Shortcuts to state transitions for active matter
Pith reviewed 2026-05-10 19:19 UTC · model grok-4.3
The pith
Active matter systems reach target states along geodesics of minimal dissipation via an auxiliary potential.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We develop a shortcut framework to realize swift state transitions for active systems operating in the weak activity regime. An auxiliary potential is introduced to guide the system along a predefined distribution path, allowing it to reach the target state within a finite time. Considering unavoidable energy cost in such a finite-time process, we derive a thermodynamic metric from the dissipative work to induce a Riemann manifold on the space spanned by the control parameters. The optimal protocol with minimum dissipative work is then identical to the geodesic path in the geometric space. We demonstrate this framework by considering active systems confined in an external harmonic trap and a
What carries the argument
A thermodynamic metric constructed from dissipative work that turns the space of control parameters into a Riemann manifold, making the lowest-dissipation protocol the geodesic on that manifold.
If this is right
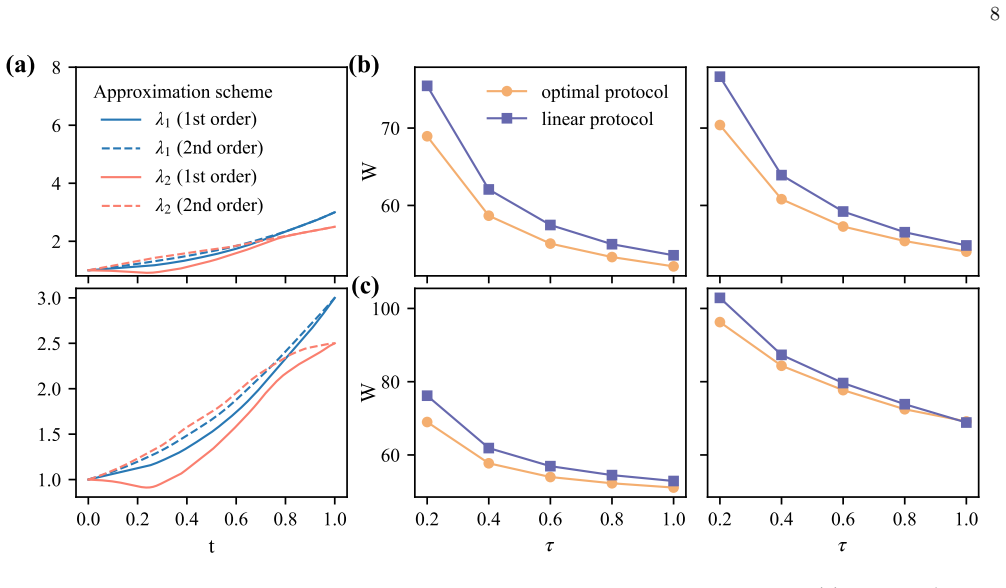
- Geodesic protocols reduce dissipative work relative to linear protocols in weakly active systems.
- The method applies to both attractive harmonic interactions and repulsive Gaussian-core interactions between particles.
- A variational approximation supplies usable controls when the exact auxiliary potential cannot be derived analytically.
- Finite-time transitions become feasible with less wasted energy whenever controls can be tuned in an external trap and internal potential.
Where Pith is reading between the lines
- The same geometric construction could be tested on other driven non-equilibrium systems such as vibrated granular media or colloidal swimmers.
- If the weak-activity restriction can be relaxed, the approach might guide design of energy-efficient protocols for biological active matter.
- Experimental colloidal setups with optical traps could directly compare measured dissipation along geodesic versus linear paths.
- The metric might be generalized to include additional control variables such as temperature or chemical potential.
Load-bearing premise
The activity must stay weak enough that the added auxiliary potential can still steer the system along the chosen path before the particles' own directed motion dominates.
What would settle it
Measure total dissipative work for an active Brownian particle in a tunable harmonic trap under both the calculated geodesic protocol and a linear ramp; if the geodesic consistently produces lower work, the claim holds.
