Recognition: unknown
Consistent control of energy dissipation in non-spherical particle contact via a structure-preserving formulation
Pith reviewed 2026-05-10 02:54 UTC · model grok-4.3
The pith
The damping law for non-spherical particle contacts is fixed by the harmonic structure revealed in energy-phase transformed space.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By projecting the dynamics onto contact degrees of freedom, the interaction is governed by an instantaneous contact dynamics with a configuration-dependent projected mass and intrinsic translational-rotational coupling. Building on the exact energy-phase transformation for monotone conservative contact, consistent dissipation requires a unique damping structure aligned with the underlying contact energy. The admissible damping law is therefore fixed by the harmonic structure in transformed space, and the appropriate coefficient of restitution is the contact-point value e_cn while the total energy restitution e_E is a geometry-dependent outcome that includes coupling-induced energy transfer.
What carries the argument
The energy-phase transformation for monotone conservative contact, applied after projecting the full dynamics onto the instantaneous contact degrees of freedom.
If this is right
- The admissible damping law is determined by the revealed harmonic structure rather than chosen empirically.
- Numerical implementations control the contact-point restitution e_cn consistently across all impact configurations.
- Observed variation in total energy restitution e_E is explained directly by the coupled translational-rotational dynamics and changing geometry.
- Structure-preserving time integrators can now be constructed that maintain the derived dissipation properties for non-spherical particles.
Where Pith is reading between the lines
- The projection approach may extend to simultaneous multi-contact events if the instantaneous contact frames can be composed without loss of the energy-phase property.
- Experimental restitution measurements on non-spherical bodies should target the local contact-point value rather than integrated energy loss to match the theory.
- Large-scale discrete-element codes could adopt the formulation to reduce spurious energy drift when simulating powders, rocks, or granular flows with irregular shapes.
- Incorporating friction would require extending the energy-phase transformation to include tangential coupling while preserving the same structural constraints on damping.
Load-bearing premise
The exact energy-phase transformation derived for simple monotone conservative contact continues to hold after projection onto the coupled, configuration-dependent dynamics of non-spherical particles.
What would settle it
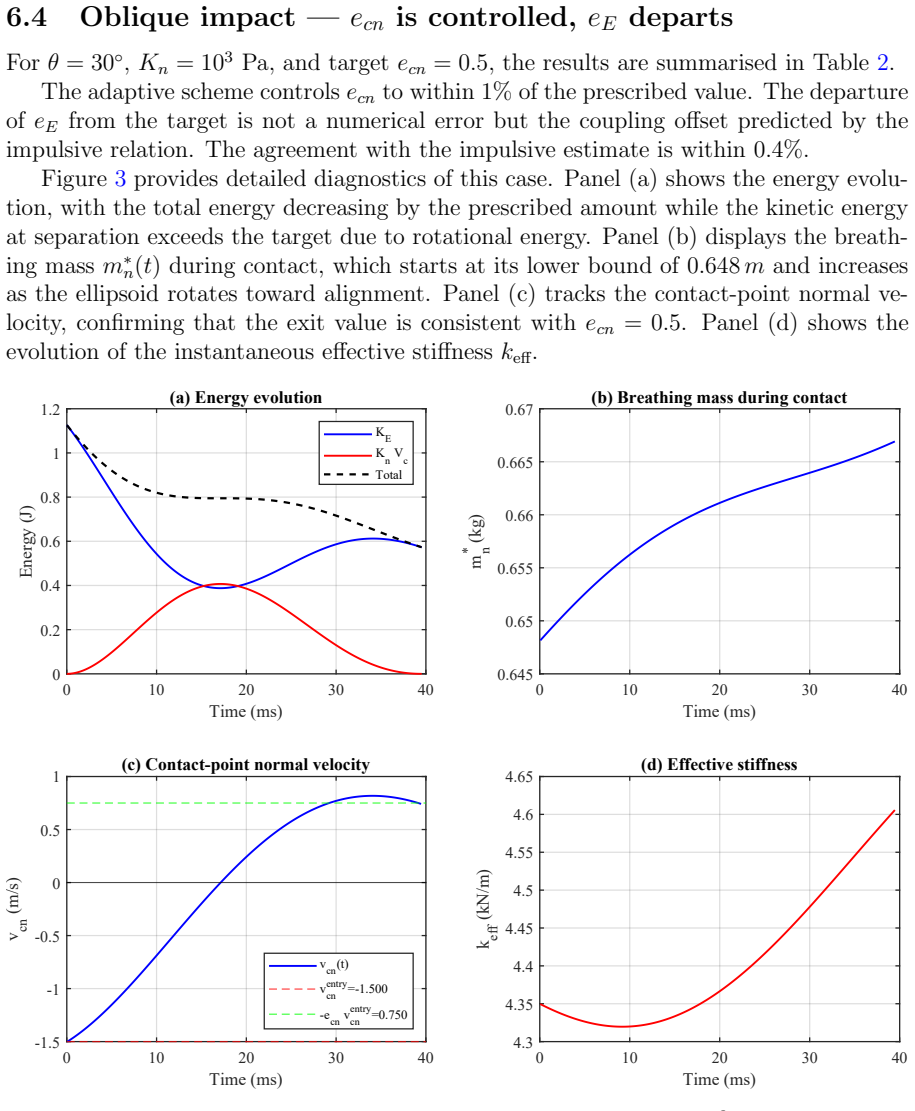
