Recognition: 2 theorem links
· Lean TheoremPD-SOVNet: A Physics-Driven Second-Order Vibration Operator Network for Estimating Wheel Polygonal Roughness from Axle-Box Vibrations
Pith reviewed 2026-05-10 18:34 UTC · model grok-4.3
The pith
A physics-guided network embeds second-order vibration kernels to estimate multi-order wheel roughness spectra from axle-box signals.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
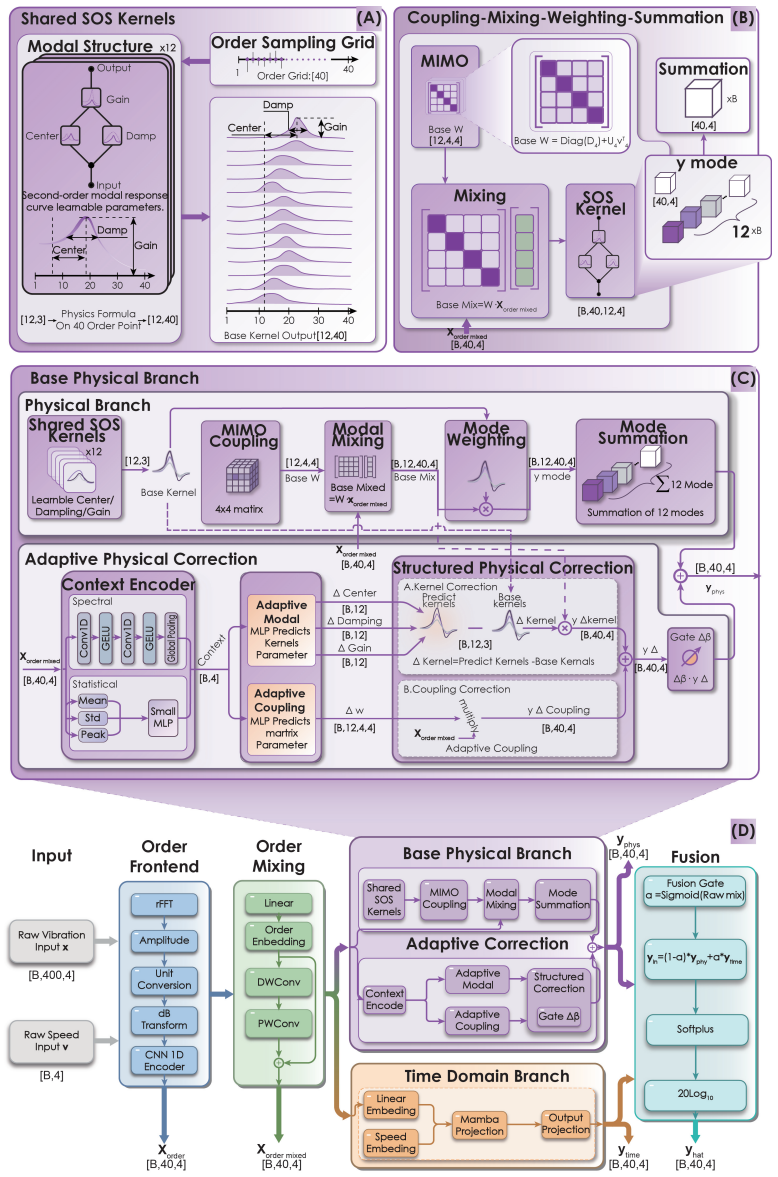
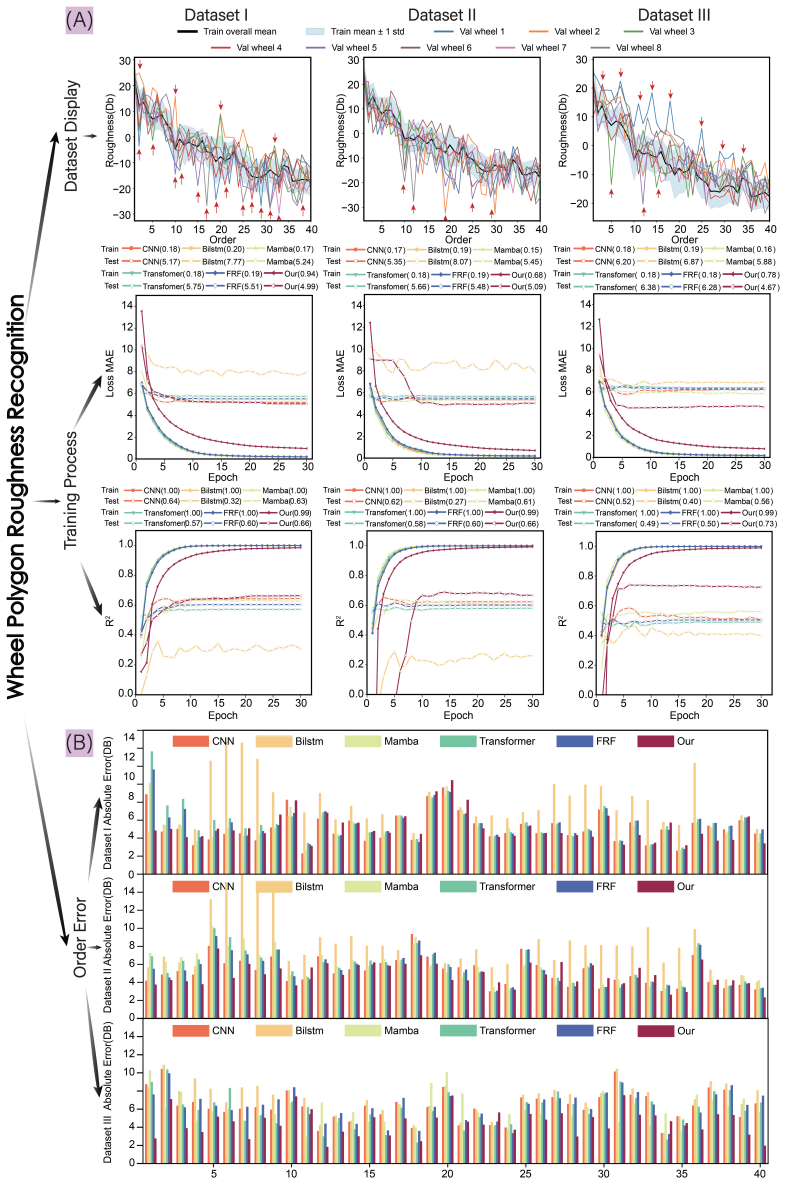
PD-SOVNet combines shared second-order vibration kernels to embed modal-response priors, a 4x4 MIMO coupling module, an adaptive physical correction branch, and a Mamba-based temporal branch to regress the 1st-40th-order wheel roughness spectrum. Experiments on three real-world datasets show competitive prediction accuracy and relatively stable cross-wheel performance, with the clearest gains on the more challenging Dataset III. Noise-injection tests indicate the Mamba branch reduces degradation under perturbed inputs, suggesting that structured physical priors help stabilize regression in practical rail-vehicle monitoring.
What carries the argument
Shared second-order vibration kernels that embed modal-response priors from wheel-rail dynamics into the network while allowing sample-dependent correction.
If this is right
- Enables continuous quantitative regression of the full roughness spectrum instead of discrete detection or severity classes.
- Delivers more stable performance across different wheels under current real-data protocols.
- The Mamba temporal branch provides measurable robustness when input vibrations contain added noise or perturbations.
- Structured physical priors can be combined with data-driven flexibility to improve regression stability in rail condition monitoring.
Where Pith is reading between the lines
- The same kernel-plus-correction pattern could transfer to vibration-based estimation tasks in other rotating machinery where modal priors are known.
