Array Zooming Optimization for Near-Field Localization With Movable Antennas
Pith reviewed 2026-05-07 08:34 UTC · model grok-4.3
The pith
Movable-antenna array zooming fuses multiple measurements to suppress aliasing and outperform fixed arrays in near-field localization accuracy.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The AZ system dynamically adjusts antenna spacings in multiple measurements, fuses the information to mitigate spatial aliasing while preserving resolution, analyzes the false peak distribution to obtain a tighter bound including false detection probability, and optimizes the configuration to suppress false peaks, thereby achieving lower localization error than fixed-spacing arrays or CRB-based AZ under varying SNRs.
What carries the argument
The multi-measurement array zooming system with movable antennas that reconfigures spacings and fuses observations to balance resolution and ambiguity.
Load-bearing premise
That the fusion of measurements from different spacings eliminates aliasing without introducing additional errors due to movement or imperfect calibration, and that the false-peak model holds for real likelihood functions.
What would settle it
An experiment that measures localization error and false peak occurrence for the optimized AZ configurations versus fixed arrays in a controlled near-field setup with known source positions and varying SNRs, checking if the improvement matches the claimed margin.
Figures






read the original abstract
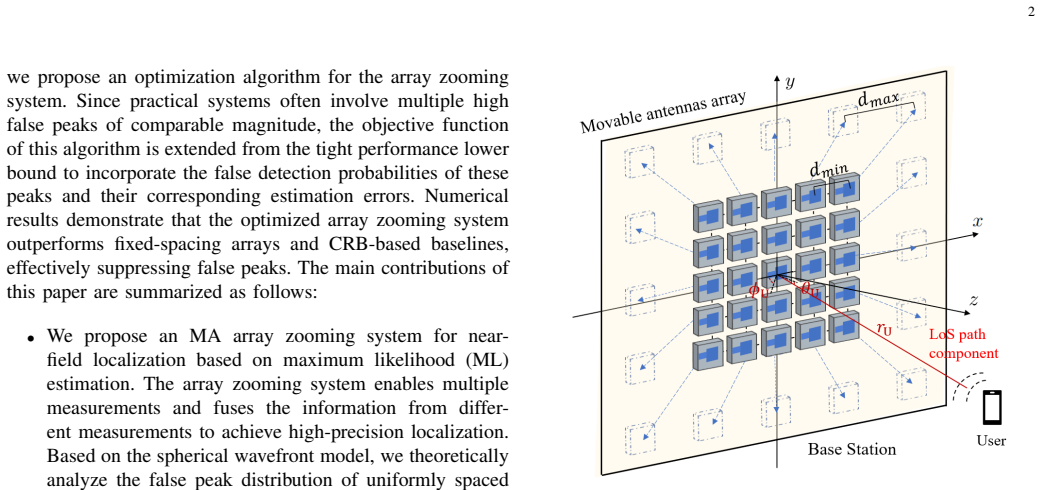
The emergence of movable antenna (MA) technology provides a promising way to enhance wireless sensing and communication by introducing spatial degrees of freedom through dynamic array reconfiguration. In near-field localization, achieving high resolution at low cost necessitates the adoption of sparse arrays. However, such sparsity tends to introduce spatial ambiguity due to aliasing effects. To resolve this resolution-ambiguity dilemma, this paper proposes an MA-enabled array zooming (AZ) system. First, we design a multi-measurement array zooming system that dynamically adjusts antenna spacings. By fusing the observational information from different measurements, the proposed AZ system effectively mitigates spatial aliasing while maintaining spatial resolution. Second, to quantify the performance limits under the severe multi-modal distributions inherent in sparse near-field sensing, we theoretically analyze the false peak distribution and derive a tighter performance lower bound, which incorporates the false detection probability. Third, considering that multiple false peaks may exist in practical multi-modal distributions, we propose an optimization algorithm for the AZ system to suppress false peaks and minimize the localization error. Extensive numerical results demonstrate that the proposed AZ strategy adaptively optimizes array configurations under varying signal-to-noise ratios (SNRs), substantially outperforming both conventional fixed-spacing arrays and Cramer-Rao bound (CRB)-based AZ benchmarks in localization accuracy.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes an array zooming (AZ) optimization framework for near-field localization using movable antennas (MAs). The core idea is to dynamically adjust antenna spacings across multiple measurements and fuse the observations to resolve spatial aliasing while preserving high resolution in sparse arrays. The authors first model the multi-measurement AZ system, then theoretically derive the distribution of false peaks in the multi-modal likelihood function and obtain a tighter lower bound on localization error that accounts for false detection probability. Building on this, they develop an optimization algorithm to select array configurations that minimize the expected localization error under different SNR regimes. Numerical results are presented to show that the proposed strategy achieves better accuracy than fixed-spacing arrays and CRB-optimized AZ baselines.
