Recognition: 2 theorem links
· Lean TheoremRadarCNN: Learning-based Indoor Object Classification from IQ Imaging Radar Data
Pith reviewed 2026-05-10 18:17 UTC · model grok-4.3
The pith
A neural network classifies small indoor objects from raw mmWave radar IQ samples at 97-99 percent accuracy.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
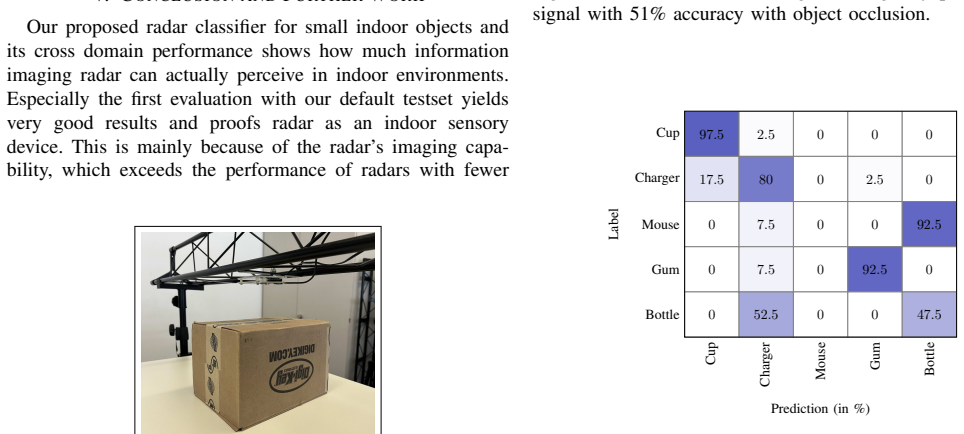
We introduce a machine learning-based mmWave MIMO FMCW imaging radar object classifier designed to identify small, hand-sized objects in indoor settings, utilizing only radar IQ samples as input. This system achieves 97-99 % accuracy on our test set and maintains approximately 50 % accuracy even under challenging conditions, such as increased background noise and occlusion of sample objects, without the need for adjusting training or pre-processing.
What carries the argument
RadarCNN, a convolutional neural network trained directly on raw radar IQ samples to perform object classification.
If this is right
- Radar can serve as a standalone sensor for indoor object recognition without first forming images or range-Doppler maps.
- Classification remains usable even when multipath and noise levels rise beyond those seen in training.
- The same pipeline supports through-the-wall or low-reflectivity object detection without extra processing stages.
- Future indoor perception systems could combine this radar-only path with cameras or LiDAR to cover edge cases.
Where Pith is reading between the lines
- Expanding the training set across more rooms and object types would likely raise the floor accuracy observed under heavy perturbation.
- The approach could be tested on moving or multiple objects to check whether the static-scene performance carries over to dynamic scenes.
- Because radar penetrates thin materials, the classifier may already handle partial occlusions better than vision-based methods in cluttered spaces.
Load-bearing premise
The collected indoor radar dataset and test conditions sufficiently represent real-world variations in multipath, noise, and object placement.
What would settle it
Collect fresh radar IQ data in an unseen room containing different objects and furniture, then measure whether clean-test accuracy falls below 90 percent or perturbed accuracy falls below 40 percent.
Figures






read the original abstract
Radar sensors operating in the mmWave frequency range face challenges when used as indoor perception and imaging devices, primarily due to noise and multipath signal distortions. These distortions often impair the sensors' ability to accurately perceive and image the indoor environment. Nevertheless, this sensor offers distinct advantages over camera and LiDAR sensors. This encompasses the estimation of object reflectivity, known as radar cross-section (RCS), and the ability to penetrate through objects that are thin or have low reflectivity. This results in a 'through-the-wall' sensing capability. Due to the aforementioned disadvantages, most research in the field of imaging radar tends to exclude indoor areas. We introduce a machine learning-based mmWave MIMO FMCW imaging radar object classifier designed to identify small, hand-sized objects in indoor settings, utilizing only radar IQ samples as input. This system achieves 97-99 % accuracy on our test set and maintains approximately 50 % accuracy even under challenging conditions, such as increased background noise and occlusion of sample objects, without the need for adjusting training or pre-processing. This demonstrates the robustness of our approach and offers insights into what needs to be improved in the future to achieve generalization and very high accuracy even in the presence of significant indoor perturbations.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces RadarCNN, a CNN classifier that takes raw IQ samples from a mmWave MIMO FMCW imaging radar as input and identifies small hand-sized objects in indoor scenes. It reports 97-99% accuracy on a held-out test set and approximately 50% accuracy when the same model is evaluated under increased background noise and object occlusion, without any retraining or preprocessing changes.