- Performance on Dataset III suggests the method may scale to more diverse operational fleets if the priors are validated across additional wheel profiles.
- Integration with existing axle-box sensors could allow real-time spectrum tracking that feeds directly into wear-prediction models.
Load-bearing premise
The modal-response priors captured by the second-order kernels generalize accurately to unseen wheels and varying real operating conditions without introducing systematic bias.
What would settle it
A clear drop in accuracy or increase in cross-wheel variability on a new real-world dataset collected from different wheel types, speeds, or unrepresented fault conditions would show the priors fail to generalize as claimed.
Figures
















read the original abstract
Quantitative estimation of wheel polygonal roughness from axle-box vibration signals is a challenging yet practically relevant problem for rail-vehicle condition monitoring. Existing studies have largely focused on detection, identification, or severity classification, while continuous regression of multi-order roughness spectra remains less explored, especially under real operational data and unseen-wheel conditions. To address this problem, this paper presents PD-SOVNet, a physics-guided gray-box framework that combines shared second-order vibration kernels, a $4\times4$ MIMO coupling module, an adaptive physical correction branch, and a Mamba-based temporal branch for estimating the 1st--40th-order wheel roughness spectrum from axle-box vibrations. The proposed design embeds modal-response priors into the model while retaining data-driven flexibility for sample-dependent correction and residual temporal dynamics. Experiments on three real-world datasets, including operational data and real fault data, show that the proposed method provides competitive prediction accuracy and relatively stable cross-wheel performance under the current data protocol, with its most noticeable advantage observed on the more challenging Dataset III. Noise injection experiments further indicate that the Mamba temporal branch helps mitigate performance degradation under perturbed inputs. These results suggest that structured physical priors can be beneficial for stabilizing roughness regression in practical rail-vehicle monitoring scenarios, although further validation under broader operating conditions and stricter comparison protocols is still needed.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims to present PD-SOVNet, a physics-driven second-order vibration operator network combining shared second-order vibration kernels, a 4×4 MIMO coupling module, an adaptive physical correction branch, and a Mamba-based temporal branch to estimate the 1st--40th-order wheel roughness spectrum from axle-box vibrations. It reports competitive prediction accuracy and relatively stable cross-wheel performance on three real-world datasets (strongest on Dataset III), along with noise robustness benefits from the Mamba branch.
Significance. If the results hold under rigorous validation, the work demonstrates the value of embedding modal-response priors via second-order operators in a gray-box model for vibration-based regression tasks in rail monitoring. This could improve generalization to unseen wheels and operational conditions, offering a practical advance over purely data-driven or black-box approaches for continuous roughness estimation.
major comments (2)
- [Experimental section] The claim of 'relatively stable cross-wheel performance' and advantage on Dataset III depends on the data partitioning protocol. The manuscript does not detail whether the splits are strictly leave-one-wheel-out (no wheel in both train/test) or allow mixed wheels, which could introduce leakage into the Mamba branch or correction module. This undermines verification that the physics priors (shared kernels and adaptive branch) drive the generalization rather than wheel-specific features.
- [Methods section] Insufficient details are provided on the implementation and enforcement of the physics priors, such as the exact form of the shared second-order vibration kernels and how the adaptive physical correction branch is constrained to remain physically meaningful rather than becoming a fully data-driven residual.
minor comments (2)
- [Abstract] The abstract mentions 'competitive prediction accuracy' without providing specific quantitative metrics, error bars, or comparisons to baselines, making it difficult to assess the magnitude of improvement.
- [Abstract] The phrase 'under the current data protocol' is vague and should be clarified or referenced to a specific section describing the protocol.
