RieIF: Knowledge-Driven Riemannian Information Flow for Robust Spatio-Temporal Graph Signal Prediction in 6G Wireless Networks
Pith reviewed 2026-05-10 17:48 UTC · model grok-4.3
The pith
Projecting wireless graph signals onto a unit hypersphere with knowledge graph guidance enables robust prediction despite contiguous missing measurements.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
RieIF is a geometry-consistent framework that incorporates knowledge graphs for robust spatio-temporal graph signal prediction. For analytical tractability within the Fisher-Rao geometry, inputs are projected from a Riemannian manifold onto a positive unit hypersphere where angular similarity is computationally efficient. This projection occurs via a graph transformer that uses the knowledge graph as a structural prior to constrain attention and generate a micro stream. An LSTM model captures temporal dynamics to produce a macro stream. The micro stream highlighting geometric shape and the macro stream emphasizing signal strength are then adaptively fused through a geometric gating mechanism
What carries the argument
RieIF framework that projects inputs onto a positive unit hypersphere for efficient angular similarity, constrained by knowledge-graph attention in a graph transformer to form a micro stream, combined with LSTM temporal modeling for a macro stream and geometric gating for fusion
If this is right
- Prediction error decreases consistently when entire groups of correlated measurements are absent over contiguous time intervals.
- Root mean squared error can be lowered by as much as 31 percent relative to baselines that lack the Riemannian projection or knowledge-graph prior.
- Recovery signal-to-noise ratio can improve by up to 3.2 dB under the same blind-spot conditions.
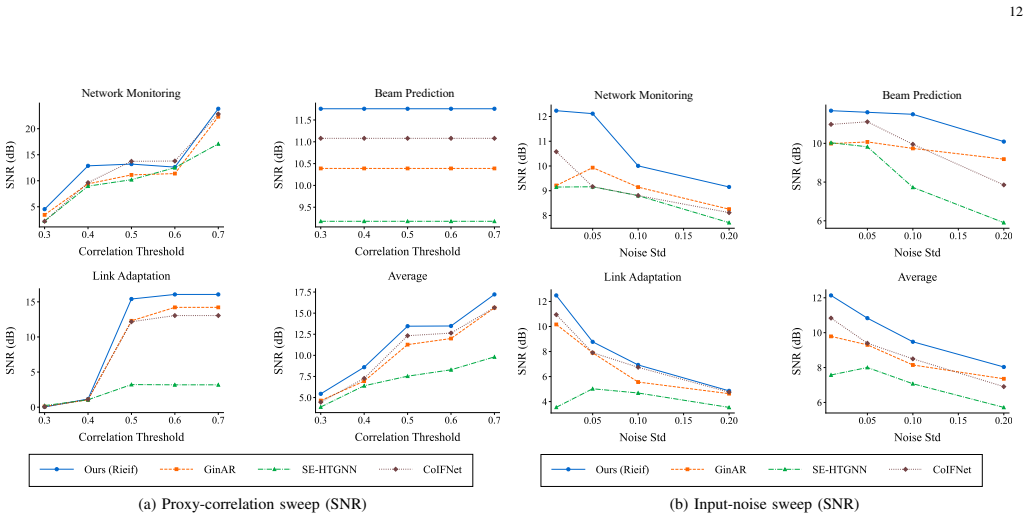
- Performance remains stable when the underlying graph becomes sparser or when additive measurement noise increases.
Where Pith is reading between the lines
- The same hypersphere projection and knowledge-graph attention pattern could be tested on other domains that produce incomplete spatio-temporal graphs, such as traffic flow or environmental sensor networks.
- Replacing the LSTM macro stream with a more recent temporal architecture might further reduce latency in real-time 6G control loops without altering the geometric fusion step.
- The framework's emphasis on angular rather than Euclidean distances suggests it may also improve robustness in other signal-processing tasks where phase or directional relationships dominate over absolute magnitudes.
Load-bearing premise
Projecting inputs from a Riemannian manifold onto a positive unit hypersphere preserves the information needed for accurate prediction while the knowledge graph supplies a reliable structural prior for attention.