Figures


read the original abstract
Shortcut schemes can accelerate quasi-static processes in passive systems by adding auxiliary controls to realize swift transitions between equilibrium states. In active systems, however, inherently directed motion driven by free energy consumption continually drives the system away from equilibrium. In this work, we develop a shortcut framework to realize swift state transitions for active systems operating in the weak activity regime. An auxiliary potential is introduced to guide the system along a predefined distribution path, allowing it to reach the target state within a finite time. Considering unavoidable energy cost in such a finite-time process, we derive a thermodynamic metric from the dissipative work to induce a Riemann manifold on the space spanned by the control parameters. The optimal protocol with minimum dissipative work is then identical to the geodesic path in the geometric space. We demonstrate this framework by considering active systems confined in an external harmonic trap and interacting via two distinct internal potentials, respectively: an attractive harmonic coupling and a repulsive pairwise Gaussian-core coupling. The strengths of both the external trap and the internal interactions are controllable. For the latter case, since the auxiliary potential can not be derived precisely, we adopt a variational method to obtain an approximate auxiliary control. Compared to linear protocols, the geodesic protocols can effectively reduce dissipation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript develops a shortcut framework for finite-time state transitions in weakly active systems. An auxiliary potential is introduced to steer the probability density along a prescribed path; dissipative work is then used to define a thermodynamic metric on the space of control parameters, so that the minimal-dissipation protocol is the geodesic on the resulting Riemannian manifold. The construction is illustrated for active particles in a harmonic trap whose strength and internal interaction strength are controllable, first with attractive harmonic coupling (exact auxiliary potential) and then with repulsive Gaussian-core coupling (variational approximation for the auxiliary potential). Geodesic protocols are reported to reduce dissipation relative to linear ramps.
Significance. If the central equivalence between minimal dissipative work and the geodesic survives the approximation, the work supplies a geometric design principle for low-dissipation driving of active matter, extending the passive-system shortcut literature. The explicit derivation of the metric from excess work and the concrete comparison for two interaction potentials are clear strengths.
major comments (2)
- [Gaussian-core interactions] Gaussian-core section: the auxiliary potential is obtained only variationally, so the instantaneous distribution necessarily deviates from the prescribed path used to derive the metric. Because the geodesic is the Euler-Lagrange solution of the exact work functional, the reported geodesic need not minimize the true integrated dissipation once the approximate control is inserted into the dynamics; no error bound or path-deviation diagnostic is supplied to quantify the discrepancy.
- [Derivation of the thermodynamic metric] The thermodynamic metric is constructed under the assumption that the auxiliary potential enforces the chosen path exactly at every instant. This assumption holds for the harmonic-interaction case but is relaxed for the Gaussian-core case; the manuscript does not show that the geodesic property remains approximately valid once the variational error is restored.
minor comments (2)
- [Introduction] The weak-activity regime is invoked throughout but never given an explicit bound (e.g., in terms of the Péclet number or the ratio of active to thermal forces); a quantitative criterion would clarify the domain of validity.
- [Numerical results] Figure captions and axis labels for the dissipation comparisons should state the precise definition of 'dissipative work' used (excess work relative to the quasi-static value) and the number of independent trajectories averaged.
Simulated Author's Rebuttal
We thank the referee for the careful reading, positive assessment of the work, and the constructive comments. We address the two major comments point by point below, indicating the revisions we will make to the manuscript.
read point-by-point responses
-
Referee: [Gaussian-core interactions] Gaussian-core section: the auxiliary potential is obtained only variationally, so the instantaneous distribution necessarily deviates from the prescribed path used to derive the metric. Because the geodesic is the Euler-Lagrange solution of the exact work functional, the reported geodesic need not minimize the true integrated dissipation once the approximate control is inserted into the dynamics; no error bound or path-deviation diagnostic is supplied to quantify the discrepancy.
Authors: We agree that the variational approximation for the auxiliary potential necessarily introduces deviations from the exact target path in the Gaussian-core case. In the revised manuscript we will add numerical diagnostics that plot the L2 deviation between the instantaneous simulated density and the prescribed target path for both the geodesic and linear protocols. These diagnostics will quantify the approximation error throughout the driving process. We will also clarify in the text that the reported geodesic is the minimum-dissipation protocol within the variational approximation and demonstrate numerically that it still yields lower integrated dissipation than linear ramps. revision: yes
-
Referee: [Derivation of the thermodynamic metric] The thermodynamic metric is constructed under the assumption that the auxiliary potential enforces the chosen path exactly at every instant. This assumption holds for the harmonic-interaction case but is relaxed for the Gaussian-core case; the manuscript does not show that the geodesic property remains approximately valid once the variational error is restored.