Simulated Author's Rebuttal
We thank the referee for the constructive and insightful comments, which highlight important aspects of clarity in our experimental protocol and methods description. We agree that both points require additional detail to strengthen the manuscript and will revise accordingly. Below we address each major comment point by point.
read point-by-point responses
-
Referee: [Experimental section] The claim of 'relatively stable cross-wheel performance' and advantage on Dataset III depends on the data partitioning protocol. The manuscript does not detail whether the splits are strictly leave-one-wheel-out (no wheel in both train/test) or allow mixed wheels, which could introduce leakage into the Mamba branch or correction module. This undermines verification that the physics priors (shared kernels and adaptive branch) drive the generalization rather than wheel-specific features.
Authors: We acknowledge that the current manuscript does not provide sufficient detail on the data partitioning protocol, which is a valid concern for assessing generalization. The experiments were performed under the protocol described in the datasets section (with the explicit qualifier 'under the current data protocol' in the abstract and results), but we did not explicitly state whether wheels are strictly separated between train and test sets. In the revision we will add a dedicated subsection clarifying the exact splitting strategy (including the degree of wheel overlap, if any), the rationale for the chosen protocol, and any measures taken to mitigate leakage. This will allow readers to evaluate whether the observed cross-wheel stability is attributable to the physics priors or to data leakage. revision: yes
-
Referee: [Methods section] Insufficient details are provided on the implementation and enforcement of the physics priors, such as the exact form of the shared second-order vibration kernels and how the adaptive physical correction branch is constrained to remain physically meaningful rather than becoming a fully data-driven residual.
Authors: We agree that the manuscript would benefit from more explicit implementation details on the physics priors. In the revised Methods section we will expand the description of the shared second-order vibration kernels by providing their precise mathematical formulation (including the second-order differential operator, shared parameter structure across the MIMO channels, and initialization/regularization strategy). For the adaptive physical correction branch we will add the exact architectural constraints, any auxiliary loss terms or projection operations used to enforce physical consistency, and the mechanism preventing it from collapsing into an unconstrained residual. These additions will make the gray-box nature of the model fully reproducible and verifiable. revision: yes
Circularity Check
No significant circularity; derivation remains self-contained
full rationale
The paper introduces PD-SOVNet as a hybrid architecture embedding modal-response priors via shared second-order vibration kernels, a 4x4 MIMO coupling module, an adaptive physical correction branch, and a Mamba temporal branch. These components are described as combining physics-guided structure with data-driven flexibility for sample-dependent correction. Experimental claims rest on performance metrics across three real-world datasets under a stated cross-wheel protocol, without any equations or steps that reduce the output roughness spectrum estimate to a direct algebraic rearrangement of the input vibration signals or to parameters fitted solely from the target labels. No self-citations are invoked as load-bearing uniqueness theorems, and no ansatz is smuggled in via prior author work. The framework is therefore not equivalent to its inputs by construction.
Axiom & Free-Parameter Ledger
