Recognition: unknown
A Multi-head Attention Fusion Network for Industrial Prognostics under Discrete Operational Conditions
Pith reviewed 2026-05-10 15:53 UTC · model grok-4.3
The pith
A multi-head attention fusion network improves prognostics by integrating degradation trends, operating states, and noise.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
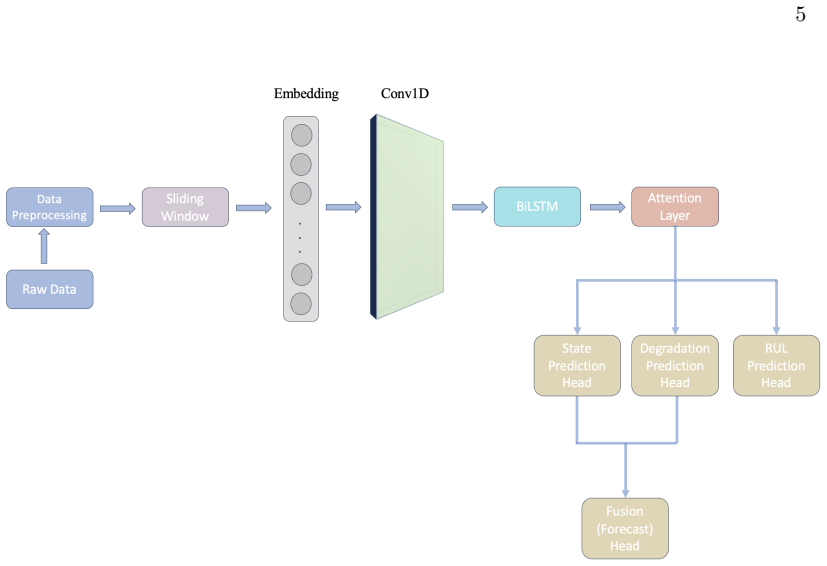
The proposed multi-head attention-based fusion neural network explicitly models and integrates the monotonic degradation trend, discrete operating states identified through clustering and encoded into dense embeddings, and residual random noise, using BiLSTM networks combined with attention mechanisms and a fusion module to adaptively weight temporal dependencies and capture interactions for more accurate prognostics under varying operational conditions.
What carries the argument
The fusion module that integrates degradation-trend BiLSTM outputs with operating-state embeddings via multi-head attention to model their interactions.
Load-bearing premise
The assumption that clustering sensor data can reliably identify discrete operating states and that their embeddings interact with the degradation trend in a way that boosts prediction performance over models without them.
What would settle it
If a standard BiLSTM model without clustering for operating states and without the fusion module achieves the same or better prediction accuracy on the validation dataset, the central claim would not hold.
Figures

read the original abstract
Complex systems such as aircraft engines, turbines, and industrial machinery often operate under dynamically changing conditions. These varying operating conditions can substantially influence degradation behavior and make prognostic modeling more challenging, as accurate prediction requires explicit consideration of operational effects. To address this issue, this paper proposes a novel multi-head attention-based fusion neural network. The proposed framework explicitly models and integrates three signal components: (1) the monotonic degradation trend, which reflects the underlying deterioration of the system; (2) discrete operating states, identified through clustering and encoded into dense embeddings; and (3) residual random noise, which captures unexplained variation in sensor measurements. The core strength of the framework lies in its architecture, which combines BiLSTM networks with attention mechanisms to better capture complex temporal dependencies. The attention mechanism allows the model to adaptively weight different time steps and sensor signals, improving its ability to extract prognostically relevant information. In addition, a fusion module is designed to integrate the outputs from the degradation-trend branch and the operating-state embeddings, enabling the model to capture their interactions more effectively. The proposed method is validated using a dataset from the NASA repository, and the results demonstrate its effectiveness.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a multi-head attention fusion network for industrial prognostics that explicitly decomposes sensor signals into a monotonic degradation trend (modeled via BiLSTM), discrete operating states (identified by unsupervised clustering and encoded as embeddings), and residual random noise. A fusion module integrates the trend and state embeddings via attention to capture their interactions, with validation claimed on NASA benchmark data.