What would settle it
Running RieIF on additional wireless datasets where the supplied knowledge graph fails to capture true variable correlations or where the hypersphere projection visibly distorts amplitude information, and observing whether the reported RMSE and SNR gains over standard graph transformers disappear.
Figures





read the original abstract
With 6G evolving towards intelligent network autonomy, artificial intelligence (AI)-native operations are becoming pivotal. Wireless networks continuously generate rich and heterogeneous data, which inherently exhibits spatio-temporal graph structure. However, limited radio resources result in incomplete and noisy network measurements. This challenge is further intensified when a target variable and its strongest correlates are missing over contiguous intervals, forming systemic blind spots. To tackle this issue, we propose RieIF (Knowledge-driven Riemannian Information Flow), a geometry-consistent framework that incorporates knowledge graphs (KGs) for robust spatio-temporal graph signal prediction. For analytical tractability within the Fisher-Rao geometry, we project the input from a Riemannian manifold onto a positive unit hypersphere, where angular similarity is computationally efficient. This projection is implemented via a graph transformer, using the KG as a structural prior to constrain attention and generate a micro stream. Simultaneously, a Long Short-Term Memory (LSTM) model captures temporal dynamics to produce a macro stream. Finally, the micro stream (highlighting geometric shape) and the macro stream (emphasizing signal strength) are adaptively fused through a geometric gating mechanism for signal recovery. Experiments on three wireless datasets show consistent improvements under systemic blind spots, including up to 31% reduction in root mean squared error and up to 3.2 dB gain in recovery signal-to-noise ratio, while maintaining robustness to graph sparsity and measurement noise.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes RieIF, a geometry-consistent framework for robust spatio-temporal graph signal prediction in 6G networks under systemic blind spots. Inputs from a Riemannian manifold are projected onto a positive unit hypersphere to enable efficient angular similarity; a KG-constrained graph transformer produces a micro-stream, an LSTM produces a macro-stream capturing temporal dynamics, and the streams are fused via adaptive geometric gating. Experiments on three wireless datasets report up to 31% RMSE reduction and 3.2 dB SNR gain while remaining robust to sparsity and noise.
Significance. If validated, the hybrid Riemannian-KG-LSTM design could advance AI-native 6G operations by offering a principled way to recover signals when both a target and its correlates are missing over contiguous intervals. The explicit use of Fisher-Rao geometry to motivate the hypersphere projection and the KG as an attention prior are distinctive; the reported gains under challenging missing-data regimes would be practically relevant if they can be attributed to these components rather than to the LSTM or generic transformer elements alone.
major comments (3)
- [Abstract and §4] Abstract and §4 (Experiments): the stated 31% RMSE reduction and 3.2 dB SNR gains are presented without naming the baselines, reporting error bars, or providing statistical tests; this is load-bearing because the central claim attributes the improvements to the Riemannian projection and KG-constrained attention, yet the reader cannot determine whether gains exceed those of a plain LSTM or unconstrained graph transformer.
- [§3.2] §3.2 (Projection onto positive unit hypersphere): the claim that the Fisher-Rao-motivated mapping preserves the spatio-temporal correlations required for blind-spot recovery is not accompanied by an analysis or ablation showing that magnitude-sensitive information discarded by the unit-norm constraint is recoverable by the LSTM macro-stream; if the projection distorts distances that the micro-stream relies upon, the reported gains cannot be credited to the geometry-consistent design.
- [§3.3 and §4.3] §3.3 (KG-constrained attention) and §4.3 (Ablations): the structural prior supplied by the knowledge graph is load-bearing for the micro-stream, yet no comparison is shown against an unconstrained graph transformer or against a generic graph prior; without this, it remains possible that the attention constraint adds little beyond standard regularization and that performance stems primarily from the LSTM and gating.
minor comments (2)
- [§2 and §3] Notation in §2 and §3: define the positive unit hypersphere and the exact form of the geometric gating weights explicitly, including any free parameters.
- [§4] Figures in §4: include error bars on all bar plots and line plots, and label the exact baseline methods used for each metric.
