Recognition: unknown
Augmented reality system for visualising magnetic field topology and charged-particle trajectories in magnetic fusion plasmas
Pith reviewed 2026-05-07 14:28 UTC · model grok-4.3
The pith
A webcam and OpenCV system overlays real-time simulated particle trajectories on live views of magnetic fusion setups.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
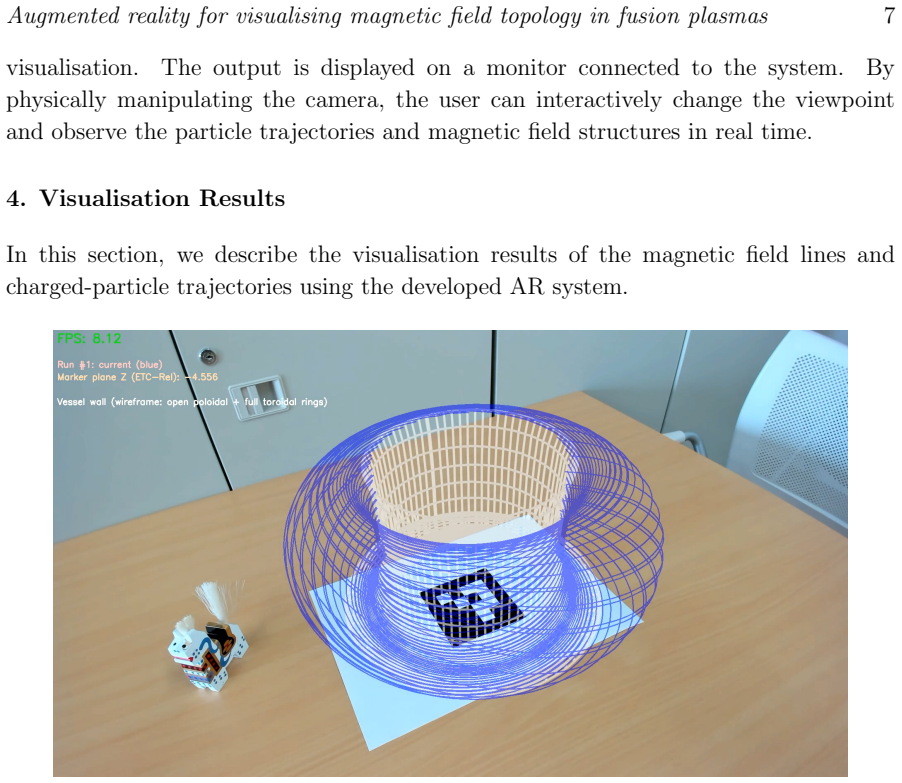
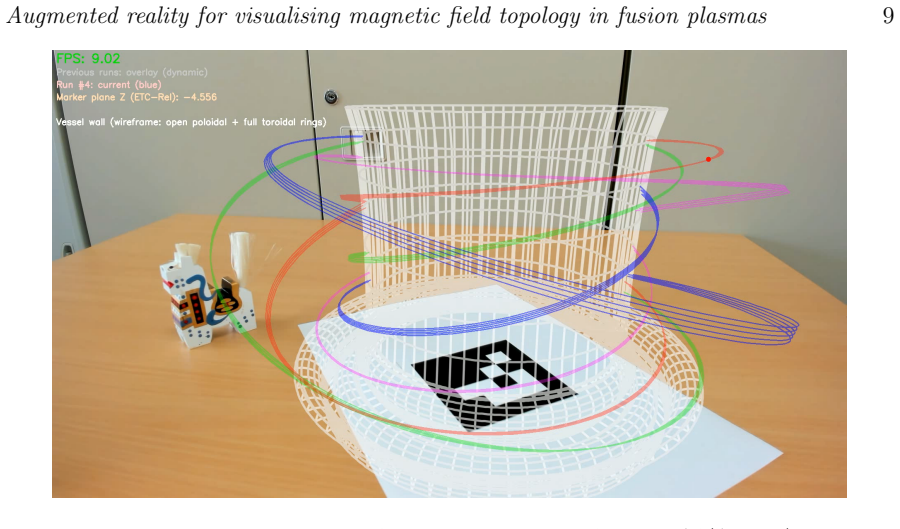
The central claim is that an orbit-following simulation can be integrated with a marker-based AR system using a web camera and the OpenCV library; by matching simulation time steps to camera frame rate, the resulting trajectories are continuously updated and drawn in real time on the live camera image, allowing interactive three-dimensional viewing of magnetic islands and other plasma structures.