Significance. If the empirical support and independence assumptions hold, the architecture offers a structured way to handle discrete operational regimes in prognostics, potentially improving robustness over standard sequence models by separating and fusing the three components.
major comments (2)
- [Abstract] Abstract: The central claim that 'the results demonstrate its effectiveness' on NASA data is unsupported, as no quantitative metrics (e.g., RMSE, accuracy), baseline comparisons, training details, or ablation studies are supplied in the visible description of the validation.
- [Method (clustering and embedding branch)] Method section on operating-state identification: Unsupervised clustering is applied directly to raw sensor readings to extract discrete operating states. Because sensor values are jointly determined by both health degradation and operating regime, this risks recovering degradation stages rather than independent operating conditions; without detrending, condition-specific feature selection, or post-hoc validation (e.g., correlation with known regime labels), the resulting embeddings are not guaranteed to be independent of the degradation-trend branch, so the fusion module cannot isolate operational effects as asserted.
minor comments (2)
- [Abstract / Method] The description of the three signal components is conceptually clear, but the precise mathematical formulation of the residual noise term and how it is separated from the other branches should be stated explicitly.
- [Method] Notation for the attention heads and fusion module could be standardized with equation numbers to improve readability.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address each major comment below and will revise the manuscript to strengthen the presentation of results and the methodological justification for the clustering approach.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim that 'the results demonstrate its effectiveness' on NASA data is unsupported, as no quantitative metrics (e.g., RMSE, accuracy), baseline comparisons, training details, or ablation studies are supplied in the visible description of the validation.
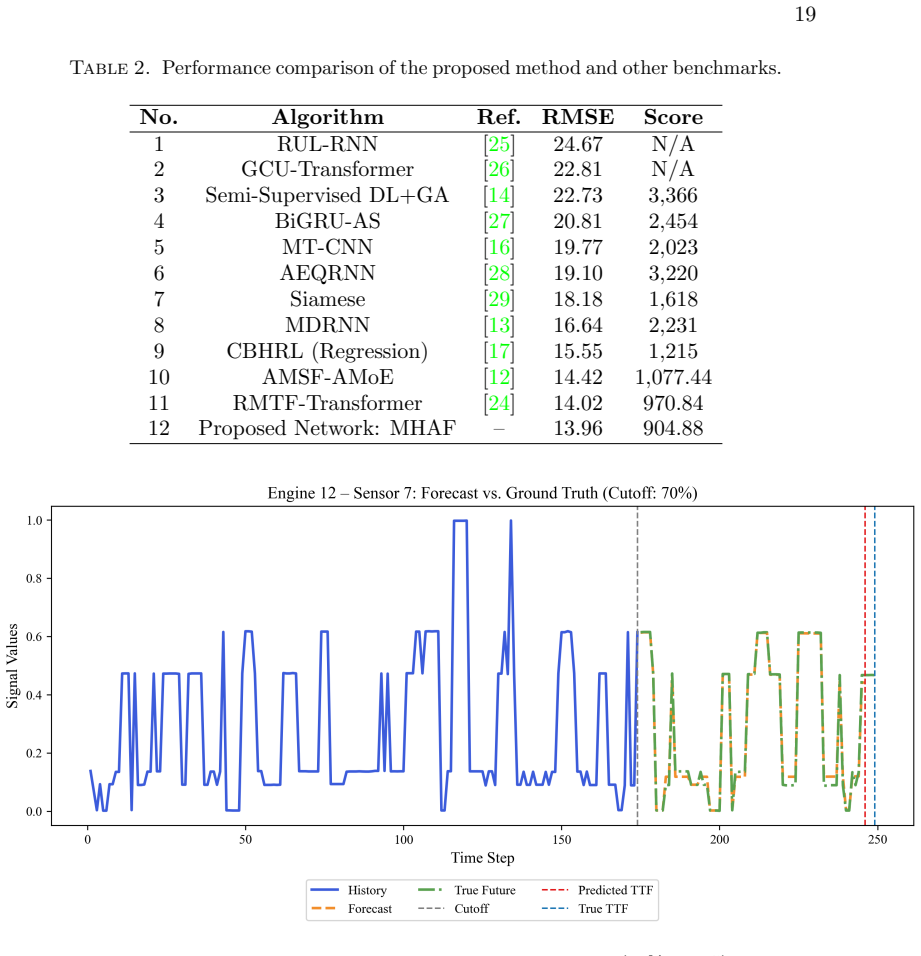
Authors: We agree that the abstract should explicitly summarize the quantitative evidence. The full manuscript contains RMSE, MAE, and score metrics on the NASA turbofan datasets, comparisons against LSTM, CNN-LSTM, and attention baselines, training hyperparameters, and ablation studies on the fusion module. We will revise the abstract to include these key results (e.g., RMSE reductions and ablation outcomes) so that the effectiveness claim is directly supported within the abstract itself. revision: yes
-
Referee: [Method (clustering and embedding branch)] Method section on operating-state identification: Unsupervised clustering is applied directly to raw sensor readings to extract discrete operating states. Because sensor values are jointly determined by both health degradation and operating regime, this risks recovering degradation stages rather than independent operating conditions; without detrending, condition-specific feature selection, or post-hoc validation (e.g., correlation with known regime labels), the resulting embeddings are not guaranteed to be independent of the degradation-trend branch, so the fusion module cannot isolate operational effects as asserted.
