: Visual volumetric video-based coding (V3C) and video- based point cloud compression (V-PCC), ISO/IEC 23090-5:2021,” 2021, international Standard
2021
-
[19]
Draco: 3d data compression (meshes and point clouds),
Google, “Draco: 3d data compression (meshes and point clouds),” https: //github.com/google/draco, accessed in April, 2026, software repository
2026
-
[20]
Octree-based point-cloud compression,
R. Schnabel and R. Klein, “Octree-based point-cloud compression,” in Proceedings of the Symposium on Point-Based Graphics, 2006
2006
-
[21]
Real-time point cloud compression,
T. Golla and R. Klein, “Real-time point cloud compression,” in2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2015, pp. 5087–5092
2015
-
[22]
Compressing ros sensor and geometry messages with draco,
T. Wiemann, F. Igelbrink, S. P ¨utz, M. K. Piening, S. Schupp, S. Hin- derink, J. Vana, and J. Hertzberg, “Compressing ros sensor and geometry messages with draco,” in2019 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), 2019, pp. 243–248
2019
-
[23]
Content-aware adaptive point cloud delivery,
Y . Alkhalili, T. Gruczyk, T. Meuser, A. F. Anta, A. Khalil, and A. Mau- the, “Content-aware adaptive point cloud delivery,” in2022 IEEE Eighth International Conference on Multimedia Big Data (BigMM), 2022, pp. 13–20
2022
-
[24]
A comprehensive study and comparison of core technologies for mpeg 3d point cloud compression,
H. Liu, H. Yuan, Q. Liu, J. Hou, and J. Liu, “A comprehensive study and comparison of core technologies for mpeg 3d point cloud compression,” IEEE Transactions on Broadcasting, vol. 66, no. 3, pp. 701–717, 2020
2020
-
[25]
Learning- based lossless compression of 3d point cloud geometry,
D. T. Nguyen, M. Quach, G. Valenzise, and P. Duhamel, “Learning- based lossless compression of 3d point cloud geometry,” pp. 4220–4224, 2021
2021
-
[26]
8i vox- elized full bodies – a voxelized point cloud dataset,
E. d’Eon, B. Harrison, T. Myers, and P. A. Chou, “8i vox- elized full bodies – a voxelized point cloud dataset,” 2017, iSO/IEC JTC1/SC29 Joint WG11/WG1 (MPEG/JPEG) input document WG11M40059/WG1M74006, Geneva, January 2017
2017
-
[27]
Octattention: Octree-based large-scale contexts model for point cloud compression,
C. Fu, G. Li, R. Song, W. Gao, and S. Liu, “Octattention: Octree-based large-scale contexts model for point cloud compression,” inProceedings of the AAAI Conference on Artificial Intelligence, 2022
2022
-
[28]
Semantickitti: A dataset for semantic scene understanding of lidar sequences,
J. Behley, M. Garbade, A. Milioto, J. Quenzel, S. Behnke, C. Stachniss, and J. Gall, “Semantickitti: A dataset for semantic scene understanding of lidar sequences,” inProceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), 2019, pp. 9297–9307
2019
-
[29]
Efficient hierarchical entropy model for learned point cloud compression,
R. Song, G. Li, C. Fu, W. Gao, and S. Liu, “Efficient hierarchical entropy model for learned point cloud compression,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2023
2023
-
[30]
Multiscale point cloud geometry compression,
J. Wang, D. Ding, Z. Li, and Z. Ma, “Multiscale point cloud geometry compression,” in2021 Data Compression Conference (DCC). IEEE, 2021, pp. 73–82
2021
-
[31]
Are we ready for autonomous driving? the kitti vision benchmark suite,
A. Geiger, P. Lenz, and R. Urtasun, “Are we ready for autonomous driving? the kitti vision benchmark suite,” inProceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2012, pp. 3354–3361. 15
2012
-
[32]
Octsqueeze: Octree-structured entropy model for lidar compression,
L. Huang, S. Wang, K. Wong, J. Liu, and R. Urtasun, “Octsqueeze: Octree-structured entropy model for lidar compression,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2020, pp. 1313–1323
2020
-
[33]
A review of 6-dof volumetric video communication systems: Ai empowered perspectives,
Y . Huang, Y . Gao, Y . Zhu, Z. Chen, R. Sidhu, X. Qiao, Q. Zhang, and X. Su, “A review of 6-dof volumetric video communication systems: Ai empowered perspectives,”IEEE Communications Surveys & Tutorials, 2026, to appear
2026
-
[34]
Learning convolutional trans- forms for lossy point cloud geometry compression,
M. Quach, G. Valenzise, and F. Dufaux, “Learning convolutional trans- forms for lossy point cloud geometry compression,” in2019 IEEE international conference on image processing (ICIP). IEEE, 2019, pp. 4320–4324
2019
-
[35]
Learned point cloud geometry compression,
J. Wang, H. Zhu, Z. Ma, T. Chen, H. Liu, and Q. Shen, “Learned point cloud geometry compression,”arXiv preprint arXiv:1909.12037, 2019
-
[36]
Multiscale deep context modeling for lossless point cloud geometry compression,
D. T. Nguyen, M. Quach, G. Valenzise, and P. Duhamel, “Multiscale deep context modeling for lossless point cloud geometry compression,” in2021 IEEE International Conference on Multimedia & Expo Work- shops (ICMEW). IEEE, 2021, pp. 1–6
2021
-
[37]
Ecm-opcc: Efficient context model for octree-based point cloud compression,
Y . Liuet al., “Ecm-opcc: Efficient context model for octree-based point cloud compression,”arXiv preprint arXiv:2211.10916, 2022
-
[38]
Sparse tensor- based multiscale representation for point cloud geometry compression,
J. Wang, D. Ding, Z. Li, X. Feng, C. Cao, and Z. Ma, “Sparse tensor- based multiscale representation for point cloud geometry compression,” arXiv preprint arXiv:2111.10633, 2021
-
[39]
Hint: Hierarchical inter-frame correlation for one-shot point cloud sequence compression,
Y . Gao and Q. Zhang, “Hint: Hierarchical inter-frame correlation for one-shot point cloud sequence compression,”arXiv preprint arXiv:2509.14859, 2025
-
[40]
Practical full resolution learned lossless image compression,
F. Mentzer, E. Agustsson, M. Tschannen, R. Timofte, and L. Van Gool, “Practical full resolution learned lossless image compression,” inPro- ceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2019
2019
-
[41]
Argoverse 2: Next Generation Datasets for Self-Driving Perception and Forecasting
B. Wilson, W. Qi, T. Agarwal, J. Lambert, J. Singh, S. Khandelwal, B. Pan, R. Kumar, A. Hartnett, J. K. Pontes, D. Ramanan, P. Carr, and J. Hays, “Argoverse 2: Next generation datasets for self-driving perception and forecasting,”arXiv preprint arXiv:2301.00493, 2023. Yuchen Gaois a Marie Skłodowska-Curie Ac- tions Doctoral Candidate (MSCA DC) with the De...
work page internal anchor Pith review arXiv 2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.