Simulated Author's Rebuttal
We thank the referee for the constructive and insightful comments. We address each major point below with clarifications and indicate the revisions made to strengthen the attribution of gains to the Riemannian projection and KG prior. All requested experimental enhancements have been incorporated.
read point-by-point responses
-
Referee: [Abstract and §4] Abstract and §4 (Experiments): the stated 31% RMSE reduction and 3.2 dB SNR gains are presented without naming the baselines, reporting error bars, or providing statistical tests; this is load-bearing because the central claim attributes the improvements to the Riemannian projection and KG-constrained attention, yet the reader cannot determine whether gains exceed those of a plain LSTM or unconstrained graph transformer.
Authors: We agree that the original presentation would benefit from explicit baseline identification, error bars, and statistical tests. In the revised manuscript, the abstract and §4 now name all baselines (plain LSTM, unconstrained graph transformer, and additional controls), report mean and standard deviation over 10 runs, and include paired t-test results (p < 0.01) confirming that RieIF improvements are statistically significant over the LSTM and generic transformer. These additions demonstrate that the reported gains exceed those attributable to the LSTM or unconstrained transformer components alone. revision: yes
-
Referee: [§3.2] §3.2 (Projection onto positive unit hypersphere): the claim that the Fisher-Rao-motivated mapping preserves the spatio-temporal correlations required for blind-spot recovery is not accompanied by an analysis or ablation showing that magnitude-sensitive information discarded by the unit-norm constraint is recoverable by the LSTM macro-stream; if the projection distorts distances that the micro-stream relies upon, the reported gains cannot be credited to the geometry-consistent design.
Authors: We acknowledge that the original §3.2 would be strengthened by explicit analysis of magnitude recovery. We have added a dedicated ablation in the revised §4.3 comparing the full model against (i) a no-projection variant using raw inputs and (ii) a variant without the LSTM macro-stream. Results show that angular focus from the hypersphere projection aids correlation recovery in blind spots while the LSTM recovers magnitude information, yielding net gains. A short theoretical paragraph on Fisher-Rao motivation for the projection under sparsity has also been included. revision: yes
-
Referee: [§3.3 and §4.3] §3.3 (KG-constrained attention) and §4.3 (Ablations): the structural prior supplied by the knowledge graph is load-bearing for the micro-stream, yet no comparison is shown against an unconstrained graph transformer or against a generic graph prior; without this, it remains possible that the attention constraint adds little beyond standard regularization and that performance stems primarily from the LSTM and gating.
Authors: We agree that isolating the KG prior requires direct comparisons. The revised §4.3 now includes ablations replacing KG-constrained attention with (i) standard unconstrained multi-head attention and (ii) attention constrained by a generic adjacency prior. Quantitative results indicate that the KG prior delivers additional RMSE and SNR improvements under systemic blind spots beyond those from the LSTM, gating, or generic regularization, confirming its load-bearing contribution to the micro-stream. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper describes a framework with Riemannian manifold projection to positive unit hypersphere for angular similarity, KG-constrained graph transformer micro-stream, LSTM macro-stream, and adaptive geometric gating fusion. No equations, self-citations, or derivation steps are provided in the abstract or context that reduce any claimed prediction or result to its inputs by construction. Design choices are motivated by Fisher-Rao geometry and domain knowledge graphs without evidence of fitted parameters renamed as predictions or load-bearing self-referential arguments. The experimental gains are presented as empirical outcomes rather than derived equivalences, making the chain self-contained.
Axiom & Free-Parameter Ledger
free parameters (1)
- geometric gating weights
axioms (1)
- domain assumption Projection of input data onto a positive unit hypersphere preserves essential Fisher-Rao geometric properties for efficient angular similarity computation.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel (J(x) = ½(x + x^{-1}) - 1 uniquely calibrated reciprocal cost on positive reals) echoes?
echoesECHOES: this paper passage has the same mathematical shape or conceptual pattern as the Recognition theorem, but is not a direct formal dependency.
we project the input from a Riemannian manifold onto a positive unit hypersphere, where angular similarity is computationally efficient... zi,t = hi,t / ||hi,t||2 ... dFR(pi,t, pj,t) = 2 arccos(z_i,t^T z_j,t) ... shape-scale disentanglement
-
IndisputableMonolith/Foundation/AlphaCoordinateFixation.leancostAlphaLog_high_calibrated_iff (higher-derivative calibration isolates J on positive domain) echoes?
echoesECHOES: this paper passage has the same mathematical shape or conceptual pattern as the Recognition theorem, but is not a direct formal dependency.
