Self-contact in a buckled elastica
Pith reviewed 2026-05-10 11:56 UTC · model grok-4.3
The pith
A scale-invariant condition derived from two elastica integrals determines the compressive load at which self-contact begins in a buckled elastica.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
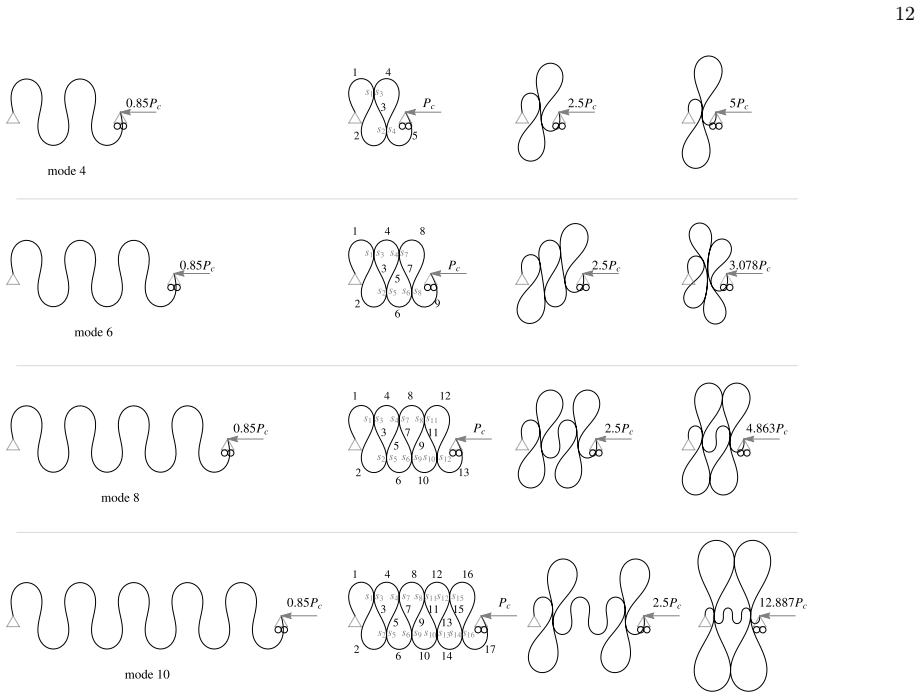
Using two integrals associated with the elastica, the authors derive a scale-invariant condition necessary for the onset of frictionless self-contact. This condition is independent of boundary conditions and does not require the position vectors of material points, and it directly provides the value of the compressive load at which contact initiates. They further demonstrate that the Hamiltonian integral persists after contact and compute post-contact configurations for modes three through ten in the pinned-pinned case, noting multiple configurations at certain loads for modes eight and nine, and that an infinite force is needed to transition from point to line contact in symmetric odd-mode
What carries the argument
two integrals associated with the elastica (one of which is the Hamiltonian) that remain valid under frictionless contact and yield the onset condition without position vectors
If this is right
- The compressive load at which self-contact begins can be read directly from the scale-invariant condition.
- The Hamiltonian integral continues to hold after contact forms.