Authors: The thermodynamic metric is derived under the exact-path-enforcement assumption, which is satisfied precisely only for the harmonic-interaction case. For the Gaussian-core interactions we will revise the manuscript to state explicitly that the geodesic is optimal only within the variational approximation and that a rigorous proof of its approximate optimality under the restored variational error lies outside the present scope. At the same time we will strengthen the numerical evidence by reporting the actual dissipative work for the geodesic protocol (computed from the simulated trajectories) and confirming that it remains lower than that of the linear ramp, thereby supporting the practical utility of the geometric construction even with the approximation. revision: partial
Circularity Check
No significant circularity; geodesic claim follows from metric definition
full rationale
The paper derives a thermodynamic metric explicitly from the dissipative work functional and states that the minimum-dissipation protocol is the geodesic on the induced manifold. This equivalence is a direct mathematical consequence of the definition of geodesics as curves minimizing the length functional (here identified with integrated dissipation) and does not reduce any result to a fitted parameter, self-citation chain, or hidden ansatz. The harmonic-trap case admits exact auxiliary control; the Gaussian-core case uses an acknowledged variational approximation whose limitations are stated rather than concealed. No load-bearing self-citations or renamings of known results appear in the derivation chain. The framework is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The system operates in the weak activity regime
invented entities (1)
-
auxiliary potential
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
The optimal protocol with minimum dissipative work is then identical to the geodesic path in the geometric space... W_d = ∫ dt λ̇_μ λ̇_ν g_μν with g_μν = ⟨(∇_i f_μ)·(∇_i f_ν)⟩
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
auxiliary potential U_a ... variational functionals G_μ(f_μ) ≡ ⟨[D_μ(f_μ)]²⟩ ... geodesic equations
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Forward citations
Cited by 1 Pith paper
-
Self-propulsion protocols for swift non-equilibrium state transitions and enhanced cooling in active systems
Self-propulsion noise statistics define speed limits on non-equilibrium transitions in active matter, with non-stationary initials allowing faster cooling than passive protocols.
Reference graph
Works this paper leans on
- [1]
- [2]
- [3]
- [4]
-
[5]
M. E. Cates and J. Tailleur, Annu. Rev. Conden. Ma. P. 6, 219 (2015)
work page 2015
-
[6]
I. Buttinoni, G. Volpe, F. Kümmel, G. Volpe, and C. Bechinger, J. Phys. Condens. Matter24, 284129 (2012)
work page 2012
- [7]
- [8]
-
[9]
G. Gompper, R. G. Winkler, T. Speck, A. Solon, C. Nar- dini, F. Peruani, H. Löwen, R. Golestanian, U. B. Kaupp, L. Alvarez,et al., J. Phys. Condens. Matter32, 193001 (2020)
work page 2020
- [10]
-
[11]
Q. Wang, L. Yang, J. Yu, C.-I. Vong, P. W. Y. Chiu, and L. Zhang, in2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)(IEEE, 2018) pp. 5380–5385
work page 2018
-
[12]
H. Yu, Y. Fu, X. Zhang, L. Chen, D. Qi, J. Shi, and W. Wang, Program. Mater.1, e7 (2023)
work page 2023
- [13]
-
[14]
P. Pietzonka, É. Fodor, C. Lohrmann, M. E. Cates, and U. Seifert, Phys. Rev. X9, 041032 (2019)
work page 2019
-
[15]
M. Sun, W. Chen, X. Fan, C. Tian, L. Sun, and H. Xie, Appl. Mater. Today20, 100682 (2020)
work page 2020
-
[16]