Numerical simulation of a smooth single-contact impact on an ellipsoid showing that the proposed damping law fails to keep the measured contact-point restitution e_cn constant when the impact angle or contact normal is varied.
Figures





read the original abstract
The control of energy dissipation in non-spherical particle contact remains an unresolved problem. Unlike spherical contact, where the interaction reduces to a one-dimensional normal oscillator, both the effective inertia and the effective stiffness depend on the evolving contact geometry, and the impact dynamics are intrinsically coupled across translational, rotational, and tangential directions. Classical damping formulations are therefore structurally incompatible with the contact dynamics they are intended to represent. This work addresses the problem from first principles. By projecting the dynamics onto contact degrees of freedom, the interaction is shown to be governed by an instantaneous contact dynamics with a configuration-dependent projected mass and intrinsic translational--rotational coupling. Building on the exact energy--phase transformation for monotone conservative contact, we show that consistent dissipation requires a unique damping structure aligned with the underlying contact energy. The analysis leads to two central consequences. First, the admissible damping law is not empirical but fixed by the harmonic structure revealed in transformed space. Second, the appropriate coefficient of restitution for non-spherical particles is the contact-point restitution $e_{cn}$, whereas the total energy restitution $e_E$ is a geometry-dependent outcome that includes coupling-induced energy transfer. Numerical evidence based on smooth single-contact impacts confirms the theory: the resulting formulation controls $e_{cn}$ consistently across impact configurations, while the apparent variability of $e_E$ follows directly from the coupled dynamics.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a first-principles derivation for consistent energy dissipation control in non-spherical particle contacts. Rigid-body dynamics are projected onto instantaneous contact coordinates, yielding a reduced system with configuration-dependent projected mass, stiffness, and translational-rotational coupling. Building on an energy-phase transformation previously derived for monotone conservative contact, the authors obtain a unique damping structure aligned with the contact energy. This leads to the claims that the admissible damping law is fixed by the resulting harmonic structure (not empirical) and that the contact-point restitution e_cn is the appropriate controlled quantity, while total energy restitution e_E is a derived, geometry-dependent outcome. Numerical tests on smooth single-contact impacts are said to confirm consistent control of e_cn.