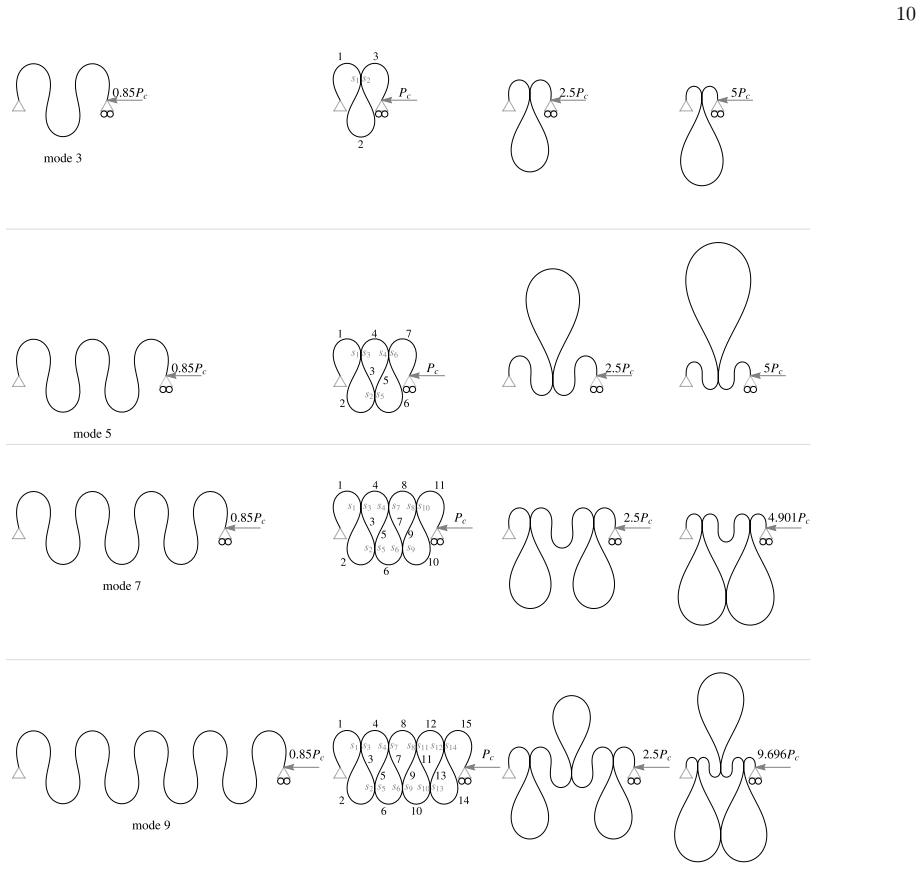
- Post-contact shapes can be computed for buckling modes three through ten, with multiple distinct configurations appearing for modes eight and nine at fixed loads.
- An infinite compressive force is required to convert point contact into line contact in symmetric configurations of odd modes.
Where Pith is reading between the lines
- The integral-based condition may allow similar onset predictions for self-contact in other inextensible rods or filaments whose governing equations admit conserved quantities.
- Because the condition is scale-invariant, it could be applied across different length scales without rescaling the entire problem.
- The persistence of the Hamiltonian suggests that energy-like quantities remain useful for classifying post-contact states even after geometric constraints are added.
Load-bearing premise
The two integrals associated with the elastica remain valid and sufficient to derive the contact-onset condition under the assumption of frictionless self-contact.
What would settle it
A direct measurement or simulation of the compressive load at the instant a physical or numerical buckled elastica first achieves self-contact, checked against the load value delivered by the scale-invariant condition.