free parameters (1)
- roughness order range
axioms (1)
- domain assumption Modal-response priors can be usefully embedded into shared second-order vibration kernels for axle-box signals
invented entities (2)
-
shared second-order vibration kernels
no independent evidence
-
adaptive physical correction branch
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel (J uniqueness) unclearShared SOS Kernels... second-order modal response kernels... Hm(s) = Km ωn,m² / (s² + 2ζm ωn,m s + ωn,m²) ... mapped ... to the order domain
-
IndisputableMonolith/Foundation/AbsoluteFloorClosure.leanreality_from_one_distinction unclearphysics-guided gray-box framework ... shared second-order vibration kernels ... adaptive physical correction branch
Reference graph
Works this paper leans on
-
[1]
J. C. Nielsen, A. Johansson, Out-of-round railway wheels-a literature survey, Proceedings of the Institution of Mechanical Engineers, Part F: Journal of Rail and Rapid Transit 214 (2) (2000) 79–91
2000
-
[2]
G. Tao, Z. Wen, X. Jin, X. Yang, Polygonisation of railway wheels: a critical review, Railway engineering science 28 (4) (2020) 317–345
2020
-
[3]
Alemi, F
A. Alemi, F. Corman, G. Lodewijks, Condition monitoring approaches for the detection of railway wheel defects, Proceedings of the Institution of Mechanical Engineers, Part F: Journal of Rail and Rapid Transit 231 (8) (2017) 961–981
2017
-
[4]
Y. Song, L. Liang, Y. Du, B. Sun, Railway polygonized wheel detection based on numerical time-frequency analysis of axle-box acceleration, Ap- plied Sciences 10 (5) (2020) 1613. 57
2020
-
[5]
Q. Sun, C. Chen, A. H. Kemp, P. Brooks, An on-board detection frame- workforpolygonwearofrailwaywheelbasedonvibrationaccelerationof axle-box, Mechanical Systems and Signal Processing 153 (2021) 107540
2021
-
[6]
S. Chen, K. Wang, Z. Zhou, Y. Yang, Z. Chen, W. Zhai, Quantita- tive detection of locomotive wheel polygonization under non-stationary conditions by adaptive chirp mode decomposition, Railway Engineering Science 30 (2) (2022) 129–147
2022
-
[7]
Y. Ye, B. Zhu, P. Huang, B. Peng, Oornet: A deep learning model for on-board condition monitoring and fault diagnosis of out-of-round wheels of high-speed trains, Measurement 199 (2022) 111268
2022
-
[8]
M. Dong, S. Chen, B. Xie, K. Wang, W. Zhai, A quantitative detection method for wheel polygonization of heavy-haul locomotives based on a hybrid deep learning model, Measurement 227 (2024) 114206
2024
-
[9]
W. Sun, X. Geng, D. J. Thompson, T. Wang, J. Zhou, J. Zhang, On- board identification of wheel polygonization of metro trains based on convolutional neural network regression analysis and angular-domain synchronous averaging, Mechanical Systems and Signal Processing 230 (2025) 112587
2025
-
[10]
D. Li, Y. Ye, F. Li, Q. Wang, Z. Tao, L. Wei, H. Shi, S. Qu, H. Dai, A model-based method for wheel out-of-roundness detection consider- ing rail flexibility and multi-wheel interaction, Mechanical Systems and Signal Processing 233 (2025) 112745
2025
-
[11]
G. E. Karniadakis, I. G. Kevrekidis, L. Lu, P. Perdikaris, S. Wang, L. Yang, Physics-informed machine learning, Nature Reviews Physics 3 (6) (2021) 422–440
2021
-
[12]
S.Cuomo, V.S.DiCola, F.Giampaolo, G.Rozza, M.Raissi, F.Piccialli, Scientific machine learning through physics–informed neural networks: Where we are and what’s next, Journal of Scientific Computing 92 (3) (2022) 88
2022
-
[13]
Raissi, P
M. Raissi, P. Perdikaris, G. E. Karniadakis, Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations, Journal of Computational physics 378 (2019) 686–707. 58
2019
-
[14]
L. Lu, P. Jin, G. Pang, Z. Zhang, G. E. Karniadakis, Learning nonlinear operators via deeponet based on the universal approximation theorem of operators, Nature machine intelligence 3 (3) (2021) 218–229
2021
-
[15]
