Recognition: unknown
sumo3Dviz: A three dimensional traffic visualisation
Pith reviewed 2026-05-10 01:37 UTC · model grok-4.3
The pith
sumo3Dviz converts standard SUMO outputs into high-quality 3D videos with external and first-person views.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that sumo3Dviz provides a simple, scriptable Python framework to convert standard SUMO simulation outputs into realistic 3D renderings, supporting both cinematic external cameras and first-person driver perspectives while remaining reproducible and free of proprietary dependencies.
What carries the argument
The central mechanism is the trajectory interpolation and orientation smoothing step that turns discrete SUMO outputs into visually coherent vehicle motion within the Python-based 3D rendering pipeline.
If this is right
- Batch video generation becomes feasible for large-scale scenario analysis and automated experiment pipelines.
- First-person perspectives enable driver-level experiences for virtual stated-preference studies without additional software licenses.
- Educational demonstrations and communication of simulation results gain realistic visual support across platforms.
- Reproducible workflows for mobility research become accessible to users without game-engine expertise.
Where Pith is reading between the lines
- The same interpolation approach could be tested on outputs from other microsimulation tools to check if visual coherence generalizes.
- Generated videos might serve as training data for computer-vision models that analyze traffic scenes from driver viewpoints.
- Integration with head-mounted displays could turn the first-person mode into a low-cost virtual-reality testing environment.
Load-bearing premise
That the smoothed 3D motion from discrete simulation steps will look natural enough to support valid human perception studies in traffic psychology and acceptance research.
What would settle it
A controlled user study in which participants give inconsistent preference ratings or acceptance scores for the same traffic scenarios when viewed in the generated 3D videos versus real-world footage or higher-fidelity renderings.
Figures







read the original abstract
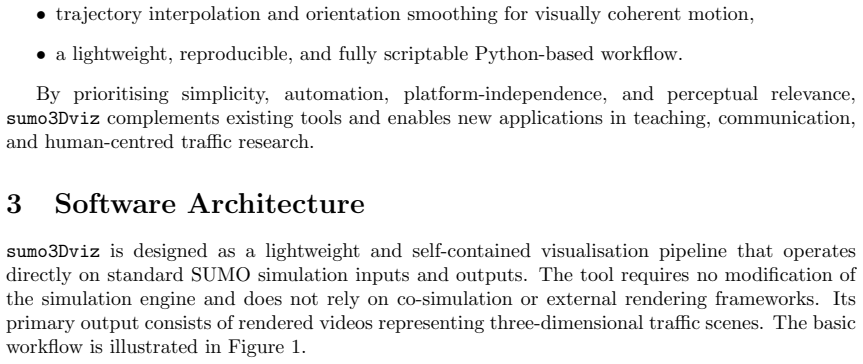
Traffic microsimulation software such as SUMO generate rich spatio-temporal data describing individual vehicle movements, interactions, and support the development of control strategies. While numerical outputs and 2D visualisations are sufficient for many technical analyses, they are often inadequate for applications that require intuitive interpretation, effective communication, or human-centred evaluation. In particular, user studies in mobility psychology, acceptance research, and virtual experience stated-preference experiments require realistic visualisations that reflect how traffic scenarios are perceived from a human perspective. This paper introduces sumo3Dviz, a lightweight, open-source 3D visualisation pipeline for SUMO traffic simulations. It converts standard SUMO simulation outputs, such as vehicle trajectories and signal states, into high-quality 3D renderings using a Python-based framework. In contrast to heavyweight game-engine-based approaches or tightly coupled co-simulation frameworks, sumo3Dviz is designed to be simple, scriptable, and reproducible. The tool is installable through the pip package manager, runs across operating systems, and works independently of any proprietary software or licenses. sumo3Dviz supports both external camera views and first-person perspectives, enabling cinematic overviews as well as driver-level experiences. The rendering process is optimized for batch video generation, making it suitable for large-scale scenario visualisation, educational demonstrations, and automated experiment pipelines. A key technical challenge addressed by the tool is trajectory interpolation and orientation smoothing, enabling visually coherent motion from discrete simulation outputs. Source Code on project's GitHub page: https://github.com/DerKevinRiehl/sumo3dviz/.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces sumo3Dviz, a lightweight, open-source Python-based 3D visualisation pipeline for SUMO traffic simulations. It converts standard SUMO simulation outputs into high-quality 3D renderings, supporting external camera views and first-person perspectives. The tool addresses trajectory interpolation and orientation smoothing to enable visually coherent motion from discrete data.