Significance. If the energy-phase transformation extends rigorously to the variable-inertia projected dynamics, the result would be significant for computational granular mechanics: it replaces ad-hoc damping with a structure-preserving law that distinguishes intrinsic contact restitution from observable total-energy loss arising from coupling. This could improve predictive accuracy in DEM simulations of irregular particles without introducing free parameters. The projection approach and the explicit separation of e_cn from e_E are conceptually strong contributions if the central derivation holds.
major comments (2)
- [Abstract and central derivation] Abstract, central derivation paragraph: the admissible damping law is obtained by invoking the exact energy-phase transformation for monotone conservative contact to produce a harmonic structure in transformed variables. However, the projected non-spherical dynamics have a configuration-dependent (time-varying during impact) effective mass matrix, as explicitly stated in the abstract ('configuration-dependent projected mass' and 'evolving contact geometry'). The original transformation assumes constant inertia to guarantee autonomy and uniqueness of the aligned damping; with variable inertia the reduced equations are non-autonomous, so the uniqueness and structural alignment of the damping law are not guaranteed by the same argument. This is load-bearing for the claim that dissipation control is 'fixed by the harmonic structure' rather than empirical.
- [Numerical evidence] Numerical evidence paragraph: confirmation is restricted to smooth single-contact impacts. While these tests may show control of e_cn for the chosen cases, they do not address whether the damping structure remains consistent when projected inertia variation is strong (e.g., highly eccentric contacts or rapid geometry changes) or when multiple simultaneous contacts occur. The generalization asserted in the abstract therefore rests on an untested extension of the transformation.
minor comments (2)
- [Abstract] The abstract introduces e_cn and e_E without a brief parenthetical definition; a short clarification of 'contact-point restitution' versus 'total energy restitution' would improve immediate readability.
- [Abstract] The prior energy-phase transformation is referenced but not cited with a specific equation or paper number in the provided text; adding the reference at first mention would allow readers to verify the constant-inertia assumption directly.
Simulated Author's Rebuttal
We thank the referee for the thorough review and valuable comments, which help clarify the scope and foundations of our derivation. We address the two major comments point by point below, indicating where revisions have been made to strengthen the manuscript.
read point-by-point responses
-
Referee: [Abstract and central derivation] Abstract, central derivation paragraph: the admissible damping law is obtained by invoking the exact energy-phase transformation for monotone conservative contact to produce a harmonic structure in transformed variables. However, the projected non-spherical dynamics have a configuration-dependent (time-varying during impact) effective mass matrix, as explicitly stated in the abstract ('configuration-dependent projected mass' and 'evolving contact geometry'). The original transformation assumes constant inertia to guarantee autonomy and uniqueness of the aligned damping; with variable inertia the reduced equations are non-autonomous, so the uniqueness and structural alignment of the damping law are not guaranteed by the same argument. This is load-bearing for the claim that dissipation control is 'fixed by the harmonic structure' rather than empirical.
Authors: We appreciate the referee's identification of this subtlety. The energy-phase transformation is applied instantaneously to the projected contact dynamics at each configuration, treating the local effective mass matrix as fixed for the purpose of defining the harmonic oscillator structure and the unique damping that aligns with the contact energy. This local alignment fixes the damping law without requiring global autonomy. Nevertheless, we acknowledge that the original transformation was stated for constant inertia and that a more detailed justification for the non-autonomous case strengthens the uniqueness argument. In the revised manuscript we have inserted a clarifying paragraph in the central derivation section that explicitly discusses the instantaneous application, the conditions for local structural preservation, and why the admissible damping remains uniquely determined by the energy form even under slow configuration variation during impact. revision: partial
-
Referee: [Numerical evidence] Numerical evidence paragraph: confirmation is restricted to smooth single-contact impacts. While these tests may show control of e_cn for the chosen cases, they do not address whether the damping structure remains consistent when projected inertia variation is strong (e.g., highly eccentric contacts or rapid geometry changes) or when multiple simultaneous contacts occur. The generalization asserted in the abstract therefore rests on an untested extension of the transformation.