Energetic rectification (positivity-preserving map): Softplus... hi,t = Φnode(xi,t) ∈ M+ ⊆ R^D_+ ... retraction via Softplus
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Intelligence-endogenous networks: Innovative network paradigm for 6G,
F. Zhou, W. Li, Y . Yang, L. Feng, P. Yu, M. Zhao, X. Yan, and J. Wu, “Intelligence-endogenous networks: Innovative network paradigm for 6G,” IEEE Wireless Commun., vol. 29, no. 1, pp. 40–47, 2022
work page 2022
-
[2]
Toward 6G TKµ extreme connectivity: Architecture, key technologies and experiments,
X. You, Y . Huang, S. Liu, D. Wang, J. Ma, C. Zhang, et al., “Toward 6G TKµ extreme connectivity: Architecture, key technologies and experiments,”IEEE Wireless Commun., vol. 30, no. 3, pp. 86–95, 2023
work page 2023
-
[3]
AI empowered wireless communications: From bits to semantics,
Z. Qin, L. Liang, Z. Wang, S. Jin, X. Tao, W. Tong, and G. Y . Li, “AI empowered wireless communications: From bits to semantics,”Proc. IEEE, vol. 112, no. 7, pp. 621–652, 2024. 13
work page 2024
-
[4]
Digital twin-enhanced deep reinforcement learning for resource management in networks slicing,
Z. Zhang, Y . Huang, C. Zhang, Q. Zheng, L. Yang, and X. You, “Digital twin-enhanced deep reinforcement learning for resource management in networks slicing,”IEEE Trans. Commun., vol. 72, no. 10, pp. 6209–6224, 2024
work page 2024
-
[5]
Accurate recovery of missing network measurement data with localized tensor completion,
K. Xie, X. Wang, X. Wang, Y . Chen, G. Xie, Y . Ouyang, J. Wen, J. Cao, and D. Zhang, “Accurate recovery of missing network measurement data with localized tensor completion,”IEEE/ACM Trans. Netw., vol. 27, no. 6, pp. 2222–2235, 2019
work page 2019
-
[6]
R. Sun, N. Cheng, C. Li, W. Quan, H. Zhou, Y . Wang, W. Zhang, and X. Shen, “A comprehensive survey of knowledge-driven deep learning for intelligent wireless network optimization in 6G,”IEEE Commun. Surveys Tuts., 2025
work page 2025
-
[7]
Y . Huang, X. You, H. Zhan, S. He, N. Fu, and W. Xu, “Learning wireless data knowledge graph for green intelligent communications: Methodology and experiments,”IEEE Trans. Mobile Comput., vol. 23, no. 12, pp. 12 298–12 312, 2024
work page 2024
-
[8]
X. YOU, Y . HUANG, C. ZHANG, J. WANG, H. YIN, and H. WU, “When ai meets sustainable 6g,”Science China(Information Sciences), vol. 68, no. 01, pp. 4–22, 2025
work page 2025
-
[9]
A meta-learning based framework for cell-level mobile network traffic prediction,
F. Li, Z. Zhang, X. Chu, J. Zhang, S. Qiu, and J. Zhang, “A meta-learning based framework for cell-level mobile network traffic prediction,”IEEE Trans. Wireless Commun., vol. 22, no. 6, pp. 4264–4280, 2023
work page 2023
-
[10]
Intelligent interactive beam training for millimeter wave communications,
J. Zhang, Y . Huang, J. Wang, X. You, and C. Masouros, “Intelligent interactive beam training for millimeter wave communications,”IEEE Trans. Wireless Commun., vol. 20, no. 3, pp. 2034–2048, 2021
work page 2034
-
[11]
Deep learning assisted mmWave beam prediction with flexible network architecture,
P. Wang, K. Ma, Y . Bai, C. Sun, and Z. Wang, “Deep learning assisted mmWave beam prediction with flexible network architecture,”IEEE Trans. Wireless Commun., vol. 24, no. 11, pp. 9435–9448, 2025
work page 2025
-
[12]