What carries the argument
The marker-based AR framework synchronized to camera frame rate that superimposes simulation trajectories onto the live image.
If this is right
- Moving the web camera lets observers inspect magnetic islands and field lines from arbitrary positions and angles.
- The same visualization appears on a shared display so multiple people can reason together from identical visual data.
- The method lowers cognitive load for understanding high-dimensional spatial structures in magnetic confinement.
- Researchers and students from varied backgrounds in physics and engineering gain a common visual reference for discussion.
Where Pith is reading between the lines
- Streaming the camera feed could support remote participants in seeing and discussing the same live AR view.
- Adding controls to pause or rescale the simulation inside the AR view would let users explore specific orbit classes on demand.
- The same marker-plus-camera approach could be tested with other plasma simulation codes to check whether the real-time overlay generalizes.
Load-bearing premise
Marker detection stays accurate and the simulation computation keeps pace with typical webcam frame rates without lag or visual glitches under ordinary lab lighting and camera motion.
What would settle it
Move the camera at normal speed under typical lab lighting and check whether the overlaid particle paths remain smoothly aligned with the image or show visible lag, jitter, or loss of marker tracking.
Figures





read the original abstract
A cost-effective augmented reality (AR) system is presented for visualising three-dimensional magnetic field structures and charged-particle trajectories in magnetically confined fusion plasmas. The system presented in this study integrates an orbit-following simulation code with a marker-based AR framework using a web camera and the OpenCV library. By synchronizing the time step of the simulation with the frame rate of the camera, the trajectories are continuously updated and superimposed in real time onto the camera image. Through the interactive operation of manipulating the web camera, users can observe three-dimensional structures, such as magnetic islands, from various positions and viewing angles. Simultaneously, the visualisation results can be shared by multiple people through a display. Such a shared AR environment supports an intuitive understanding of three-dimensional spatial structures that involve a high cognitive load. It also enables collaborative reasoning based on common visual information in research on magnetic confinement fusion, where researchers and students have diverse backgrounds in physics, engineering, and related fields.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper describes a cost-effective augmented reality (AR) system for visualizing three-dimensional magnetic field structures and charged-particle trajectories in magnetically confined fusion plasmas. It integrates an existing orbit-following simulation code with a marker-based AR framework that uses a web camera and the OpenCV library; by synchronizing the simulation timestep with the camera frame rate, trajectories are updated and overlaid in real time on the live camera image. Users can interactively manipulate the camera to view structures such as magnetic islands from multiple angles, with results shareable via a display for collaborative viewing.
Significance. If the real-time performance claim holds under typical lab conditions, the system provides a practical, low-cost tool for reducing the cognitive load of interpreting complex 3D topologies in fusion research. It leverages standard, well-established components (orbit-following code, OpenCV marker tracking, and frame-rate synchronization) without introducing new physics or algorithms, making the demonstration reproducible and potentially valuable for education and cross-disciplinary collaboration among physicists, engineers, and students.
major comments (1)
- [Implementation section describing synchronization and AR framework] The real-time visualization claim depends on successful synchronization of the orbit code timestep with webcam frame rate and reliable marker detection, yet the manuscript provides no quantitative benchmarks (measured frame rates, latency, detection accuracy, or tests under varying lighting/movement). This performance data is load-bearing for substantiating practicality and should be added with error analysis.
minor comments (2)
- [Abstract] The abstract refers to sharing the visualization 'through a display' but does not detail the technical mechanism (e.g., network streaming or multi-user setup), leaving the collaborative aspect underspecified.
- [Methods/Implementation] No version number or citation is given for the OpenCV library or the specific orbit-following code used, which would aid reproducibility.