Significance. If the empirical claims are supported by properly documented experiments, the work would demonstrate that raw radar IQ data can support object classification in multipath-rich indoor environments where optical sensors struggle. The direct use of IQ samples rather than reconstructed images is a practical strength, and the reported robustness to noise/occlusion without retraining would be a useful data point for radar perception pipelines.
major comments (2)
- [Abstract] Abstract: The headline performance figures (97-99% test accuracy, ~50% under noise/occlusion) are stated without any accompanying information on the number of object classes, total dataset size, train/validation/test split ratios, or statistical measures such as error bars or significance tests. This absence makes the central empirical claim unverifiable from the provided text.
- [Abstract] Abstract: The description of 'challenging conditions' does not specify whether the increased-noise and occlusion trials were performed on data collected in entirely new rooms or layouts, or whether they were synthetic perturbations applied to the original collection environment. This distinction is load-bearing for the generalization claim, because environment-specific multipath signatures could account for the observed accuracies if all data share the same indoor layout.
minor comments (1)
- [Abstract] The abstract and introduction would benefit from a brief statement of the number of classes and the physical size of the objects to give readers immediate context for the reported accuracies.
Simulated Author's Rebuttal
We thank the referee for their constructive feedback on the manuscript. The comments highlight important aspects of clarity in the abstract, and we have prepared revisions to address them directly. Our point-by-point responses follow.
read point-by-point responses
-
Referee: [Abstract] Abstract: The headline performance figures (97-99% test accuracy, ~50% under noise/occlusion) are stated without any accompanying information on the number of object classes, total dataset size, train/validation/test split ratios, or statistical measures such as error bars or significance tests. This absence makes the central empirical claim unverifiable from the provided text.
Authors: We agree that the abstract as currently drafted does not contain these details and is therefore not self-contained for verification of the central claims. The experimental sections of the manuscript already document the dataset composition, split ratios, and statistical measures (including standard deviations across runs). To resolve this, we will revise the abstract to concisely incorporate a summary of the number of object classes, total dataset size, train/validation/test split ratios, and error bars. This change will make the performance figures verifiable directly from the abstract without altering the reported results. revision: yes
-
Referee: [Abstract] Abstract: The description of 'challenging conditions' does not specify whether the increased-noise and occlusion trials were performed on data collected in entirely new rooms or layouts, or whether they were synthetic perturbations applied to the original collection environment. This distinction is load-bearing for the generalization claim, because environment-specific multipath signatures could account for the observed accuracies if all data share the same indoor layout.
Authors: We acknowledge the importance of this distinction for interpreting the robustness results. The increased-noise and occlusion conditions were generated by applying synthetic perturbations directly to the original held-out test data collected in the same indoor environment; no new rooms or layouts were used. We will revise the abstract and add a clarifying sentence in the experimental discussion to state this explicitly. This approach evaluates robustness to perturbations within the training distribution but does not claim cross-environment generalization, consistent with the manuscript's note on future work needed for full generalization. revision: yes
Circularity Check
No circularity: standard supervised ML evaluation on held-out data
full rationale
The paper describes training a CNN on radar IQ samples to classify hand-sized objects and reports empirical accuracies (97-99 % on test set, ~50 % under added noise/occlusion) without retraining. These are direct measurements on partitioned data rather than any derived quantity obtained by fitting a parameter and then relabeling the fit as a prediction. No equations appear that equate an output to an input by construction, no uniqueness theorems are invoked, and no self-citations are used to justify core modeling choices. The pipeline is a conventional supervised-learning experiment whose central claims remain falsifiable by new environments or objects.
Axiom & Free-Parameter Ledger
free parameters (1)
- CNN architecture and training hyperparameters
axioms (2)
- domain assumption Raw IQ samples contain sufficient class-discriminative information for small-object classification despite indoor multipath and noise
- domain assumption The test set distribution matches the training distribution closely enough for the reported accuracy to be meaningful
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclearWe introduce a machine learning-based mmWave MIMO FMCW imaging radar object classifier ... utilizing only radar IQ samples as input. This system achieves 97-99 % accuracy...
