Recognition: unknown
P2M++: Enhanced Solver for Point-to-Mesh Distance Queries
Pith reviewed 2026-05-09 15:23 UTC · model grok-4.3
The pith
P2M++ speeds up point-to-mesh distance queries by adding auxiliary sites and converting interference detection to sphere-triangle tests.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
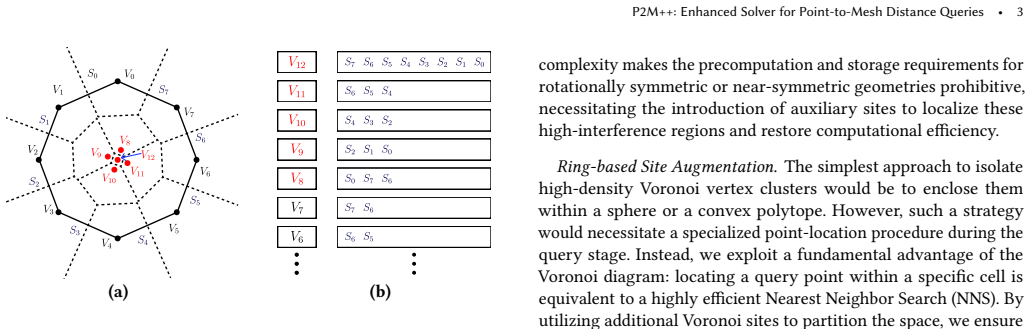
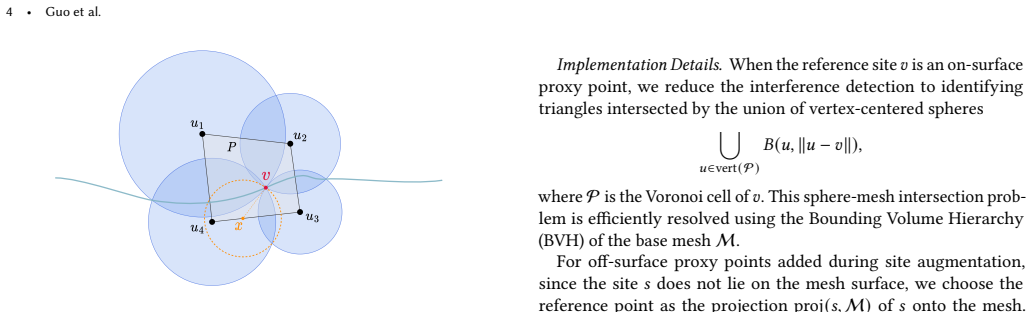
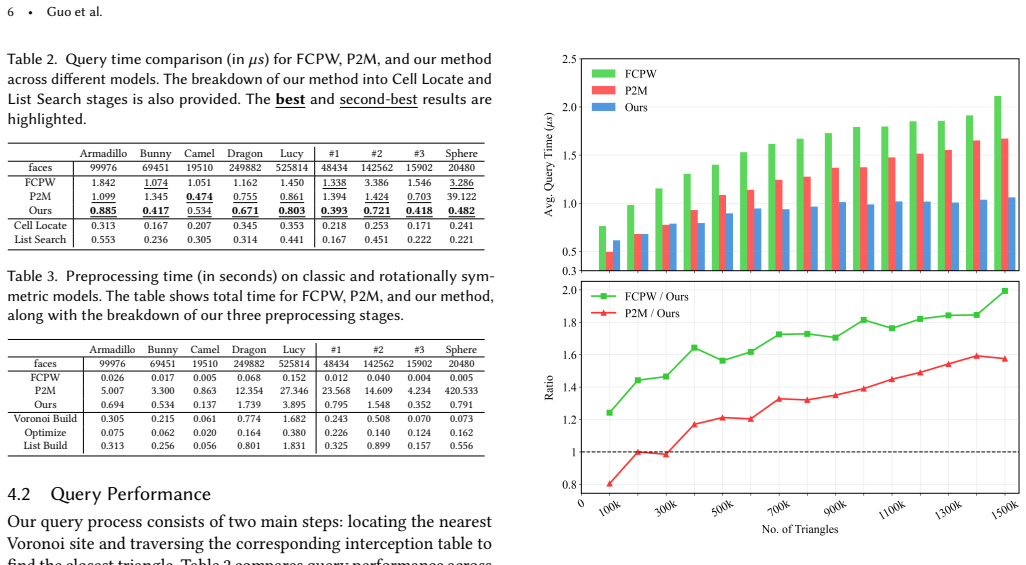
P2M++ augments mesh vertices adaptively with auxiliary sites in high Voronoi-vertex-density regions to localize interference, reformulates interference detection as sphere-triangle collision tests solved via the base mesh BVH, and replaces kd-tree search with recursive dynamic programming; these steps yield 3x-10x faster preprocessing and 1.5x faster queries than P2M, with pronounced gains on rotationally symmetric geometries.
