Recognition: unknown
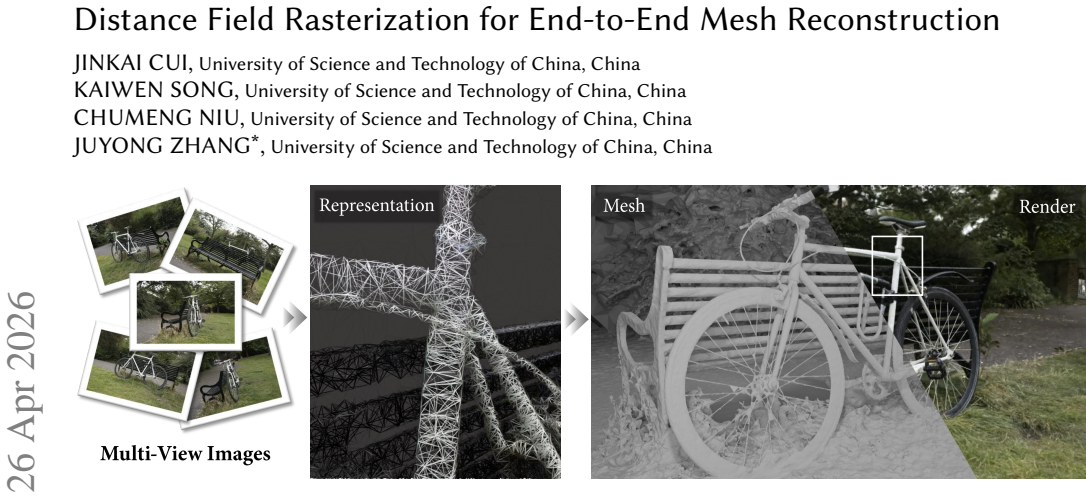
Distance Field Rasterization for End-to-End Mesh Reconstruction
Pith reviewed 2026-05-08 04:57 UTC · model grok-4.3
The pith
Optimizing a continuous signed distance field over a tetrahedral grid allows rasterization-based rendering and direct mesh extraction without post-processing.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
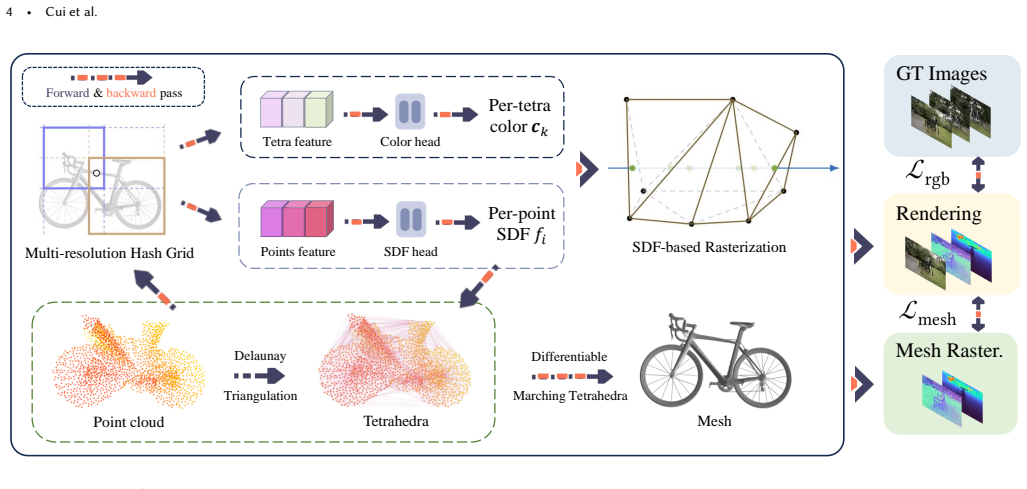
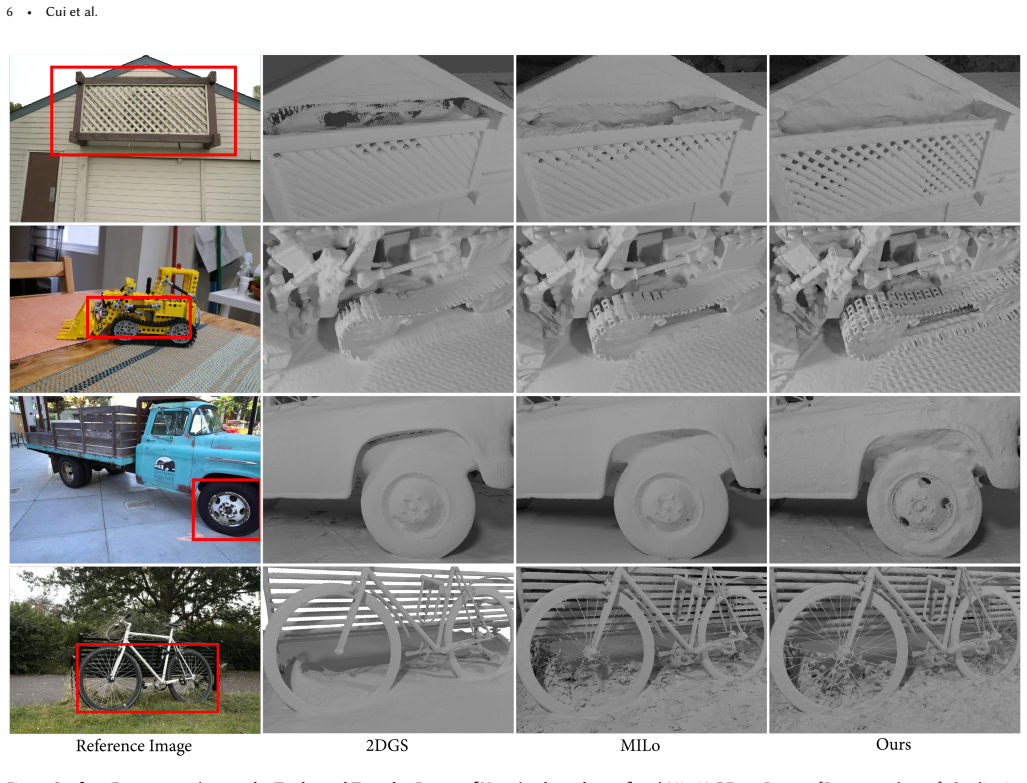
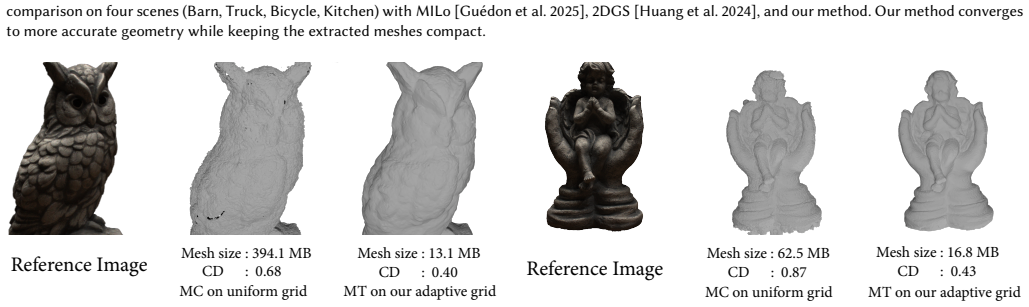
SDFRaster represents a scene as a continuous signed distance field defined over a fixed Delaunay tetrahedralization. The field is optimized by rasterizing tetrahedra and alpha-compositing their signed-distance contributions; differentiable Marching Tetrahedra is integrated so that surface meshes are extracted as part of the same differentiable pipeline. This yields end-to-end mesh reconstruction from images that avoids post-processing extraction and attains higher completeness and accuracy with reduced storage on DTU and Tanks and Temples datasets.
What carries the argument
SDFRaster: a continuous signed distance field over a Delaunay tetrahedral grid, rendered via tetrahedra rasterization and alpha-compositing and coupled to differentiable Marching Tetrahedra for direct surface extraction.
Load-bearing premise
A fixed Delaunay tetrahedralization plus continuous SDF optimization and differentiable Marching Tetrahedra produces globally consistent surfaces without grid artifacts or any need for heuristic post-processing.
What would settle it
If SDFRaster meshes extracted on the DTU dataset show lower F-score or visibly more holes than competing methods such as NeuS or VolSDF, the higher-quality and completeness claims are falsified.