Significance. If the theoretical derivations and numerical claims hold under the stated assumptions, this work makes a meaningful contribution to MA-enabled wireless sensing by addressing the fundamental resolution-ambiguity trade-off in near-field scenarios. The analysis of false-peak distributions and the incorporation into a performance bound is a solid theoretical step beyond standard CRB, which often ignores multi-modality. The optimization algorithm provides a practical way to adapt the array, and the reported gains in simulations suggest potential for improved localization in low-SNR or sparse setups. Credit is due for the first-principles derivation rather than empirical fitting. However, the practical significance depends on how well the ideal fusion model translates to hardware implementations.
major comments (2)
- [Section III-B, Eq. (14)] Section III-B, Eq. (14): the tighter lower bound is derived by integrating over the false peak distribution under the assumption of ideal observation fusion across measurements. However, the system model in Section II does not incorporate any phase perturbation terms due to MA movement inaccuracies or calibration errors. This omission is load-bearing because the central claim of reliable aliasing mitigation relies on perfect fusion; without it, the bound may not hold in practice and the performance gains could be overstated.
- [Section V, Algorithm 1] Section V, Algorithm 1: the AZ optimization algorithm minimizes the localization error metric derived from the ideal multi-modal analysis. It does not include robustness to movement-induced errors or constraints on the number of reconfigurations. This is a major concern for the claim in the abstract that the strategy substantially outperforms benchmarks, as the numerical results in Section VI use the same ideal simulation setup without added jitter.
minor comments (3)
- [Figure 2] Figure 2: the caption for the array configuration diagram should explicitly state the range of adjustable spacings to clarify the degrees of freedom in the AZ system.
- [Eq. (7)] Eq. (7): the definition of the fused likelihood function uses inconsistent notation for the noise variance across different measurements; please standardize.
- A few typos in the introduction, e.g., 'movable antenna' is abbreviated as MA but sometimes written out inconsistently.
Simulated Author's Rebuttal
We sincerely thank the referee for the thorough review and insightful comments on our manuscript. The feedback highlights important aspects regarding the modeling assumptions and practical considerations in our array zooming optimization framework. We address each major comment below and outline the revisions we plan to make to strengthen the paper.
read point-by-point responses
-
Referee: [Section III-B, Eq. (14)] Section III-B, Eq. (14): the tighter lower bound is derived by integrating over the false peak distribution under the assumption of ideal observation fusion across measurements. However, the system model in Section II does not incorporate any phase perturbation terms due to MA movement inaccuracies or calibration errors. This omission is load-bearing because the central claim of reliable aliasing mitigation relies on perfect fusion; without it, the bound may not hold in practice and the performance gains could be overstated.
Authors: We thank the referee for pointing out this important modeling assumption. The system model presented in Section II assumes ideal antenna positioning and perfect fusion of multi-measurement observations, which allows us to derive the false peak distribution and the tighter lower bound in Section III-B. This is a deliberate choice to establish the fundamental performance limits of the AZ framework under perfect conditions, similar to many theoretical analyses in the MA literature. We agree that practical phase perturbations due to movement inaccuracies or calibration errors could affect the fusion reliability. In the revised manuscript, we will add a paragraph in Section II and the discussion section to explicitly state this assumption and its implications for the bound's applicability. We will also suggest extensions for robust designs under imperfect positioning. This constitutes a partial revision as we clarify rather than alter the core derivations. revision: partial
-
Referee: [Section V, Algorithm 1] Section V, Algorithm 1: the AZ optimization algorithm minimizes the localization error metric derived from the ideal multi-modal analysis. It does not include robustness to movement-induced errors or constraints on the number of reconfigurations. This is a major concern for the claim in the abstract that the strategy substantially outperforms benchmarks, as the numerical results in Section VI use the same ideal simulation setup without added jitter.
Authors: The optimization algorithm in Section V is formulated to minimize the expected localization error using the derived bound under the ideal multi-measurement model, without additional constraints on reconfigurations or robustness terms, to focus on the core optimization problem. The numerical results in Section VI are generated under the same ideal assumptions to validate the theoretical claims. We acknowledge that this limits the direct applicability to hardware with jitter. To address the concern, we will include in the revision: (1) a discussion on the number of reconfigurations as a practical constraint, and (2) additional simulation results with added position jitter to evaluate performance degradation. If space permits, we may propose a modified algorithm with a robustness penalty term. This is a partial revision, as the main algorithm remains focused on the ideal case but with added analysis. revision: partial
Circularity Check
No significant circularity; derivation from first-principles observation model
full rationale
The paper derives the false-peak distribution analysis and tighter performance lower bound directly from the multi-measurement observation model under the AZ system. The optimization algorithm is then proposed to minimize localization error based on that analysis. No steps reduce by construction to fitted inputs, self-definitions, or load-bearing self-citations. The CRB benchmark is external, and numerical validation uses simulation to demonstrate gains rather than define the claims. This is a self-contained theoretical contribution with independent content.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Near-field spherical-wave propagation model holds for the distances and frequencies considered.
- domain assumption Antenna movements between measurements are instantaneous and perfectly calibrated with no additional phase noise.
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.