Significance. If the described functionality holds, sumo3Dviz offers a practical, accessible tool for researchers needing 3D traffic visualizations for human-centered studies. The open-source, pip-installable design and independence from proprietary software are strengths that promote reproducibility and broad adoption.
minor comments (2)
- The paper would be strengthened by the inclusion of example images or video frames demonstrating the 3D rendering output.
- Providing more details on the specific methods for trajectory interpolation and orientation smoothing in the main text, rather than relying solely on the linked repository, would improve accessibility.
Simulated Author's Rebuttal
We thank the referee for the positive summary of sumo3Dviz and for recognizing its practical value for human-centered traffic studies. We appreciate the recommendation for minor revision. No specific major comments were provided in the report, so we have no points requiring detailed rebuttal or manuscript changes at this stage.
Circularity Check
No significant circularity; tool-description paper is self-contained
full rationale
The manuscript introduces sumo3Dviz as a pip-installable Python pipeline that ingests standard SUMO trajectory and signal outputs and produces 3D renderings with external and first-person views. No equations, fitted parameters, predictions, or derivation chains appear in the provided text. The technical challenge of trajectory interpolation and orientation smoothing is presented as an implementation detail rather than a claim that reduces to its own inputs. The work is directly testable via the linked GitHub repository and contains no self-citation load-bearing arguments or uniqueness theorems. This is the expected outcome for a software artifact paper with no mathematical content.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Accessed: 2025-02-24
Ajuntament de Barcelona.Itineraris - Open Data Barcelona. Accessed: 2025-02-24. 2024. url:https://opendata-ajuntament.barcelona.cat/data/ca/dataset/itineraris
2025
-
[2]
Integrating SUMO in an urban digital twin-a case study from Munich
Sasan Amini et al. “Integrating SUMO in an urban digital twin-a case study from Munich”. In:SUMO User Conference 2023. 2023.doi:10.13140/rg.2.2.30752.15364
-
[3]
Michael Batty. “Digital twins”. In:Environment and Planning B: Urban Analytics and City Science45.5 (2018), pp. 817–820.doi:10.1177/2399808318796416
-
[4]
Traffic simulation with aimsun
Jordi Casas et al. “Traffic simulation with aimsun”. In:Fundamentals of traffic simulation. Springer, 2010, pp. 173–232.doi:10.1007/978-1-4419-6142-6_5
-
[5]
El espacio p´ ublico y la infraestructura viaria en La Ronda de Dalt
Sandra D´ ıaz. “El espacio p´ ublico y la infraestructura viaria en La Ronda de Dalt”. MA thesis. Universitat de Barcelona, 2015.url:https://hdl.handle.net/2445/66383
2015
-
[6]
CARLA: An open urban driving simulator
Alexey Dosovitskiy et al. “CARLA: An open urban driving simulator”. In:Conference on Robot Learning (CoRL). PMLR. 2017, pp. 1–16.url:https://proceedings.mlr.press/ v78/dosovitskiy17a.html
2017
-
[7]
Alexander Erath, Noopur Maheshwari, and Kay W. Axhausen. “Visualizing transport fu- tures: The potential of integrating procedural 3D modelling and traffic micro-simulation in virtual reality applications”. In:Proceedings of the 16th Swiss Transport Research Conference (STRC). Ascona, Switzerland, 2017.doi:10.3929/ethz-b-000118798
-
[8]
Jakob Erdmann. “SUMO’s lane-changing model”. In:Modeling Mobility with Open Data: 2nd SUMO Conference 2014 Berlin, Germany, May 15-16, 2014. Springer. 2015, pp. 105–123. doi:10.1007/978-3-319-15024-6_7
-
[9]
Virtual reality in stated preference survey for walkability as- sessment
Giovana Facchini et al. “Virtual reality in stated preference survey for walkability as- sessment”. In:Transportation Research Part D: Transport and Environment139 (2025), p. 104545.doi:10.1016/j.trd.2024.104545
-
[10]
Microscopic traffic flow simulator VISSIM
Martin Fellendorf and Peter Vortisch. “Microscopic traffic flow simulator VISSIM”. In:Fun- damentals of traffic simulation. Springer, 2010, pp. 63–93.doi:10.1007/978-1-4419-6142- 6_2
-
[11]