S. Zhang, S. Zhang, Y . Mao, L. K. Yeung, B. Clerckx, and T. Q. S. Quek, “Transformer-based channel prediction for rate-splitting multiple access- enabled vehicle-to-everything communication,”IEEE Trans. Wireless Commun., vol. 23, no. 10, pp. 12 717–12 730, 2024
work page 2024
-
[13]
Beam domain channel modeling and prediction for UA V communications,
H. Chang, C.-X. Wang, R. Feng, C. Huang, L. Hou, and E.-H. M. Aggoune, “Beam domain channel modeling and prediction for UA V communications,”IEEE Trans. Wireless Commun., vol. 24, no. 2, pp. 969–983, 2025
work page 2025
-
[14]
F. Minani, M. Kobayashi, T. Fujihashi, M. A. Alim, S. Saruwatari, M. Nishi, and T. Watanabe, “Channel prediction and fair resource allocation for NTN uplinks by LSTM and deep reinforcement learning,” IEEE Trans. Wireless Commun., vol. 24, no. 10, pp. 8311–8330, 2025
work page 2025
-
[15]
Temporal regularized matrix factorization for high-dimensional time series prediction,
H.-F. Yu, N. Rao, and I. S. Dhillon, “Temporal regularized matrix factorization for high-dimensional time series prediction,” inAdv. Neural Inf. Process. Syst., vol. 29, 2016
work page 2016
-
[16]
A bayesian tensor decomposition approach for spatiotemporal traffic data imputation,
X. Chen, Z. He, and L. Sun, “A bayesian tensor decomposition approach for spatiotemporal traffic data imputation,”Transp. Res. Part C Emerg. Technol., vol. 98, pp. 73–84, 2019
work page 2019
-
[17]
Graph WaveNet for deep spatial-temporal graph modeling,
Z. Wu, S. Pan, G. Long, J. Jiang, and C. Zhang, “Graph WaveNet for deep spatial-temporal graph modeling,” inProc. 28th Int. Joint Conf. Artif. Intell. (IJCAI-19), 2019, pp. 1907–1913
work page 2019
-
[18]
Attention based spatial- temporal graph convolutional networks for traffic flow forecasting,
S. Guo, Y . Lin, N. Feng, C. Song, and H. Wan, “Attention based spatial- temporal graph convolutional networks for traffic flow forecasting,” in Proc. AAAI Conf. Artif. Intell., vol. 33, no. 1, 2019, pp. 922–929
work page 2019
-
[19]
Filling the G ap s: Multivariate time series imputation by graph neural networks,
A. Cini, I. Marisca, and C. Alippi, “Filling the G ap s: Multivariate time series imputation by graph neural networks,” inProc. Int. Conf. Learn. Represent. (ICLR), 2022
work page 2022
-
[20]
Learning to reconstruct missing data from spatiotemporal graphs with sparse observations,
I. Marisca, A. Cini, and C. Alippi, “Learning to reconstruct missing data from spatiotemporal graphs with sparse observations,” inAdv. Neural Inf. Process. Syst., vol. 35, 2022, pp. 32 069–32 082
work page 2022
-
[21]
CSDI: Conditional score- based diffusion models for probabilistic time series imputation,
Y . Tashiro, J. Song, Y . Song, and S. Ermon, “CSDI: Conditional score- based diffusion models for probabilistic time series imputation,” inAdv. Neural Inf. Process. Syst., vol. 34, 2021, pp. 24 804–24 816
work page 2021
-
[22]
GINAR: An end-to-end multivariate time series forecasting model suitable for variable missing,
C. Yu, F. Wang, Z. Shao, T. Qian, Z. Zhang, W. Wei, and Y . Xu, “GINAR: An end-to-end multivariate time series forecasting model suitable for variable missing,” inProc. 30th ACM SIGKDD Int. Conf. Knowl. Discov. Data Min. (KDD), 2024, pp. 3989–4000
work page 2024
-
[23]
CoIFNet: A unified framework for multivariate time series forecasting with missing values,