Figures

read the original abstract
Rasterization based methods have recently enabled high-quality novel view synthesis at real-time rates, but their underlying volumetric primitives do not expose a direct, globally consistent surface representation, leaving sur face extraction to heuristic post-processing. In contrast, implicit signed dis tance field (SDF) methods provide well-defined surfaces but are typically optimized with computationally expensive ray marching. We propose SD FRaster, a rasterizable SDF representation that bridges this gap by combin ing the efficiency of rasterization with signed distance field for end-to-end mesh reconstruction. Starting from a Delaunay tetrahedralization, we op timize a continuous SDF over a tetrahedral grid and render it efficiently by rasterizing tetrahedra and alpha-compositing their contributions. We further integrate differentiable Marching Tetrahedra into the optimization loop, enablingend-to-endmeshreconstructionwithoutpost-processingmesh extraction. Experiments on DTU and Tanks and Temples demonstrate that SDFRaster achieves higher-quality and more complete surface reconstruc tions with lower storage cost than state-of-the-art approaches. Project page: https://ustc3dv.github.io/SDFRaster/
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes SDFRaster, a rasterizable signed distance field (SDF) representation for end-to-end mesh reconstruction. It begins with a fixed Delaunay tetrahedralization, optimizes a continuous SDF over the tetrahedral vertices, renders via tetrahedra rasterization and alpha compositing, and integrates differentiable Marching Tetrahedra to extract meshes directly during optimization without post-processing. Experiments on the DTU and Tanks and Temples datasets report higher-quality, more complete reconstructions with lower storage costs than state-of-the-art methods.
Significance. If the quantitative results hold under full verification, the approach offers a practical bridge between the speed of rasterization pipelines and the global consistency of implicit surfaces, potentially reducing heuristic post-processing in 3D reconstruction and enabling more efficient differentiable rendering for graphics applications. The explicit combination of established components (Delaunay tets, alpha compositing, diff. Marching Tetrahedra) without circular parameter fitting is a strength.
major comments (2)
- [Abstract] Abstract and method description (paragraph beginning 'Starting from a Delaunay tetrahedralization'): the central claim of 'more complete' reconstructions depends on the initial fixed tetrahedral grid being dense enough to support target topology; without adaptive refinement or topology-changing operations described, the zero level set remains constrained to existing tet faces and cannot fill large voids or introduce new connectivity, which is load-bearing for the Tanks and Temples results.
- [Experiments] Experiments section (DTU/Tanks and Temples claims): the superiority in quality and completeness is reported without ablations on initial tet density, grid resolution, or failure cases where the fixed Delaunay leaves gaps; this undermines verification that the end-to-end pipeline (not preprocessing) drives the gains.
minor comments (2)
- [Abstract] Abstract contains multiple typographical errors: 'dis tance' (should be 'distance'), 'sur face' (should be 'surface'), 'SD FRaster' (should be 'SDFRaster'), and 'enablingend-to-endmeshreconstruction' (missing spaces).
- [Abstract] The abstract states 'lower storage cost' but does not quantify the storage metric or compare it directly to baselines in the provided text; this should be clarified with explicit numbers or a table.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment below with clarifications and commit to revisions that strengthen the presentation of our method's assumptions and experimental validation.
read point-by-point responses
-
Referee: [Abstract] Abstract and method description (paragraph beginning 'Starting from a Delaunay tetrahedralization'): the central claim of 'more complete' reconstructions depends on the initial fixed tetrahedral grid being dense enough to support target topology; without adaptive refinement or topology-changing operations described, the zero level set remains constrained to existing tet faces and cannot fill large voids or introduce new connectivity, which is load-bearing for the Tanks and Temples results.
Authors: We agree that the completeness of reconstructions in SDFRaster is dependent on the initial Delaunay tetrahedral grid providing sufficient coverage and density to support the target topology. The grid is constructed once as a fixed preprocessing step from the input views and scene bounds to encompass the reconstruction volume, allowing the optimized continuous SDF and differentiable Marching Tetrahedra to extract surfaces at the zero level set within those tets. We do not claim adaptive refinement or dynamic topology changes. To address the concern, we will revise the abstract and method section to explicitly describe the grid construction process, state the assumption of sufficient initial density, and add a limitations discussion on cases where large voids or unsupported connectivity may not be recovered. revision: yes
-
Referee: [Experiments] Experiments section (DTU/Tanks and Temples claims): the superiority in quality and completeness is reported without ablations on initial tet density, grid resolution, or failure cases where the fixed Delaunay leaves gaps; this undermines verification that the end-to-end pipeline (not preprocessing) drives the gains.
