Recognition: unknown
Propulsion and far-field hydrodynamics of linked-sphere microswimmers with viscoelastic deformability
Pith reviewed 2026-05-07 08:59 UTC · model grok-4.3
The pith
Linked-sphere microswimmers with viscoelastic bodies propel under reciprocal actuation, with optimal or reversing frequencies depending on sphere count and actuator placement.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
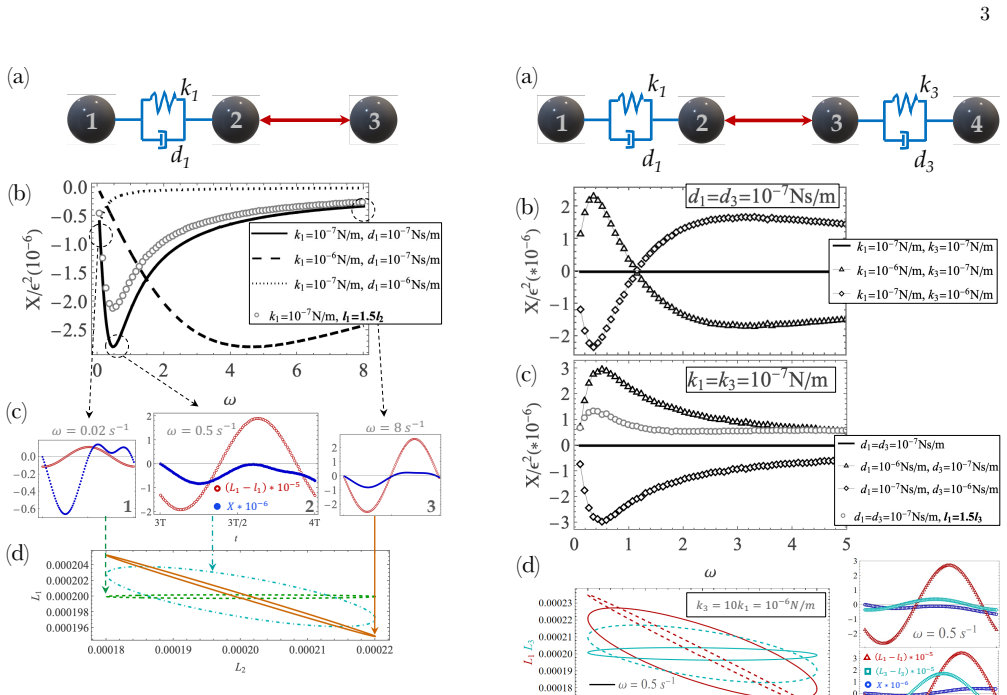
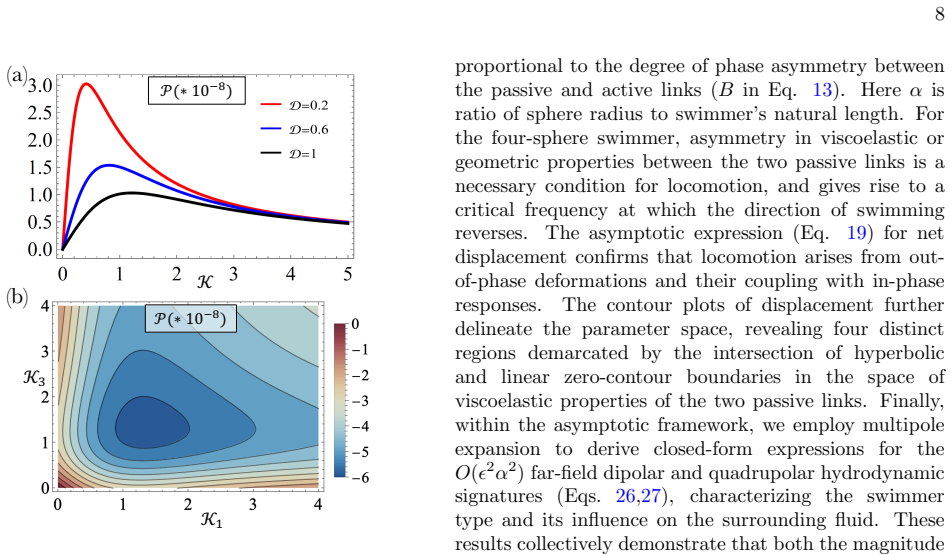
Adopting Kelvin-Voigt deformability for the passive body, the three-sphere swimmer possesses an optimal actuation frequency for locomotion, while the four-sphere swimmer exhibits a critical frequency at which the locomotion direction reverses. The far-field hydrodynamic signature is characterized by dominant dipolar and quadrupolar contributions whose magnitudes are sensitive to the relative length of the actuator segment.