The principles of calibrating traffic microsimulation models
Yaron Hollander and Ronghui Liu. “The principles of calibrating traffic microsimulation models”. In:Transportation35.3 (2008), pp. 347–362.doi:10.1007/s11116-007-9156-2
-
[12]
Visualization in transportation: Current practice and future directions
Ronald Hughes. “Visualization in transportation: Current practice and future directions”. In:Transportation Research Record1899.1 (2004), pp. 167–174.doi:10.3141/1899-21
-
[13]
Real-time visualization of city public transport provider data and prediction of future trends
Kristijan Juri´ c. “Real-time visualization of city public transport provider data and prediction of future trends”. MA thesis. University of Zagreb. Faculty of Transport and Traffic Sciences, 2024.url:https://urn.nsk.hr/urn:nbn:hr:119:643618
2024
-
[14]
Visualization of Future Transport Concepts
Mattias J Klein and Henrik Lund. “Visualization of Future Transport Concepts”. MA thesis. Chalmers University of Technology, 2009.url:https://odr.chalmers.se/server/api/ core/bitstreams/43857f85-97e4-47e4-ac94-ddbd4c276c3b/content
2009
-
[15]
Recent development and applications of SUMO—Simulation of Urban MObility
Daniel Krajzewicz et al. “Recent development and applications of SUMO—Simulation of Urban MObility”. In:International Journal On Advances in Systems and Measurements5.3– 4 (2012), pp. 128–138.url:https://personales.upv.es/thinkmind/SysMea/SysMea_v5_ n34_2012/sysmea_v5_n34_2012_4.html
2012
-
[16]
Hani S Mahmassani. “50th anniversary invited article—Autonomous vehicles and connected vehicle systems: Flow and operations considerations”. In:Transportation Science50.4 (2016), pp. 1140–1162.doi:10.1287/trsc.2016.0712
-
[17]
SM Sohel Mahmud et al. “Micro-simulation modelling for traffic safety: A review and po- tential application to heterogeneous traffic environment”. In:IATSS Research43.1 (2019), pp. 27–36.doi:10.1016/j.iatssr.2018.07.002
-
[18]
An Open-Source Virtual Reality Traffic Co-Simulation for En- hanced Traffic Safety Assessment
Ahmad Mohammadi et al. “An Open-Source Virtual Reality Traffic Co-Simulation for En- hanced Traffic Safety Assessment”. In:Applied Sciences15.17 (2025), p. 9351.doi:10.3390/ app15179351. 13
2025
-
[19]
A Study of Reinforcement Learning Techniques for Path Tracking in Autonomous Vehicles
Ahmad Mohammadi et al. “Sumo2unity: An open-source traffic co-simulation tool to improve road safety”. In:2024 IEEE Intelligent Vehicles Symposium (IV). IEEE. 2024, pp. 2523–2528. doi:10.1109/IV55156.2024.10588571
-
[20]
Ishaan Paranjape et al. “A modular architecture for procedural generation of towns, inter- sections and scenarios for testing autonomous vehicles”. In:2020 IEEE Intelligent Vehicles Symposium (IV). IEEE. 2020, pp. 162–168.doi:10.1109/IV47402.2020.9304625
-
[21]
Mathias Pechinger and Johannes Lindner. “Sumonity: Bridging sumo and unity for enhanced traffic simulation experiences”. In:SUMO Conference Proceedings. Vol. 5. 2024, pp. 163–177. doi:10.52825/scp.v5i.1115
-
[22]
In: 2025 IEEE 64th Conference on Decision and Control (CDC)
Kevin Riehl et al. “EQ-ALINEA–Equitable Ramp Metering For Sustainable Metropolitan Highways”. In:2025 IEEE 64th Conference on Decision and Control (CDC). IEEE. 2025, pp. 4970–4975.doi:10.1109/CDC57313.2025.11312855
-
[23]
Usama Shahdah, Frank Saccomanno, and Bhagwant Persaud. “Application of traffic mi- crosimulation for evaluating safety performance of urban signalized intersections”. In:Trans- portation Research Part C: Emerging Technologies60 (2015), pp. 96–104.doi:10.1016/j. trc.2015.06.010
work page doi:10.1016/j 2015
-
[24]
The State of the Art in Visual Analytics for 3D Urban Data
Benedikt Weber et al. “The State of the Art in Visual Analytics for 3D Urban Data”. In: Computer Graphics Forum. Vol. 43. 3. 2024.doi:10.1111/cgf.15112
-
[25]
Joining SUMO and Unreal Engine to Create a Bespoke 360 Degree Narrow Passage Driving Simulator
Peter Youssef, Katherine Plant, and Ben Waterson. “Joining SUMO and Unreal Engine to Create a Bespoke 360 Degree Narrow Passage Driving Simulator”. In:SUMO Conference Proceedings. Vol. 5. 2024, pp. 93–112.doi:10.52825/scp.v5i.1104. 14
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.