Figures







read the original abstract
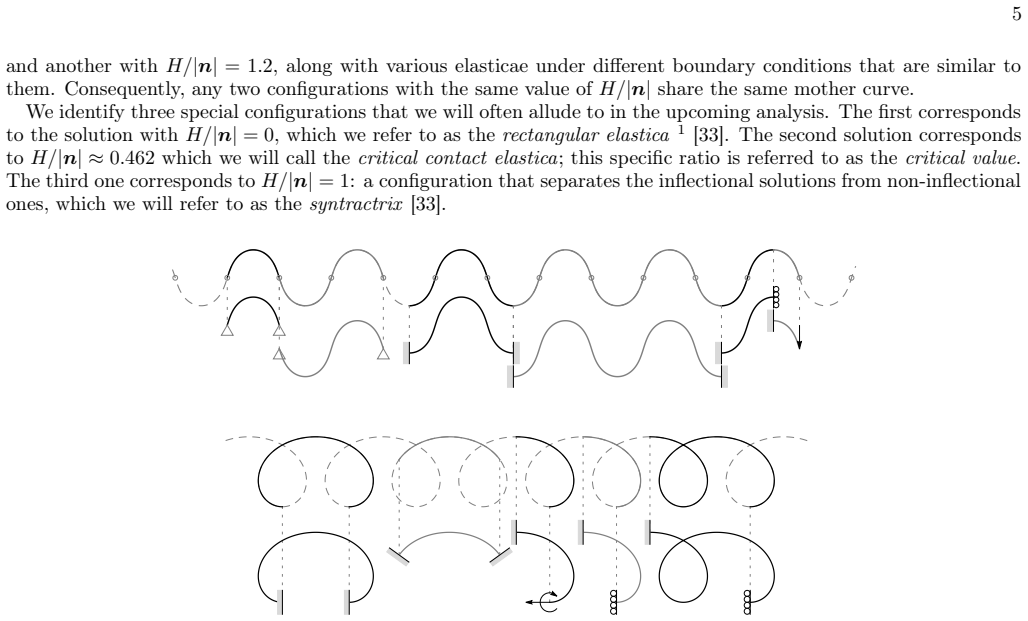
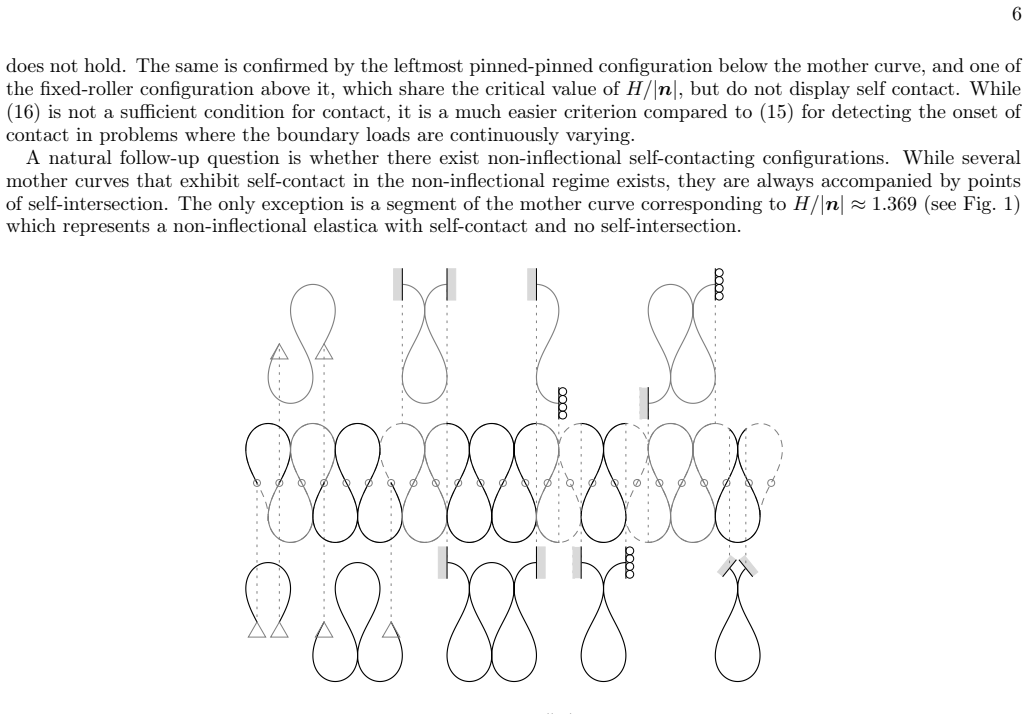
We explore the mechanics of a terminally loaded buckled elastica under frictionless self-contact. With the aid of two integrals associated with the elastica, we propose a scale-invariant condition necessary for the onset of contact. The condition is independent of the boundary conditions, does not involve the position vectors of the material points, and delivers the value of the compressive load at which self-contact initiates. Furthermore, we show that one of the two integrals, namely the \emph{Hamiltonian}, persists after contact. We compute post-contact configurations of modes three through ten for a pinned-pinned buckled elastica. At a given value of the compressive load, we report multiple post-contact configurations for modes eight and nine. Finally, we show that an infinite force is required to transition from a point contact to a line contact in symmetric post-contact configurations of odd modes.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript examines frictionless self-contact in a terminally loaded buckled planar elastica. Using the two standard first integrals of the elastica (moment balance and the Hamiltonian), it derives a scale-invariant algebraic condition on the load parameter and local angle that is necessary for the onset of contact. This condition is independent of boundary conditions and does not require explicit position quadratures. The paper further shows that the Hamiltonian remains conserved after frictionless point contact, computes post-contact shapes for pinned-pinned modes 3–10, reports multiple post-contact equilibria for modes 8 and 9 at fixed load, and demonstrates that an infinite compressive force is required to transition from point to line contact in symmetric odd-mode configurations.