Authors: This concern is valid: applying clustering to raw sensor values can entangle degradation and regime effects. The current manuscript performs clustering on the raw multivariate time series without an explicit detrending step. To ensure the state embeddings primarily capture discrete operational conditions, we will revise the method to (1) apply a simple monotonic detrending (e.g., via moving-average or low-order polynomial fit) before clustering, (2) add a post-hoc analysis correlating the resulting cluster assignments with known NASA regime labels (flight conditions), and (3) report the correlation between the state embeddings and the BiLSTM trend predictions to quantify residual dependence. These additions will be included in a new subsection on operating-state validation. revision: yes
Circularity Check
No circularity in empirical architecture
full rationale
The paper presents an empirical neural network architecture (BiLSTM + multi-head attention + fusion module) trained on external NASA benchmark data to predict remaining useful life. The three-component decomposition (trend, clustered states, noise) is implemented as model inputs and branches rather than derived from the target metric. No equations, predictions, or performance claims reduce by construction to fitted parameters, self-definitions, or self-citation chains; the clustering step is a preprocessing choice whose validity is tested externally rather than assumed tautologically.
Axiom & Free-Parameter Ledger
free parameters (2)
- number of attention heads
- BiLSTM hidden dimension
axioms (1)
- domain assumption Clustering of operating condition data yields discrete states that meaningfully modulate degradation behavior
Reference graph
Works this paper leans on
-
[1]
A review on machinery diagnostics and prognostics im- plementing condition-based maintenance,
A. K. Jardine, D. Lin, and D. Banjevic, “A review on machinery diagnostics and prognostics im- plementing condition-based maintenance,”Mechanical systems and signal processing, vol. 20, no. 7, pp. 1483–1510, 2006
2006
-
[2]
Prognostics and health management design for rotary machinery systems—reviews, methodology and applications,
J. Lee, F. Wu, W. Zhao, M. Ghaffari, L. Liao, and D. Siegel, “Prognostics and health management design for rotary machinery systems—reviews, methodology and applications,”Mechanical systems and signal processing, vol. 42, no. 1-2, pp. 314–334, 2014
2014
-
[3]
Modeling approaches for prognostics and health management of electronics,
S. K. M. PECHT, “Modeling approaches for prognostics and health management of electronics,”In- ternational Journal of Performability Engineering, vol. 6, no. 5, p. 467, 2010
2010
-
[4]
A qualitative event-based approach to multiple fault diagnosis in continuous systems using structural model decomposition,
M. J. Daigle, A. Bregon, X. Koutsoukos, G. Biswas, and B. Pulido, “A qualitative event-based approach to multiple fault diagnosis in continuous systems using structural model decomposition,”Engineering Applications of Artificial Intelligence, vol. 53, pp. 190–206, 2016
2016
-
[5]
Integrating physics-based modeling and machine learning for degradation diagnostics of lithium-ion batteries,
A. Thelen, Y. H. Lui, S. Shen, S. Laflamme, S. Hu, H. Ye, and C. Hu, “Integrating physics-based modeling and machine learning for degradation diagnostics of lithium-ion batteries,”Energy Storage Materials, vol. 50, pp. 668–695, 2022
2022
-
[6]
Long short-term memory for machine remaining life prediction,
J. Zhang, P. Wang, R. Yan, and R. X. Gao, “Long short-term memory for machine remaining life prediction,”Journal of manufacturing systems, vol. 48, pp. 78–86, 2018