Authors: The numerical section deliberately isolates smooth single-contact events to provide clean verification of the predicted e_cn control across varying geometries. We agree that additional tests with rapid inertia changes or multiple simultaneous contacts would further support the generalization. The derivation itself is formulated per contact pair and extends directly to multi-contact situations by applying the same damping structure independently to each active contact while the rigid-body equations handle the overall coupling. In the revised manuscript we have added a short discussion paragraph noting this per-contact applicability, the assumptions involved, and the fact that comprehensive multi-contact validation lies beyond the present scope but follows the same structure-preserving principle. revision: partial
Circularity Check
No circularity: derivation proceeds from projection and independent transformation
full rationale
The paper begins by projecting rigid-body dynamics onto instantaneous contact coordinates to obtain a reduced system whose effective mass and stiffness are configuration-dependent. It then invokes the energy-phase transformation for monotone conservative contact (previously established) to identify the admissible damping structure aligned with contact energy. No step equates a derived quantity to a fitted parameter by construction, renames an input as a prediction, or reduces the central claim to a self-citation chain whose validity depends on the present result. The distinction between contact-point restitution e_cn and total energy restitution e_E is presented as a direct geometric consequence of the coupled projected equations rather than a redefinition. Numerical evidence is used only for confirmation, not as the source of the damping law.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption monotone conservative contact admits an exact energy-phase transformation
- domain assumption dynamics can be projected onto contact degrees of freedom with configuration-dependent projected mass and translational-rotational coupling
Reference graph
Works this paper leans on
-
[1]
P. A. Cundall, O. D. L. Strack, A discrete numerical model for granular assemblies, G´ eotechnique 29 (1979) 47–65
1979
-
[2]
K. H. Hunt, F. R. E. Crossley, Coefficient of restitution interpreted as damping in vibroimpact, Journal of Applied Mechanics 42 (2) (1975) 440–445
1975
-
[3]
H. M. Lankarani, P. E. Nikravesh, A contact force model with hysteresis damping for impact analysis of multibody systems, Journal of Mechanical Design 112 (3) (1990) 369–376
1990
-
[4]
Kruggel-Emden, E
H. Kruggel-Emden, E. Simsek, S. Rickelt, S. Wirtz, V. Scherer, Review and extension of normal force models for the discrete element method, Powder Technology 171 (3) (2007) 157–173
2007
-
[5]
Y. T. Feng, Thirty years of developments in contact modelling of non-spherical particles in DEM - a selective review, Acta Mechanica Sinica 39 (2023) 722343. doi:10.1007/s10409-022-22343-x. 22
-
[6]
Tsuji, T
Y. Tsuji, T. Tanaka, T. Ishida, Lagrangian numerical simulation of plug flow of cohesionless particles in a horizontal pipe, Powder Technology 71 (1992) 239–250
1992
-
[7]
Labous, A
L. Labous, A. Rosato, R. Dave, Measurements of collisional properties of spheres using high-speed video analysis, Physical Review E 56 (1997) 5717–5725
1997
-
[8]
Lorenz, C
A. Lorenz, C. Tuozzolo, M. Y. Louge, Measurements of impact properties of small, nearly spherical particles, Experimental Mechanics 37 (1997) 292–298
1997
-
[9]
S. F. Foerster, M. Y. Louge, H. Chang, K. Allia, Measurements of the collision properties of small spheres, Physics of Fluids 6 (1994) 1108–1115
1994
-
[10]
Schwager, T
T. Schwager, T. P¨ oschel, Coefficient of restitution for viscoelastic spheres: The effect of delayed recovery, Physical Review E 78 (2008) 051304
2008
-
[11]
Kuwabara, K
G. Kuwabara, K. Kono, Restitution coefficient in a collision between two spheres, Japanese Journal of Applied Physics 26 (1987) 1230–1233
1987
-