Significance. If the derivation holds, the scale-invariant onset condition provides a practical, boundary-condition-independent route to predict the compressive load at first contact without solving the full boundary-value problem or integrating position vectors. The persistence of the Hamiltonian under holonomic normal contact is a clean observation that simplifies post-contact modeling. The numerical post-contact shapes for modes 3–10, including multiplicity at higher modes, supply concrete data that can be used for validation or design in applications involving slender rods or filaments.
minor comments (3)
- The abstract states that the condition 'delivers the value of the compressive load'; the main text should clarify whether this yields an explicit numerical value for the load parameter or only a relation that must be solved together with the boundary conditions.
- The numerical post-contact configurations are presented for modes 3–10, but the text does not specify the discretization method, convergence criteria, or how multiple solutions for modes 8 and 9 were isolated; adding a brief methods paragraph or appendix would improve reproducibility.
- Figure captions for the post-contact shapes should indicate the value of the compressive load parameter at which each configuration is shown, to allow direct comparison with the onset condition.
Simulated Author's Rebuttal
We thank the referee for the positive and accurate summary of our manuscript on frictionless self-contact in a terminally loaded buckled planar elastica. We appreciate the recognition of the scale-invariant algebraic condition derived from the two elastica integrals, the persistence of the Hamiltonian under contact, and the computed post-contact equilibria for modes 3–10. The recommendation for minor revision is noted.
Circularity Check
No significant circularity; derivation uses standard independent integrals
full rationale
The central derivation applies the two well-known first integrals of the planar elastica (moment balance and energy/Hamiltonian) to obtain an algebraic, scale-invariant relation for contact onset. These integrals are standard results from the autonomous ODE, independent of the paper's own inputs, boundary conditions, or position quadratures. The post-contact persistence of the Hamiltonian follows directly from the fact that frictionless point contact exerts a holonomic normal force doing no virtual work. No step reduces by construction to a fitted parameter, self-citation chain, or renamed input; the result is externally verifiable against classical elastica theory.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The elastica equations describe the equilibrium shapes of inextensible elastic rods under bending moments.
- domain assumption Self-contact occurs under frictionless conditions.