S. Vaikuntanathan and C. Jarzynski, Phys. Rev. Lett. 100, 190601 (2008)
work page 2008
-
[17]
S. Vaikuntanathan and C. Jarzynski, J. Chem. Phys. 134, 054107 (2011)
work page 2011
-
[18]
A. Le Cunuder, I. A. Martínez, A. Petrosyan, D. Guéry- Odelin, E. Trizac, and S. Ciliberto, Appl. Phys. Lett. 109, 113502 (2016)
work page 2016
-
[19]
I.A.Martínez, A.Petrosyan, D.Guéry-Odelin, E.Trizac, and S. Ciliberto, Nat. Phys.12, 843 (2016)
work page 2016
-
[20]
G. Li, H. T. Quan, and Z. C. Tu, Phys. Rev. E96, 012144 (2017)
work page 2017
-
[21]
A. G. Frim, A. Zhong, S.-F. Chen, D. Mandal, and M. R. DeWeese, Phys. Rev. E103, L030102 (2021)
work page 2021
-
[22]
D. Guéry-Odelin, C. Jarzynski, C. A. Plata, A. Prados, and E. Trizac, Rep. Prog. Phys.86, 035902 (2023)
work page 2023
-
[23]
G. E. Crooks, Phys. Rev. Lett.99, 100602 (2007)
work page 2007
-
[24]
D. A. Sivak and G. E. Crooks, Phys. Rev. Lett.108, 190602 (2012)
work page 2012
- [25]
-
[26]
Z.WangandJ.Ren,Phys.Rev.Lett.132,207101(2024)
work page 2024
-
[27]
Y. Wang, E. Lei, Y.-H. Ma, Z. C. Tu, and G. Li, Phys. Rev. E112, 054124 (2025)
work page 2025
- [28]
- [29]
- [30]
- [31]
- [32]
-
[36]
C. Bechinger, R. Di Leonardo, H. Löwen, C. Reichhardt, G. Volpe, and G. Volpe, Rev. Mod. Phys.88, 045006 (2016)
work page 2016
- [37]
-
[38]
R. Wittmann, C. Maggi, A. Sharma, A. Scacchi, J. M. Brader, and U. M. B. Marconi, J. Stat. Mech: Theory Exp.2017, 113207 (2017)
work page 2017
-
[39]
R. Bellman, R. Bellman, and R. Corporation,Dynamic Programming, Rand Corporation research study (Prince- ton University Press, 1957)
work page 1957
-
[40]
R. Bellman,Adaptive Control Processes: A Guided Tour, Princeton Legacy Library (Princeton University Press, 2015)
work page 2015
- [41]
-
[42]
M. Kolodrubetz, D. Sels, P. Mehta, and A. Polkovnikov, Phys. Rep.697, 1 (2017)
work page 2017
- [43]
- [44]
-
[45]
M.E.NewmanandG.T.Barkema,Monte Carlo methods in statistical physics(Clarendon Press, 1999). 10
work page 1999
-
[48]
P. Romanczuk, M. Bär, W. Ebeling, B. Lindner, and L. Schimansky-Geier, Eur. Phys. J. Special Topics202, 1 (2012)
work page 2012
-
[49]
A. S. Mikhailov and D. H. Zanette, Phys. Rev. E60, 4571 (1999)
work page 1999
- [50]
- [51]
-
[52]
F. Schweitzer, W. Ebeling, and B. Tilch, Phys. Rev. E 64, 021110 (2001)
work page 2001
-
[53]
F. H. Stillinger, J. Chem. Phys.65, 3968 (1976)
work page 1976
-
[54]
S. Prestipino, F. Saija, and P. V. Giaquinta, Phys. Rev. Lett.106, 235701 (2011)
work page 2011
- [55]
- [56]
-
[57]
S. Whitelam, C. Casert, M. Engel, and I. Tam- blyn, arXiv:2506.15122 (2025), arXiv:2506.15122 [cond- mat.stat-mech]
-
[58]
I+ Daτp 1 +D a Λ −1 Λ−1C #2 rα + nDaτp 4 Tr
A. Zhong, B. Kuznets-Speck, and M. R. DeWeese, Phys. Rev. E110, 034121 (2024). Supplementary Material: Shortcuts to state transitions for active matter Guodong Cheng,1 Z. C. Tu,1 and Geng Li2,∗ 1School of Physics and Astronomy, Beijing Normal University, Beijing 100875, China 2School of Systems Science, Beijing Normal University, Beijing 100875, China CON...
work page 2024
-
[59]
E. A. Novikov, Sov. Phys. JETP20, 1290 (1965)
work page 1965
-
[60]
R. F. Fox, Phys. Rev. A33, 467 (1986)
work page 1986
-
[61]
T. F. F. Farage, P. Krinninger, and J. M. Brader, Phys. Rev. E91, 042310 (2015)
work page 2015
- [62]
- [63]
- [64]
- [65]
-
[66]
G. D. Smith,Numerical solution of partial differential equations: finite difference methods(Oxford university press, 1985)
work page 1985
-
[67]
S. C. Brenner and L. R. Scott,The mathematical theory of finite element methods(Springer, 2008)
work page 2008
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.