What carries the argument
Adaptive augmentation of vertices with auxiliary sites together with reformulation of interference detection as sphere-triangle collision tests resolved by the mesh BVH.
If this is right
- Preprocessing time drops by factors of three to ten compared with the original P2M.
- Query speed rises by a factor of 1.5, with larger relative gains on symmetric inputs.
- Voronoi-based localization remains intact while the preparation bottleneck shrinks.
- The same mesh BVH already built for rendering can now serve the distance solver without extra construction cost.
Where Pith is reading between the lines
- The auxiliary-site idea may transfer to other Voronoi-heavy tasks such as medial-axis extraction or offset-surface computation.
- Lower setup cost could make these queries practical inside interactive modeling loops or real-time collision avoidance.
- The sphere-triangle reformulation hints at similar simplifications for related proximity queries that currently rely on full Voronoi diagrams.
Load-bearing premise
The added auxiliary sites and sphere-triangle collision tests locate every interference correctly and introduce no new errors.
What would settle it
Run both P2M and P2M++ on a rotationally symmetric mesh such as a cylinder or cone and compare the reported point-to-mesh distances against each other and against an exact brute-force computation; any mismatch falsifies the claim.
Figures





read the original abstract
Point-to-mesh distance queries are fundamental in computer graphics and geometric modeling. While the state-of-the-art P2M method achieves high-speed queries via Voronoi-based localization, it suffers from prohibitive precomputation costs. Its iterative Voronoi sweep for interference detection leads to redundant predicate evaluations and scales poorly on rotationally symmetric structures (e.g., spheres, cones or cylinders), where candidate counts grow quadratically. We propose P2M++ to address these limitations through three key contributions. First, we adaptively augment the set of mesh vertices with auxiliary sites in regions of high Voronoi vertex density to localize complex interference within minimal spatial regions. Second, we reformulate interference detection as a series of sphere-triangle collision tests centered at Voronoi cell corners, which are efficiently resolved using the base mesh's BVH. Finally, we enhance runtime performance by replacing the standard kd-tree search with a faster recursive dynamic programming implementation. Experimental results demonstrate that P2M++ is 3x-10x faster than the original P2M during preprocessing and 1.5x faster in queries, with even more pronounced gains on rotationally symmetric geometries.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents P2M++, an enhanced solver for point-to-mesh distance queries that extends the original P2M Voronoi-based localization method. It introduces three modifications: adaptive augmentation of mesh vertices with auxiliary sites in high Voronoi-density regions, reformulation of interference detection as sphere-triangle collision tests resolved via the base mesh BVH, and replacement of kd-tree search with a recursive dynamic programming implementation. The central claims are that these changes deliver 3x-10x faster preprocessing and 1.5x faster queries than P2M, with amplified gains on rotationally symmetric geometries such as spheres, cones, and cylinders.
Significance. If the modifications preserve exact equivalence to the original P2M distance and localization results, the reported speedups would be valuable for graphics and geometric modeling pipelines that perform repeated point-to-mesh queries, particularly those involving symmetric or high-density meshes where Voronoi sweep costs become prohibitive.
major comments (2)
- [Abstract] Abstract and experimental results: The performance claims (3x-10x preprocessing, 1.5x queries) are stated without any accompanying error metrics, accuracy comparisons, or validation details against the original P2M, leaving open whether the auxiliary-site augmentation and sphere-triangle reformulation produce identical candidate sets and distances.
- [Method] Method description: The assumption that reformulating interference detection as BVH-based sphere-triangle tests and adding auxiliary sites preserves correctness of the Voronoi sweep is not supported by any explicit equivalence test or counter-example check on the rotationally symmetric cases cited as the original bottleneck.
minor comments (1)
- The abstract would be clearer if it briefly indicated the mesh types or benchmark datasets used to obtain the reported speedups.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. The comments correctly identify the need for explicit empirical validation of equivalence. We address each major comment below and will revise the manuscript to incorporate the requested checks.
read point-by-point responses
-
Referee: [Abstract] Abstract and experimental results: The performance claims (3x-10x preprocessing, 1.5x queries) are stated without any accompanying error metrics, accuracy comparisons, or validation details against the original P2M, leaving open whether the auxiliary-site augmentation and sphere-triangle reformulation produce identical candidate sets and distances.