Reference graph
Works this paper leans on
-
[1]
Contact problems involving a buckled elastica,
J. E. Flaherty and J. B. Keller, “Contact problems involving a buckled elastica,” SIAM Journal on Applied Mathematics 24, 215–225 (1973)
work page 1973
-
[2]
Contact problems involving a buckled elastica,
J.E. Flaherty and J.B. Keller, “Contact problems involving a buckled elastica,” SIAM Journal of Applied Mathematics24, 215–225 (1973)
work page 1973
-
[3]
On the planar elastica, stress, and material stress,
H. Singh and J.A. Hanna, “On the planar elastica, stress, and material stress,” Journal of Elasticity136, 87–101 (2019)
work page 2019
-
[4]
Variational theory for spatial rods,
D. J. Steigmann and M. G. Faulkner, “Variational theory for spatial rods,” Journal of Elasticity33, 1–26 (1993)
work page 1993
-
[5]
A material momentum balance law for rods,
O. M. O’Reilly, “A material momentum balance law for rods,” Journal of Elasticity86, 155–172 (2007)
work page 2007
-
[6]
Planar equilibria of an elastic rod wrapped around a circular capstan,
H. Singh, “Planar equilibria of an elastic rod wrapped around a circular capstan,” Journal of Elasticity152, 321–352 (2022)
work page 2022
-
[7]
A noetherian approach to invariants for the statics and dynamics of elastic rods,
S. Neukirch and F. Bertails-Descoubes, “A noetherian approach to invariants for the statics and dynamics of elastic rods,” International Journal of Non-Linear Mechanics181, 105269 (2025)
work page 2025
-
[8]
Theory of supercoiled elastic rings with self-contact and its application to DNA plasmids,
B.D. Coleman and D. Swigon, “Theory of supercoiled elastic rings with self-contact and its application to DNA plasmids,” Journal of Elasticity60, 173–221 (2000)
work page 2000
-
[9]
Modeling and numerical treatment of elastic rods with frictionless self-contact,
M. Chamekh, S. Mani-Aouadi, and M. Moakher, “Modeling and numerical treatment of elastic rods with frictionless self-contact,” Computer Methods in Applied Mechanics and Engineering198, 3751–3764 (2009)
work page 2009
-
[10]
G. Domokos, P. Holmes, and B. Royce, “Constrained euler buckling,” Journal of Nonlinear Science7, 281–314 (1997)
work page 1997
-
[11]
Deflections and buckling of a bent elastica in contact with a flat surface,
R. H. Plaut, S. Suherman, D. A. Dillard, B. E. Williams, and L. T. Watson, “Deflections and buckling of a bent elastica in contact with a flat surface,” International Journal of Solids and Structures36, 1209–1229 (1999)
work page 1999
-
[12]
Uniqueness of solutions for constrained elastica,
A. Pocheau and B. Roman, “Uniqueness of solutions for constrained elastica,” Physica D: Nonlinear Phenomena192, 161–186 (2004)
work page 2004
-
[13]
Planar elastica inside a curved tube with clearance,
J. S. Chen and C. W. Li, “Planar elastica inside a curved tube with clearance,” International Journal of Solids and Structures44, 6173–6186 (2007)
work page 2007
-
[14]
Eulerian formulation of elastic rods,
A. Huynen, E. Detournay, and V. Denoel, “Eulerian formulation of elastic rods,” Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences472, 20150547 (2016)
work page 2016
-
[15]
Mechanics of two filaments in tight orthogonal contact,
P. Grandgeorge, C. Baek, H. Singh, P. Johanns, T. G. Sano, A. Flynn, J. H. Maddocks, and P. M. Reis, “Mechanics of two filaments in tight orthogonal contact,” Proceedings of the National Academy of Sciences118, e2021684118 (2021)
work page 2021
-
[16]
Self-encapsulation, or the ‘dripping’ of an elastic rod,
F. Bosi, D. Misseroni, F. Dal Corso, and D. Bigoni, “Self-encapsulation, or the ‘dripping’ of an elastic rod,” Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences471, 20150195 (2015)
work page 2015
-
[17]
Vibration and snapping of a self-contacted beam under prescribed end rotations,
J. S. Chen and C. C. Lee, “Vibration and snapping of a self-contacted beam under prescribed end rotations,” European Journal of Mechanics - A/Solids85, 104117 (2021)