What carries the argument
Linked-sphere swimmer designs (3-sphere end-actuated and 4-sphere mid-actuated) incorporating Kelvin-Voigt viscoelasticity in the passive segments, which introduces a phase lag between actuation and deformation that enables net propulsion despite reciprocal driving.
If this is right
- The three-sphere swimmer's speed can be maximized by tuning the actuation frequency to match the viscoelastic relaxation time.
- The four-sphere swimmer can be made to swim in either direction by choosing frequency above or below the critical value.
- Far-field interactions between multiple such swimmers are dominated by dipole and quadrupole terms that vary with actuator length ratio.
- These kinematic and hydrodynamic features provide design principles for microswimmers operating in viscoelastic media.
Where Pith is reading between the lines
- The frequency-dependent reversal could allow selective navigation in fluids with different viscoelastic properties without changing the actuation mechanism.
- Similar effects might appear in other microswimmer geometries if viscoelasticity is included, suggesting a general route to non-reciprocal motion from reciprocal drives.
- Testing in real biological fluids like mucus would reveal if the Kelvin-Voigt approximation holds or if more complex rheology alters the critical frequencies.
Load-bearing premise
The passive body is assumed to exhibit viscoelastic deformability that can be modeled by the Kelvin-Voigt constitutive relation, and the actuation is taken to be purely reciprocal with no additional non-reciprocal effects from the fluid or geometry.
What would settle it
An experiment measuring the swimming velocity of a fabricated four-sphere linked microswimmer with known Kelvin-Voigt parameters as a function of actuation frequency, which fails to show a direction reversal at the predicted critical frequency, would falsify the kinematic claim.
Figures



read the original abstract
Viscoelasticity governs the locomotion strategies of deformable microorganisms, rendering it a fundamental mechanical property of microbial motility and an integral component in the design of envisioned microbots. Recent studies have shown that it can enable effective propulsion through non-reciprocal body deformations, even under time-reversible actuation. In this work, we investigate the dynamics of model microswimmers driven by reciprocal actuation, wherein the passive body exhibits viscoelastic deformability. We consider two linked-sphere designs, distinguished by the location of actuation: applied at one end (3-sphere design) or at the midpoint of the swimmer body (4-sphere design). Adopting Kelvin-Voigt deformability, we characterize the kinematic performance of both designs: the three-sphere swimmer possesses an optimal actuation frequency, while the four-sphere swimmer exhibits a critical frequency at which the locomotion direction reverses. We examine the swimmer's far-field hydrodynamic signature and find that resulting flow field is characterized by dominant dipolar and quadrupolar contributions, whose magnitudes are sensitive to the relative length of the actuator segment.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript models the propulsion of two linked-sphere microswimmer designs in which the connecting links obey a Kelvin-Voigt viscoelastic constitutive relation and are driven by purely reciprocal actuation. For the three-sphere geometry (actuation at one end) an optimal actuation frequency is reported; for the four-sphere geometry (actuation at the midpoint) a critical frequency is identified at which the swimming direction reverses. The far-field flow is decomposed into multipoles and shown to be dominated by dipolar and quadrupolar terms whose relative strengths depend on the normalized length of the actuated segment.