Authors: We agree that the abstract and results section would be strengthened by explicit accuracy metrics. Although auxiliary sites are inserted only at Voronoi vertices (preserving the underlying diagram) and sphere-triangle tests are algebraically equivalent to the original predicates, we will add a new experimental subsection that reports maximum and mean distance differences, candidate-set sizes, and localization outcomes between P2M and P2M++ on all benchmark meshes, including the rotationally symmetric cases. These comparisons will confirm identity within floating-point precision. revision: yes
-
Referee: [Method] Method description: The assumption that reformulating interference detection as BVH-based sphere-triangle tests and adding auxiliary sites preserves correctness of the Voronoi sweep is not supported by any explicit equivalence test or counter-example check on the rotationally symmetric cases cited as the original bottleneck.
Authors: We acknowledge that an explicit verification subsection is warranted. The reformulation replaces predicate evaluations with equivalent geometric tests and augments sites without modifying cell ownership for query points; however, we will include in the revised manuscript a dedicated correctness verification section containing direct comparisons of Voronoi cell assignments and final distances on spheres, cones, and cylinders, together with counter-example checks that enumerate all interfering triangles for representative query sets. revision: yes
Circularity Check
No circularity in algorithmic reformulations or experimental claims
full rationale
The paper describes three concrete algorithmic changes to the existing P2M method—adaptive auxiliary-site augmentation, reformulation of interference detection as BVH-accelerated sphere-triangle tests, and replacement of kd-tree search with recursive dynamic programming—followed by empirical timing measurements. No equations, fitted parameters, or first-principles derivations appear in the provided text; the speedup claims are presented as measured outcomes of these implementation modifications rather than as predictions derived from prior quantities by construction. No self-citations are invoked as load-bearing uniqueness theorems, and the central claims remain independent of any tautological reduction to the paper's own inputs.
Axiom & Free-Parameter Ledger
axioms (1)
- standard math BVH-based sphere-triangle collision tests are efficient and correct for the base mesh
Reference graph
Works this paper leans on
-
[1]
doi:10.1109/TVCG.2005.49 Gill Barequet and Sariel Har-Peled
Signed Distance Computation Using the Angle Weighted Pseudonormal.IEEE Transactions on Visualization and Computer Graphics11, 3 (May 2005), 243–253. doi:10.1109/TVCG.2005.49 Gill Barequet and Sariel Har-Peled
-
[2]
Efficiently Approximating the Minimum- Volume Bounding Box of a Point Set in Three Dimensions.Journal of Algorithms38, 1 (2001), 91–109. doi:10.1006/jagm.2000.1127 Matthew Berger, Andrea Tagliasacchi, Lee M Seversky, Pierre Alliez, Gaël Guennebaud, Joshua A Levine, Andrei Sharf, and Claudio T Silva
-
[3]
Mario Botsch, Leif Kobbelt, Mark Pauly, Pierre Alliez, and Bruno Lévy
A Survey of Surface Reconstruction from Point Clouds.Computer Graphics Forum36, 1 (2017), 301–329. Mario Botsch, Leif Kobbelt, Mark Pauly, Pierre Alliez, and Bruno Lévy
2017
-
[4]
Graph.21, 3 (July 2002), 594–603
Robust treatment of collisions, contact and friction for cloth animation.ACM Trans. Graph.21, 3 (July 2002), 594–603. doi:10.1145/566654.566623 Andreas Fabri and Sylvain Pion
-
[5]
CGAL: the Computational Geometry Algo- rithms Library. InProceedings of the 17th ACM SIGSPATIAL International Con- ference on Advances in Geographic Information Systems(Seattle, Washington) (GIS ’09). Association for Computing Machinery, New York, NY, USA, 538–539. doi:10.1145/1653771.1653865 Sarah F. Frisken, Ronald N. Perry, Alyn P. Rockwood, and Thouis...
-
[6]
Adap- tively sampled distance fields: a general representation of shape for computer graphics. InProceedings of the 27th Annual Conference on Computer Graphics and Interactive Techniques (SIGGRAPH ’00). ACM Press/Addison-Wesley Publishing Co., USA, 249–254. doi:10.1145/344779.344899 S. Gottschalk, M. C. Lin, and D. Manocha
-
[7]
OBBTree: a hierarchical structure for rapid interference detection. InProceedings of the 23rd Annual Conference on Computer Graphics and Interactive Techniques (SIGGRAPH ’96). Association for Computing Machinery, New York, NY, USA, 171–180. doi:10.1145/237170.237244 S. Gottschalk, M. C. Lin, and D. Manocha. 2023.OBBTree: A Hierarchical Structure for Rapid...