Simulated Author's Rebuttal
We thank the referee for their positive assessment of the work and the recommendation for minor revision. The single major comment is addressed point-by-point below, and the manuscript has been revised accordingly.
read point-by-point responses
-
Referee: [Implementation section describing synchronization and AR framework] The real-time visualization claim depends on successful synchronization of the orbit code timestep with webcam frame rate and reliable marker detection, yet the manuscript provides no quantitative benchmarks (measured frame rates, latency, detection accuracy, or tests under varying lighting/movement). This performance data is load-bearing for substantiating practicality and should be added with error analysis.
Authors: We agree that quantitative benchmarks are necessary to substantiate the real-time performance of the AR system. The manuscript describes the synchronization approach, in which the orbit-following code advances its timestep in direct correspondence with each frame acquired by the webcam via OpenCV marker tracking, but does not report measured performance metrics. In the revised manuscript we have added a new subsection to the Implementation section that supplies the requested data: measured frame rates under standard operating conditions, end-to-end latency between simulation update and visual overlay, marker-detection accuracy across repeated trials, and results from controlled tests that vary lighting intensity and camera motion speed. The added material includes an error analysis with standard deviations and a brief discussion of the conditions under which the reported performance holds. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper is a descriptive engineering demonstration of an AR visualization system that integrates an existing orbit-following simulation code with marker-based AR (webcam + OpenCV) via real-time timestep synchronization. No derivations, equations, fitted parameters, predictions, or self-referential claims appear in the abstract or system description. The work contains no load-bearing steps that reduce to inputs by construction, no uniqueness theorems, and no ansatzes or renamings of known results. It is fully self-contained as a practical implementation report with no internal circular reasoning.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption OpenCV marker detection and pose estimation function reliably under typical indoor lighting and camera motion
Reference graph
Works this paper leans on
-
[1]
Fusionin press https://doi.org/10.1088/1741-4326/ae4d5c
Barabaschi Pet al Nucl. Fusionin press https://doi.org/10.1088/1741-4326/ae4d5c
-
[2]
Fluids1265
Kruskal M D and Kulsrud R M 1958Phys. Fluids1265
-
[3]
Hazeltine R D and Meiss J D 1992Plasma Confinement(Addison-Wesley Publishing Company)
-
[4]
Wesson J 2011Tokamaks(Oxford University Press)
-
[5]
Wakatani M 1998Stellarator and Heliotron Devices(Oxford University Press)
-
[6]
Plasma Phys.81205810501
Taylor J B and Newton S L 2015J. Plasma Phys.81205810501
-
[7]
Utkarsh A 2015The ParaView Guide: A Parallel Visualisation Application(Kitware)
-
[8]
Azuma R T 1997Presence: Teleoperators and Virtual Environments6355
-
[9]
Dobb’s Journal: Software Tools for the Professional Programer vol 25 p 120
Bradski G 2000 The OpenCV library Dr. Dobb’s Journal: Software Tools for the Professional Programer vol 25 p 120
2000
-
[10]
Fluids10137
Grad H 1967Phys. Fluids10137
-
[11]
D’haeseleer W Det al1991Flux Coordinates and Magnetic Field Structure - A Guide to a Fundamental Tool of Plasma Theory(Springer-Verlag)
-
[12]
Rep.52263
Chirikov B V 1979Phys. Rep.52263
-
[13]
Greene J M 1979J. Math. Phys.201183
-
[14]
Northrop T G 1963The Adiabatic Motion of Charged Particles(Wiley)
-
[15]
Cary J R and Brizard A J 2009Rev. Mod. Phys.81693
-
[16]
Fusion54123007
Matsuyama Aet al2014Nucl. Fusion54123007
-
[17]
Garrido-Jurado Set al2014Pattern Recognition472280 Augmented reality for visualising magnetic field topology in fusion plasmas13
-
[18]
on visualisation and Comput
Marchand E, Uchiyama H and Spindler F 2016IEEE Trans. on visualisation and Comput. Graphics 222633
-
[19]
Forsyth D A and Ponce J 2002Computer Vision: A Modern Approach(Pearson)
-
[20]
Biskamp D 2009Nonlinear Magnetohydrodynamics(Cambridge University Press)
-
[21]
(Springer)
Lichtenberg A J and Lieberman 1992Regular and Chaotic Dynamics2nd ed. (Springer)
-
[22]
Stix T H 1972Plasma Phys.14367
-
[23]
Vidak Aet al2024Eur. J. Phys.45023002
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.