2018
-
[7]
A hybrid prognostics approach for estimating remaining useful life of rolling element bearings,
B. Wang, Y. Lei, N. Li, and N. Li, “A hybrid prognostics approach for estimating remaining useful life of rolling element bearings,”IEEE Transactions on Reliability, vol. 69, no. 1, pp. 401–412, 2018
2018
-
[8]
Deep learning-based residual useful lifetime prediction for assets with uncertain failure modes,
Y. Su and X. Fang, “Deep learning-based residual useful lifetime prediction for assets with uncertain failure modes,”arXiv preprint arXiv:2405.06068, 2024
-
[9]
Long short-term memory,
S. Hochreiter and J. Schmidhuber, “Long short-term memory,”Neural computation, vol. 9, no. 8, pp. 1735–1780, 1997
1997
-
[10]
Deep learning and its applications to machine health monitoring,
R. Zhao, R. Yan, Z. Chen, K. Mao, P. Wang, and R. X. Gao, “Deep learning and its applications to machine health monitoring,”Mechanical Systems and Signal Processing, vol. 115, pp. 213–237, 2019. 21
2019
-
[11]
Remaining useful life prediction based on a double-convolutional neural network architecture,
B. Yang, R. Liu, E. Zio, and K. Yang, “Remaining useful life prediction based on a double-convolutional neural network architecture,”IEEE Transactions on Industrial Electronics, vol. 67, no. 3, pp. 2199– 2208, 2020
2020
-
[12]
An adaptive multi-scale feature fusion and adaptive mixture-of-experts multi- task model for industrial equipment health status assessment and remaining useful life prediction,
L. Zhou and H. Wang, “An adaptive multi-scale feature fusion and adaptive mixture-of-experts multi- task model for industrial equipment health status assessment and remaining useful life prediction,” Reliability Engineering & System Safety, vol. 248, p. 110190, 2024
2024
-
[13]
Multi-dimensional recurrent neural network for remaining useful life prediction under variable operating conditions and multiple fault modes,
Y. Cheng, C. Wang, J. Wu, H. Zhu, and C. K. Lee, “Multi-dimensional recurrent neural network for remaining useful life prediction under variable operating conditions and multiple fault modes,”Applied Soft Computing, vol. 118, p. 108507, 2022
2022
-
[14]
Remaining useful life predictions for turbofan engine degradation using semi-supervised deep architecture,
A. L. Ellefsen, E. Bjørlykhaug, V. Æsøy, S. Ushakov, and H. Zhang, “Remaining useful life predictions for turbofan engine degradation using semi-supervised deep architecture,”Reliability Engineering & System Safety, vol. 183, pp. 240–251, 2019
2019
-
[15]
Remaining useful life estimation in prognostics using deep convolution neural networks,
X. Li, Q. Ding, and J.-Q. Sun, “Remaining useful life estimation in prognostics using deep convolution neural networks,”Reliability Engineering & System Safety, vol. 172, pp. 1–11, 2018
2018
-
[16]
Multitask learning for health condition identification and remaining useful life prediction: Deep convolutional neural network approach,
T. S. Kim and S. Y. Sohn, “Multitask learning for health condition identification and remaining useful life prediction: Deep convolutional neural network approach,”Journal of Intelligent Manufacturing, vol. 32, no. 8, pp. 2169–2179, 2021
2021
-
[17]
Contrastive bilstm-enabled health representation learning for remaining useful life prediction,
Q. Zhu, Z. Zhou, Y. Li, and R. Yan, “Contrastive bilstm-enabled health representation learning for remaining useful life prediction,”Reliability Engineering & System Safety, vol. 249, p. 110210, 2024