Z. Li, N. Kovachki, K. Azizzadenesheli, B. Liu, K. Bhattacharya, A. Stu- art, A. Anandkumar, Fourier neural operator for parametric partial dif- ferential equations, arXiv preprint arXiv:2010.08895 (2020)
work page internal anchor Pith review arXiv 2010
-
[16]
S. Wang, H. Wang, P. Perdikaris, Learning the solution operator of para- metric partial differential equations with physics-informed deeponets, Science advances 7 (40) (2021) eabi8605
2021
-
[17]
Z. Li, H. Zheng, N. Kovachki, D. Jin, H. Chen, B. Liu, K. Azizzade- nesheli, A. Anandkumar, Physics-informed neural operator for learning partial differential equations, ACM/IMS Journal of Data Science 1 (3) (2024) 1–27
2024
-
[18]
Iwnicki, J
S. Iwnicki, J. C. Nielsen, G. Tao, Out-of-round railway wheels and poly- gonisation, Vehicle system dynamics 61 (7) (2023) 1787–1830
2023
-
[19]
Q. Wang, Z. Xiao, J. Zhou, D. Gong, Z. Zhang, Z. Wang, T. Wang, Y. He, A dynamic detection method for polygonal wear of railway wheel based on parametric power spectral estimation, Vehicle System Dynam- ics 61 (9) (2023) 2352–2374
2023
-
[20]
Guedes, R
A. Guedes, R. Silva, D. Ribeiro, C. Vale, A. Mosleh, P. Montenegro, A. Meixedo, Detection of wheel polygonization based on wayside moni- toring and artificial intelligence, Sensors 23 (4) (2023) 2188
2023
-
[21]
Magalhães, T
J. Magalhães, T. Jorge, R. Silva, A. Guedes, D. Ribeiro, A. Meixedo, A. Mosleh, C. Vale, P. Montenegro, A. Cury, A strategy for out-of- roundness damage wheels identification in railway vehicles based on sparse autoencoders, Railway Engineering Science 32 (4) (2024) 421– 443
2024
-
[22]
Jiang, G
J. Jiang, G. Tao, H. Liang, K. Zhang, Q. Xie, C. Lu, Z. Wen, Q. Xiao, A structure information-assisted generalization network for fault diagnosis of out-of-round wheels of metro trains, Measurement 244 (2025) 116519. 59
2025
- [23]
-
[24]
Kontolati, S
K. Kontolati, S. Goswami, G. Em Karniadakis, M. D. Shields, Learning nonlinear operators in latent spaces for real-time predictions of complex dynamics in physical systems, Nature Communications 15 (1) (2024) 5101
2024
-
[25]
M. Yin, N. Charon, R. Brody, L. Lu, N. Trayanova, M. Maggioni, A scal- able framework for learning the geometry-dependent solution operators of partial differential equations, Nature computational science 4 (12) (2024) 928–940
2024
-
[26]
Y. Wang, J. Sun, J. Bai, C. Anitescu, M. S. Eshaghi, X. Zhuang, T. Rabczuk, Y. Liu, Kolmogorov–arnold-informed neural network: A physics-informed deep learning framework for solving forward and in- verse problems based on kolmogorov–arnold networks, Computer Meth- ods in Applied Mechanics and Engineering 433 (2025) 117518
2025
- [27]
-
[28]
T. Ye, L. Dong, Y. Xia, Y. Sun, Y. Zhu, G. Huang, F. Wei, Differential transformer, in: The Thirteenth International Conference on Learning Representations, 2025. URLhttps://openreview.net/forum?id=OvoCm1gGhN
2025
-
[29]
W. Xu, Z. Wen, G. Tao, X. Wu, C. Yang, Y. Xie, W. Cai, J. Liu, M.Chi, S.Liang, Aphysics-guidedneuralnetworkwithembeddedmulti- wheel frf for robust wheel polygonal wear diagnosis, Measurement (2026) 120847
2026
-
[30]
B. Lu, C. Mou, G. Lin, ipinner: An iterative physics-informed neural network with ensemble kalman filter, Journal of Computational Physics (2025) 114592
2025
-
[31]
Peeters, G
B. Peeters, G. De Roeck, Stochastic system identification for operational modal analysis: a review, Journal of Dynamic Systems, Measurement, and Control 123 (4) (2001) 659–667. 60
2001
-
[32]
W. Sun, X. Geng, D. J. Thompson, T. Wang, J. Zhou, J. Zhang, On-board identification of wheel polygonization of metro trains based on convolutional neural network regression analysis and angular-domain synchronous averaging, Mechanical Systems and Signal Processing 230 (2025) 112587. doi:https://doi.org/10.1016/j.ymssp.2025.112587. URLhttps://www.scienced...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.