Significance. If the numerical solutions are accurate, the work supplies concrete, frequency-dependent kinematic predictions and a leading-order hydrodynamic signature that can be tested experimentally in viscoelastic fluids. The demonstration that reciprocal actuation plus linear viscoelasticity is sufficient to produce net propulsion and direction reversal adds a useful limiting case to the literature on low-Re locomotion.
minor comments (3)
- [Abstract] The abstract and introduction should state the dimensionless groups (e.g., Deborah number, viscosity ratio) and the range of geometric aspect ratios explored so that the reported optimal and critical frequencies can be placed in context.
- Figure captions and legends must explicitly label which curves correspond to the three-sphere versus four-sphere designs and which actuation frequencies are shown; several panels currently lack this information.
- The far-field multipole coefficients are stated to be sensitive to actuator length; a brief table or plot of the dipole and quadrupole amplitudes versus normalized actuator length would make this dependence quantitative and easier to compare with future experiments.
Simulated Author's Rebuttal
We thank the referee for their positive assessment of our manuscript and for recommending minor revision. The referee's summary accurately captures the main results on frequency-dependent propulsion for the 3-sphere and 4-sphere designs and the actuator-length dependence of the far-field multipoles.
Circularity Check
No significant circularity; derivation follows directly from constitutive model and hydrodynamics
full rationale
The paper solves the linear Stokes hydrodynamics coupled to Kelvin-Voigt viscoelastic links under purely reciprocal actuation for the two linked-sphere geometries. The reported optimal frequency for the 3-sphere design and the reversal frequency for the 4-sphere design are obtained by direct integration of the resulting ODE system; they are not fitted parameters renamed as predictions nor defined in terms of the output quantities. The far-field dipolar and quadrupolar coefficients likewise follow from the standard multipole expansion of the force-free flow without additional ansatzes or self-citations that would collapse the result to its inputs. The modeling assumptions (Kelvin-Voigt constitutive law, reciprocal actuation) are stated explicitly and do not presuppose the kinematic outcomes.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Kelvin-Voigt model accurately captures the viscoelastic deformability of the passive body
- standard math Low-Reynolds-number Stokes flow governs the hydrodynamics
Reference graph
Works this paper leans on
-
[1]
Purcell, Life at low reynolds number, American Jour- nal of Physics45(1977)
E. Purcell, Life at low reynolds number, American Jour- nal of Physics45(1977)
1977
-
[2]
Najafi and R
A. Najafi and R. Golestanian, Simple swimmer at low reynolds number: Three linked spheres, Physical Review E69, 062901 (2004)
2004
-
[3]
Golestanian and A
R. Golestanian and A. Ajdari, Analytic results for the three-sphere swimmer at low reynolds number, Physical Review E77, 036308 (2008)
2008
-
[4]
Nasouri, A
B. Nasouri, A. Vilfan, and R. Golestanian, Efficiency lim- its of the three-sphere swimmer, Physical Review Fluids 4, 073101 (2019)
2019
-
[5]
Pooley, G
C. Pooley, G. Alexander, and J. Yeomans, Hydrodynamic interaction between two swimmers at low reynolds num- ber, Physical review letters99, 228103 (2007)
2007
-
[6]
Alexander, C