work page 2021
-
[18]
Snap-through of shallow elastic arches under end moments,
R. H. Plaut, “Snap-through of shallow elastic arches under end moments,” Journal of Applied Mechanics76, 014504 (2008)
work page 2008
-
[19]
Snap boundary of self-contacted planar elastica under prescribed end rotations,
J. S. Chen and C. C. Lee, “Snap boundary of self-contacted planar elastica under prescribed end rotations,” International Journal of Non-Linear Mechanics135, 103758 (2021)
work page 2021
-
[20]
Snap-through and pull-in instabilities of an arch-shaped beam under an electrostatic loading,
W. Zhang, Y. Shao, and R. Li, “Snap-through and pull-in instabilities of an arch-shaped beam under an electrostatic loading,” Journal of Microelectromechanical Systems24, 1190–1204 (2015)
work page 2015
-
[21]
Distributed piezoelectric actuation of a bistable buckled beam,
C. Maurini, J. Pouget, and S. Vidoli, “Distributed piezoelectric actuation of a bistable buckled beam,” European Journal of Mechanics - A/Solids26, 837–853 (2007)
work page 2007
-
[22]
The pull-in behavior of electrostatically actuated bistable microstructures,
S. Krylov, B. R. Ilic, D. Schreiber, S. Seretensky, and H. Craighead, “The pull-in behavior of electrostatically actuated bistable microstructures,” Journal of Micromechanics and Microengineering18, 055026 (2008)
work page 2008
-
[23]
Wrapping thick membranes with slipping folds,
M. Arya, N. Lee, and S. Pellegrino, “Wrapping thick membranes with slipping folds,” in2nd AIAA Spacecraft Structures Conference(2015) p. 0682. 17
work page 2015
-
[24]
The kirchhoff elastic rod, the nonlinear schrödinger equation, and dna supercoiling,
Y. Shi and J. E. Hearst, “The kirchhoff elastic rod, the nonlinear schrödinger equation, and dna supercoiling,” The Journal of Chemical Physics101, 5186–5200 (1994)
work page 1994
-
[25]
Post buckling behavior of elastic tubes and rings with opposite sides in contact,
J. E. Flaherty, J. B. Keller, and S. I. Rubinow, “Post buckling behavior of elastic tubes and rings with opposite sides in contact,” SIAM Journal on Applied Mathematics23, 446–455 (1972)
work page 1972
-
[26]
Artery buckling: New phenotypes, models, and applications,
H. C. Han, “Artery buckling: New phenotypes, models, and applications,” Annals of Biomedical Engineering40, 504–516 (2012)
work page 2012
-
[27]
S. S. Antman,Nonlinear Problems of Elasticity, Applied Mathematical Sciences, Vol. 107 (Springer, New York, 1995)
work page 1995
-
[28]
O. M. O’Reilly,Modeling nonlinear problems in the mechanics of strings and rods(Springer, Cham, 2017)
work page 2017
-
[29]
Peeling, slipping and cracking–some one-dimensional free-boundary problems in mechanics,
R. Burridge and J. B. Keller, “Peeling, slipping and cracking–some one-dimensional free-boundary problems in mechanics,” SIAM Review20, 31–61 (1978)
work page 1978
-
[30]
Partial constraint singularities in elastic rods,
J. A. Hanna, H. Singh, and E. G. Virga, “Partial constraint singularities in elastic rods,” Journal of Elasticity (2018)
work page 2018
-
[31]
J. H. Maddocks and J. B. Keller, “Ropes in equilibrium,” SIAM Journal of Applied Mathematics47, 1185–1200 (1987)
work page 1987
-
[32]
Conservation laws in the dynamics of rods,
J. H. Maddocks and D. J. Dichmann, “Conservation laws in the dynamics of rods,” Journal of Elasticity34, 83–96 (1994)
work page 1994
-
[33]
Levien,The elastica: a mathematical history, Tech
R. Levien,The elastica: a mathematical history, Tech. Rep. (Technical Report UCB/EECS-2008-103, EECS Department, University of California, Berkeley, 2008)
work page 2008
-
[34]
E. J. Doedel and B. E. Oldeman,AUTO-07P: Continuation and Bifurcation Software for Ordinary Differential Equations, Montreal, Canada (2007), concordia University
work page 2007
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.