-
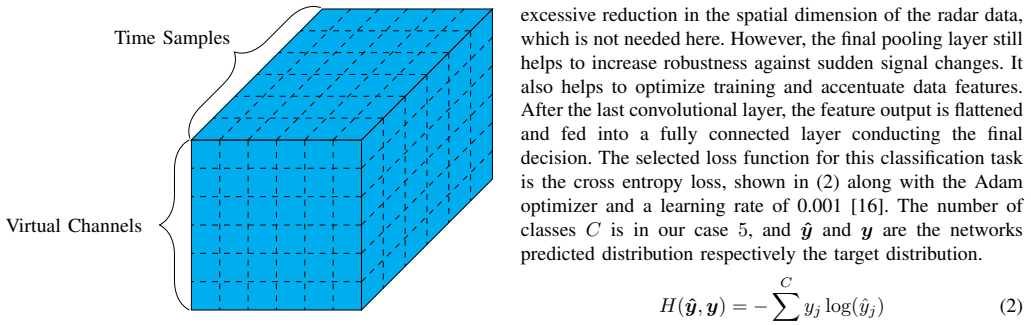
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclearThe neural network itself consists of three different 2D convolutional layers ... cross entropy loss ... Adam optimizer
Reference graph
Works this paper leans on
-
[1]
Robust Depth Estimation in Foggy Environments Combining RGB Images and mmWave Radar
Xiong, Mengchen and Xu, Xiao and Yang, Dong and Steinbach, Eckehard, “Robust Depth Estimation in Foggy Environments Combining RGB Images and mmWave Radar”, 2022 IEEE International Symposium on Multimedia (ISM), 2022
2022
-
[2]
Y . Liu, S. Chang, Z. Wei, K. Zhang and Z. Feng, ”Fusing mmWave Radar With Camera for 3-D Detection in Autonomous Driving,” in IEEE Internet of Things Journal, vol. 9, no. 20, pp. 20408-20421, 15 Oct.15, 2022
2022
-
[3]
N. S. Zewge, Y . Kim, J. Kim and J. -H. Kim, ”Millimeter-Wave Radar and RGB-D Camera Sensor Fusion for Real-Time People Detection and Tracking,” 2019 7th International Conference on Robot Intelligence Technology and Applications (RiTA), Daejeon, Korea (South), 2019, pp. 93-98
2019
-
[4]
I. Bilik, ”Comparative Analysis of Radar and Lidar Technologies for Automotive Applications,” in IEEE Intelligent Transportation Sys- tems Magazine, vol. 15, no. 1, pp. 244-269, Jan.-Feb. 2023, doi: 10.1109/MITS.2022.3162886
-
[5]
S. Yao et al., ”Radar-Camera Fusion for Object Detection and Semantic Segmentation in Autonomous Driving: A Comprehen- sive Review,” in IEEE Transactions on Intelligent Vehicles, doi: 10.1109/TIV .2023.3307157
work page doi:10.1109/tiv 2023
-
[6]
D. Lee, C. Cheung and D. Pritsker, ”Radar-based Object Classification Using An Artificial Neural Network,” 2019 IEEE National Aerospace and Electronics Conference (NAECON), Dayton, OH, USA, 2019, pp. 305-310
2019
-
[7]
Ulrich, C
M. Ulrich, C. Gl ¨aser and F. Timm, ”DeepReflecs: Deep Learning for Automotive Object Classification with Radar Reflections,” 2021 IEEE Radar Conference (RadarConf21), Atlanta, GA, USA, 2021, pp. 1-6
2021
-
[8]
K. Patel, W. Beluch, K. Rambach, M. Pfeiffer and B. Yang, ”Improving Uncertainty of Deep Learning-based Object Classification on Radar Spectra using Label Smoothing,” 2022 IEEE Radar Conference (Radar- Conf22), New York City, NY , USA, 2022, pp. 1-6, doi: 10.1109/Radar- Conf2248738.2022.9764233
-
[9]
L. Senigagliesi, G. Ciattaglia, D. Disha and E. Gambi, ”Classification of Human Activities based on Automotive Radar Spectral Images Using Machine Learning Techniques: A Case Study,” 2022 IEEE Radar Conference (RadarConf22), New York City, NY , USA, 2022, pp. 1-6, doi: 10.1109/RadarConf2248738.2022.9764217
-
[10]
R. Xu, W. Dong, A. Sharma and M. Kaess, ”Learned Depth Estimation of 3D Imaging Radar for Indoor Mapping,” 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 2022, pp. 13260-13267
2022
-
[11]
Dogru and L
S. Dogru and L. Marques, ”Grid Based Indoor Mapping Using Radar,” 2019 Third IEEE International Conference on Robotic Computing (IRC), Naples, Italy, 2019, pp. 451-452
2019
-
[12]
Montgomery, G
D. Montgomery, G. Holm ´en, P. Almers and A. Jakobsson, ”Surface Classification with Millimeter-Wave Radar Using Temporal Features and Machine Learning,” 2019 16th European Radar Conference (EuRAD), Paris, France, 2019, pp. 1-4
2019
-
[13]
R. N. Khushaba and A. J. Hill, ”Radar-Based Materials Classification Using Deep Wavelet Scattering Transform: A Comparison of Centimeter vs. Millimeter Wave Units,” in IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 2016-2022, April 2022
2016
-
[14]
IMAGEVK-74 4D Imaging Radar, Mini-Circuits and Vayyar, https:// www.minicircuits.com/WebStore/imagevk 74.html
-
[15]
MMWCAS-RF-EVM mmWave Cascade Imaging Radar, Texas Instru- ments, https://www.ti.com/tool/MMWCAS-RF-EVM
-
[16]
Adam: A Method for Stochastic Optimization
Diederik P. Kingma and Jimmy Ba, ”Adam: A Method for Stochastic Optimization” in 3rd International Conference for Learning Represen- tations, San Diego, https://arxiv.org/abs/1412.6980, 2015
work page internal anchor Pith review Pith/arXiv arXiv 2015
-
[17]
Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift
S. Ioffe and C. Szegedyl, ”Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift”, in CoRR, abs/1502.03167, http://arxiv.org/abs/1502.03167, 2015
work page internal anchor Pith review arXiv 2015
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.