[12]
N. V. Brilliantov, F. Spahn, J.-M. Hertzsch, T. P¨ oschel, Model for collisions in granular gases, Physical Review E 53 (5) (1996) 5382–5392
1996
-
[13]
Antypov, J
D. Antypov, J. A. Elliott, On an analytical solution for the damped hertzian spring, EPL 94 (2011) 50004
2011
-
[14]
Y. T. Feng, Exact phase-space analytical solution for the power-law damped contact oscillator (2026).doi:10.48550/arXiv.2603.27764
-
[15]
Y. T. Feng, Hidden harmonic structure, universal damping, and stability bounds in nonlinear contact dynamics (2026).doi:10.48550/arXiv.2604.02533
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2604.02533 2026
-
[16]
G. Gilardi, I. Sharf, Literature survey of contact dynamics modelling, Mechanism and Machine Theory 37 (10) (2002) 1213–1239.doi:10.1016/S0094-114X(02)00045-9
-
[17]
W. J. Stronge, Impact Mechanics, Cambridge University Press, 2000
2000
-
[18]
R. M. Brach, Mechanical Impact Dynamics: Rigid Body Collisions, Wiley, 1991
1991
-
[19]
P. W. Cleary, Dem simulation of industrial particle flows: case studies of dragline excavators, mixing in tumblers and centrifugal mills, Powder Technology 199 (1) (2010) 33–40
2010
-
[20]
Podlozhnyuk, S
A. Podlozhnyuk, S. Pirker, C. Kloss, Efficient implementation of superquadric par- ticles in discrete element method within an open-source framework, Computational Particle Mechanics 4 (2017) 101–118
2017
-
[21]
G. Lu, J. R. Third, C. R. M¨ uller, Discrete element models for non-spherical parti- cle systems: From theoretical developments to applications, Chemical Engineering Science 127 (2015) 425–465
2015
- [22]
-
[23]
Y. T. Feng, An energy-conserving contact theory for discrete element modelling of arbitrarily shaped particles: contact volume based model and computational issues, Computer Methods in Applied Mechanics and Engineering 373 (2021) 113493.doi: 10.1016/j.cma.2020.113493
-
[24]
Y. T. Feng, Y. Tan, The minkowski overlap and the energy-conserving contact model for discrete element modeling of convex nonspherical particles, International Journal for Numerical Methods in Engineering 122 (2021) 6474–6496.doi:10.1002/nme. 6800
work page doi:10.1002/nme 2021
-
[25]
Featherstone, Rigid Body Dynamics Algorithms, Springer, 2014
R. Featherstone, Rigid Body Dynamics Algorithms, Springer, 2014
2014
-
[26]
Pfeiffer, C
F. Pfeiffer, C. Glocker, Multibody Dynamics with Unilateral Constraints, Springer, 1996
1996
-
[27]
Brogliato, Nonsmooth Mechanics, Springer, 1999
B. Brogliato, Nonsmooth Mechanics, Springer, 1999
1999
-
[28]
Goldsmith, Impact: The Theory and Physical Behaviour of Colliding Solids, Edward Arnold, London, 1960
W. Goldsmith, Impact: The Theory and Physical Behaviour of Colliding Solids, Edward Arnold, London, 1960
1960
-
[29]
F. G. Wolf, J. E. S. de Lima, M. A. S. S. da Costa, Angle-dependent restitution coef- ficient for collisions between non-spherical particles, Powder Technology 362 (2020) 1–10
2020
-
[30]
D. A. Gorham, A. H. Kharaz, The measurement of particle rebound characteristics, Powder Technology 112 (3) (2000) 193–202
2000
-
[31]
D. B. Hastie, Experimental measurement of the coefficient of restitution of irregular shaped particles, Chemical Engineering Science 101 (2013) 828–836
2013
-
[32]
Wilson, R
J. Wilson, R. Qiao, M. Kappes, J. Loebig, R. Clarkson, The importance of shape in particle rebound behaviors, ASME Journal of Turbomachinery 145 (4) (2023) 041005
2023
-
[33]
J. Wang, M. Zhang, L. Feng, H. Yang, Y. Wu, G. Yue, The behaviors of particle-wall collision for non-spherical particles: Experimental investigation, Powder Technology 363 (2020) 187–194.doi:10.1016/j.powtec.2019.12.041
-
[34]
H. Dong, M. H. Moys, Experimental study of oblique impacts with initial spin, Powder Technology 161 (1) (2006) 22–31.doi:10.1016/j.powtec.2005.09.001
-
[35]
J. E. Higham, P. Shepley, M. Shahnam, Measuring the coefficient of restitution for all six degrees of freedom, Granular Matter 21 (2) (2019) 15.doi:10.1007/ s10035-019-0871-0. 24
2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.