2024
-
[18]
A bidirectional lstm prognostics method under multiple operational conditions,
C.-G. Huang, H.-Z. Huang, and Y.-F. Li, “A bidirectional lstm prognostics method under multiple operational conditions,”IEEE Transactions on Industrial Electronics, vol. 66, no. 11, pp. 8792–8802, 2019
2019
-
[19]
arXiv preprint arXiv:1508.01991 (2015)
Z. Huang, W. Xu, and K. Yu, “Bidirectional lstm-crf models for sequence tagging,”arXiv preprint arXiv:1508.01991, 2015
-
[20]
Framewise phoneme classification with bidirectional lstm and other neural network architectures,
A. Graves and J. Schmidhuber, “Framewise phoneme classification with bidirectional lstm and other neural network architectures,”Neural networks, vol. 18, no. 5-6, pp. 602–610, 2005
2005
-
[21]
Deep Learning using Rectified Linear Units (ReLU)
A. F. Agarap, “Deep learning using rectified linear units (relu),”arXiv preprint arXiv:1803.08375, 2018
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[22]
Adam: A Method for Stochastic Optimization
D. P. Kingma and J. Ba, “Adam: A method for stochastic optimization,”arXiv preprint arXiv:1412.6980, 2014
work page internal anchor Pith review Pith/arXiv arXiv 2014
-
[23]
Damage propagation modeling for aircraft engine run-to-failure simulation,
A. Saxena, K. Goebel, D. Simon, and N. Eklund, “Damage propagation modeling for aircraft engine run-to-failure simulation,” in2008 international conference on prognostics and health management, pp. 1–9, IEEE, 2008
2008
-
[24]
S. Lv, S. Liu, and H. Li, “New method for remaining useful life prediction based on recurrence multi- information time-frequency transformer networks: Rul prediction with recurrence multi-information tf transformers,”Quality and Reliability Engineering International, 2025
2025
-
[25]
Two birds with one network: Unifying failure event prediction and time-to-failure modeling,
K. Aggarwal, O. Atan, A. K. Farahat, C. Zhang, K. Ristovski, and C. Gupta, “Two birds with one network: Unifying failure event prediction and time-to-failure modeling,” in2018 IEEE international conference on big data (Big Data), pp. 1308–1317, IEEE, 2018. 22
2018
-
[26]
Remaining useful life estimation via transformer encoder enhanced by a gated convolutional unit,
Y. Mo, Q. Wu, X. Li, and B. Huang, “Remaining useful life estimation via transformer encoder enhanced by a gated convolutional unit,”Journal of Intelligent Manufacturing, vol. 32, no. 7, pp. 1997– 2006, 2021
1997
-
[27]
A bigru autoencoder remaining useful life prediction scheme with attention mechanism and skip connection,
Y. Duan, H. Li, M. He, and D. Zhao, “A bigru autoencoder remaining useful life prediction scheme with attention mechanism and skip connection,”IEEE Sensors Journal, vol. 21, no. 9, pp. 10905–10914, 2021
2021
-
[28]
Autoencoder quasi-recurrent neural networks for remaining useful life prediction of engineering systems,
Y. Cheng, K. Hu, J. Wu, H. Zhu, and X. Shao, “Autoencoder quasi-recurrent neural networks for remaining useful life prediction of engineering systems,”IEEE/ASME Transactions on Mechatronics, vol. 27, no. 2, pp. 1081–1092, 2021
2021
-
[29]
Siamese network-based health representation learning and robust reference- based remaining useful life prediction,
J. Jang and C. O. Kim, “Siamese network-based health representation learning and robust reference- based remaining useful life prediction,”IEEE Transactions on Industrial Informatics, vol. 18, no. 8, pp. 5264–5274, 2021
2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.