K. Tang, J. Zhang, H. Meng, M. Ma, Q. Xiong, F. Lv, J. Xu, and T. Li, “CoIFNet: A unified framework for multivariate time series forecasting with missing values,”arXiv preprint arXiv:2506.13064, 2025
-
[24]
Amari,Information Geometry and Its Applications
S.-i. Amari,Information Geometry and Its Applications. Springer, 2016
work page 2016
-
[25]
N. N. Cencov,Statistical Decision Rules and Optimal Inference. Amer. Math. Soc., 2000
work page 2000
-
[26]
T. Wang and P. Isola, “Understanding contrastive representation learning through alignment and uniformity on the hypersphere,” inProc. 37th Int. Conf. Mach. Learn. (ICML), 2020, pp. 9929–9939
work page 2020
-
[27]
Hyperbolic graph convo- lutional neural networks,
I. Chami, Z. Ying, C. R ´e, and J. Leskovec, “Hyperbolic graph convo- lutional neural networks,” inAdv. Neural Inf. Process. Syst., vol. 32, 2019
work page 2019
-
[28]
Ricci curvature of markov chains on metric spaces,
Y . Ollivier, “Ricci curvature of markov chains on metric spaces,”J. Funct. Anal., vol. 256, no. 3, pp. 810–864, 2009
work page 2009
-
[29]
NR and NG-RAN overall description; stage 2,
3GPP, “NR and NG-RAN overall description; stage 2,” 3rd Generation Partnership Project, Technical Specification TS 38.300, 2024, v18.4.0
work page 2024
-
[30]
NR; physical layer procedures for data,
——, “NR; physical layer procedures for data,” 3rd Generation Partner- ship Project, Technical Specification TS 38.214, 2024, v18.8.0
work page 2024
-
[31]
A. Vaswani, N. Shazeer, N. Parmar, J. Uszkoreit, L. Jones, A. N. Gomez, Ł. Kaiser, and I. Polosukhin, “Attention is all you need,” inAdv. Neural Inf. Process. Syst., vol. 30, 2017, pp. 5998–6008
work page 2017
-
[32]
P. Veli ˇckovi´c, G. Cucurull, A. Casanova, A. Romero, P. Li `o, and Y . Bengio, “Graph attention networks,” inProc. Int. Conf. Learn. Represent. (ICLR), 2018
work page 2018
-
[33]
Adam: A method for stochastic optimization,
D. P. Kingma and J. Ba, “Adam: A method for stochastic optimization,” inProc. Int. Conf. Learn. Represent. (ICLR), 2015
work page 2015
-
[34]
Simple and effi- cient heterogeneous temporal graph neural network,
Y . Wang, T. Huang, C. He, Q. Li, and J. Gao, “Simple and effi- cient heterogeneous temporal graph neural network,”arXiv preprint arXiv:2510.18467, 2025
-
[35]
de Boor,A Practical Guide to Splines
C. de Boor,A Practical Guide to Splines. Springer-Verlag, 1978
work page 1978
-
[36]
A new approach to linear filtering and prediction problems,
R. E. Kalman, “A new approach to linear filtering and prediction problems,”J. Basic Eng., vol. 82, no. 1, pp. 35–45, 1960
work page 1960
-
[37]
Spatio-temporal graph convolutional networks: A deep learning framework for traffic forecasting,
B. Yu, H. Yin, and Z. Zhu, “Spatio-temporal graph convolutional networks: A deep learning framework for traffic forecasting,” inProc. 27th Int. Joint Conf. Artif. Intell. (IJCAI-18), 2018, pp. 3634–3640
work page 2018
-
[38]
STG2Seq: Spatial-temporal graph to sequence model for multi-step passenger demand forecasting,
L. Bai, L. Yao, S. S. Kanhere, X. Wang, and Q. Z. Sheng, “STG2Seq: Spatial-temporal graph to sequence model for multi-step passenger demand forecasting,” inProc. 28th Int. Joint Conf. Artif. Intell. (IJCAI- 19), 2019, pp. 1981–1987
work page 2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.