G. Alexander, C. Pooley, and J. Yeomans, Hydrodynam- ics of linked sphere model swimmers, Journal of Physics: Condensed Matter21, 204108 (2009)
2009
-
[7]
Yasuda, Y
K. Yasuda, Y. Hosaka, and S. Komura, Generalized three-sphere microswimmers, Journal of the Physical So- ciety of Japan92, 121008 (2023)
2023
-
[8]
Lauga, Life around the scallop theorem, Soft Matter 7, 3060 (2011)
E. Lauga, Life around the scallop theorem, Soft Matter 7, 3060 (2011)
2011
-
[9]
Klotsa, K
D. Klotsa, K. A. Baldwin, R. J. Hill, R. M. Bowley, and M. R. Swift, Propulsion of a two-sphere swimmer, Phys- ical review letters115, 248102 (2015)
2015
-
[10]
C. Datt, B. Nasouri, and G. J. Elfring, Two-sphere swim- mers in viscoelastic fluids, Physical Review Fluids3, 123301 (2018)
2018
-
[11]
Yasuda, M
K. Yasuda, M. Kuroda, and S. Komura, Reciprocal mi- croswimmers in a viscoelastic fluid, Physics of Fluids32 (2020)
2020
-
[12]
Eberhard, A
M. Eberhard, A. Choudhary, and H. Stark, Why the re- ciprocal two-sphere swimmer moves in a viscoelastic en- vironment, Physics of Fluids35(2023)
2023
-
[13]
Yasuda, R
K. Yasuda, R. Okamoto, and S. Komura, A three-sphere microswimmer in a structured fluid, Europhysics Letters 123, 34002 (2018)
2018
-
[14]
J. E. Avron, O. Kenneth, and D. H. Oaknin, Pushmepul- lyou: an efficient micro-swimmer, New Journal of Physics 7, 234 (2005)
2005
-
[15]
Silverberg, E
O. Silverberg, E. Demir, G. Mishler, B. Hosoume, N. Trivedi, C. Tisch, D. Plascencia, O. S. Pak, and I. E. Araci, Realization of a push-me-pull-you swimmer at low reynolds numbers, Bioinspiration & Biomimetics 15, 064001 (2020)
2020
-
[16]
Nasouri, A
B. Nasouri, A. Khot, and G. J. Elfring, Elastic two-sphere swimmer in stokes flow, Physical Review Fluids2, 043101 (2017)
2017
-
[17]
Montino and A
A. Montino and A. DeSimone, Three-sphere low- reynolds-number swimmer with a passive elastic arm, The European Physical Journal E38, 42 (2015)
2015
-
[18]
Montino and A
A. Montino and A. DeSimone, Dynamics and optimal ac- tuation of a three-sphere low-reynolds-number swimmer with muscle-like arms, Acta Applicandae Mathematicae 149, 53 (2017)
2017
-
[19]
F. Alouges, A. Lefebvre-Lepot, and J. Levillain, A lim- iting model for a low reynolds number swimmer with n passive elastic arms, arXiv preprint arXiv:2303.00367 (2023)
-
[20]
Levillain, F
J. Levillain, F. Alouges, A. DeSimone, A. Choud- hary, S. Nambiar, and I. Bochert, A bi-directional low- reynolds-number swimmer with passive elastic arms, ESAIM: Proceedings and Surveys79, 58 (2025)
2025
-
[21]
S. E. Spagnolie and E. Lauga, The optimal elastic flagel- lum, Physics of Fluids22(2010)
2010
-
[22]
Espinosa-Garcia, E
J. Espinosa-Garcia, E. Lauga, and R. Zenit, Fluid elastic- ity increases the locomotion of flexible swimmers, Physics of Fluids25(2013)
2013
-
[23]
Thomases and R
B. Thomases and R. D. Guy, The role of body flexibil- ity in stroke enhancements for finite-length undulatory swimmers in viscoelastic fluids, Journal of Fluid Mechan- ics825, 109 (2017)
2017
-
[24]
J. Liu, Y. Fu, Y. Wu, and H. Ruan, Propulsion mech- anism of artificial flagellated micro-swimmers actuated by acoustic waves—theory and experimental verification, Bioinspiration & Biomimetics19, 056008 (2024)
2024
-
[25]
Batchelor, Brownian diffusion of particles with hy- drodynamic interaction, Journal of Fluid Mechanics74, 1 (1976)
G. Batchelor, Brownian diffusion of particles with hy- drodynamic interaction, Journal of Fluid Mechanics74, 1 (1976)
1976
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.