Authors: We acknowledge that the current experiments do not include ablations on tetrahedral grid density or resolution, nor explicit failure cases for gaps in the fixed Delaunay grid. This limits the ability to fully isolate the contribution of the end-to-end SDF optimization and differentiable extraction from the preprocessing. In the revised manuscript, we will add these ablations (varying tet density and resolution) along with failure case examples to demonstrate the role of the differentiable pipeline in achieving higher quality and completeness. We will also clarify that the tetrahedralization is a non-learned, fixed preprocessing step, while the core optimization loop is end-to-end. revision: yes
Circularity Check
No significant circularity; derivation combines independent established components.
full rationale
The paper's core pipeline begins with a fixed Delaunay tetrahedralization, optimizes a continuous SDF on its vertices, rasterizes tetrahedra via alpha compositing, and closes the loop with differentiable Marching Tetrahedra for end-to-end extraction. None of these steps reduce by construction to fitted inputs, self-definitions, or load-bearing self-citations; each draws from prior independent literature on tetrahedral grids, SDFs, and differentiable isosurfacing. Empirical gains are reported on external benchmarks (DTU, Tanks and Temples) rather than being forced by the method's own parameterization. The approach therefore remains self-contained against external validation.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption A Delaunay tetrahedralization provides a suitable discretization for representing and optimizing a continuous signed distance field
- domain assumption Alpha-compositing of per-tetrahedron contributions accurately approximates the global SDF during rasterization
invented entities (1)
-
SDFRaster representation
no independent evidence
Reference graph
Works this paper leans on
-
[1]
TetWeave: Isosurface Extraction using On-The-Fly Delaunay Tetrahedral Grids for Gradient-Based Mesh Optimization. ACM Trans. Graph. 44, 4 (8 2025). doi:10.1145/3730851 SIGGRAPH 2025 issue. Jonathan T. Barron, Ben Mildenhall, Dor Verbin, Pratul P. Srinivasan, and Peter Hed- man. 2022. Mip-NeRF 360: Unbounded Anti-Aliased Neural Radiance Fields. In 2022 IEE...
-
[2]
ACM Transactions on Graphics (Proceedings of SIGGRAPH Asia) 41, 6 (2022)
Reconstructing Personalized Semantic Facial NeRF Models From Monocular Video. ACM Transactions on Graphics (Proceedings of SIGGRAPH Asia) 41, 6 (2022). doi:10.1145/3550454.3555501 Stephan J. Garbin, Marek Kowalski, Matthew Johnson, Jamie Shotton, and Julien Valentin. 2021. FastNeRF: High-Fidelity Neural Rendering at 200FPS. In 2021 IEEE/CVF International ...
-
[3]
Radiant Foam: Real-Time Differentiable Ray Tracing. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV) . 4135–4145. Amos Gropp, Lior Yariv, Niv Haim, Matan Atzmon, and Yaron Lipman. 2020. Implicit Geometric Regularization for Learning Shapes. In Proceedings of the 37th Interna- tional Conference on Machine Learning (Proceedi...
-
[4]
Vbench: Comprehensive benchmark suite for video generative models
Scaffold-GS: Structured 3D Gaussians for View-Adaptive Rendering. In 2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). IEEE, Seat- tle, W A, USA, 20654–20664. doi:10.1109/CVPR52733.2024.01952 Xiaoyang Lyu, Yang-Tian Sun, Yi-Hua Huang, Xiuzhe Wu, Ziyi Yang, Yilun Chen, Jiangmiao Pang, and Xiaojuan Qi. 2024. 3DGSR: Implicit Surface...
-
[5]
Sparse Voxels Rasterization: Real-time High-fidelity Radiance Field Render- ing. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recog- nition (CVPR). 16187–16196. Cheng Sun, Min Sun, and Hwann-Tzong Chen. 2022. Direct Voxel Grid Optimization: Super-fast Convergence for Radiance Fields Reconstruction. In 2022 IEEE/CVF Con- ference...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.