-
[8]
Graph.22, 3 (July 2003), 871–878
Nonconvex rigid bodies with stacking.ACM Trans. Graph.22, 3 (July 2003), 871–878. doi:10.1145/882262. 882358 Hugues Hoppe, Tony DeRose, Tom Duchamp, John McDonald, and Werner Stuetzle
-
[9]
Surface reconstruction from unorganized points.SIGGRAPH Comput. Graph. 26, 2 (July 1992), 71–78. doi:10.1145/142920.134011 Clément Jamin, Sylvain Pion, and Monique Teillaud
-
[10]
IEEE Transactions on Robotics and Automation , volume = 12, number = 4, pages =
Probabilistic roadmaps for path planning in high-dimensional configuration spaces.IEEE Transactions on Robotics and Automation12, 4 (1996), 566–580. doi:10.1109/70.508439 Michael Kazhdan, Matthew Bolitho, and Hugues Hoppe
-
[11]
Computers & Graphics30(3), 450–459 (2006) https://doi.org/10.1016/j.cag.2006.02.011
A dynamic bounding volume hierarchy for generalized collision detection.Computers & Graphics30, 3 (2006), 450–459. doi:10.1016/j.cag.2006.02.011 S.M. LaValle and J.J. Kuffner
-
[12]
InProceedings 1999 IEEE International Conference on Robotics and Automation (Cat
Randomized kinodynamic planning. InProceedings 1999 IEEE International Conference on Robotics and Automation (Cat. No.99CH36288C), Vol
1999
-
[13]
doi:10.1109/ROBOT.1999.770022 Donald Meagher
473–479 vol.1. doi:10.1109/ROBOT.1999.770022 Donald Meagher
-
[14]
doi:10.1016/0146-664X(82)90104-6 Brian Mirtich
Geometric modeling using octree encoding.Computer Graphics and Image Processing19, 2 (1982), 129–147. doi:10.1016/0146-664X(82)90104-6 Brian Mirtich
-
[15]
Graph.17, 3 (July 1998), 177–208
V-Clip: fast and robust polyhedral collision detection.ACM Trans. Graph.17, 3 (July 1998), 177–208. doi:10.1145/285857.285860 Hassan Naderi Mohammad Reza Abbasifard, Bijan Ghahremani
-
[16]
doi:10.5120/16754-7073 Matthias Müller, Bruno Heidelberger, Marcus Hennix, and John Ratcliff
A Survey on Nearest Neighbor Search Methods.International Journal of Computer Applications 95, 25 (June 2014), 39–52. doi:10.5120/16754-7073 Matthias Müller, Bruno Heidelberger, Marcus Hennix, and John Ratcliff
-
[17]
Position based dynamics.J. Vis. Comun. Image Represent.18, 2 (April 2007), 109–118. doi:10. 1016/j.jvcir.2007.01.005 François Pomerleau, Francis Colas, Roland Siegwart, and Stéphane Magnenat
2007
-
[18]
Robots34, 3 (April 2013), 133–148
Comparing ICP variants on real-world data sets.Auton. Robots34, 3 (April 2013), 133–148. doi:10.1007/s10514-013-9327-2 Eduard Pujol and Antonio Chica
-
[19]
doi:10.1111/cgf.14861 Sean Quinlan
Triangle Influence Supersets for Fast Distance Computation.Computer Graphics Forum(2023). doi:10.1111/cgf.14861 Sean Quinlan
-
[20]
In2009 IEEE Inter- national Conference on Robotics and Automation
CHOMP: Gradient optimization techniques for efficient motion planning. In2009 IEEE Inter- national Conference on Robotics and Automation. 489–494. doi:10.1109/ROBOT.2009. 5152817 Rohan Sawhney. 2021.FCPW: Fastest Closest Points in the West. Matthias Teschner, Bruno Heidelberger, Matthias Mueller, Dan Pomeranets, and Markus Gross
-
[21]
Computer Graphics Forum24, 1 (2005), 61–81
A Survey of Static and Dynamic Collision Detection Algorithms. Computer Graphics Forum24, 1 (2005), 61–81. Gino van den Bergen
2005
-
[22]
Efficient collision detection of complex deformable models using AABB trees.J. Graph. Tools2, 4 (Jan. 1998), 1–13. doi:10.1080/10867651.1997. 10487480 Ingo Wald, Will Usher, Nate Morrical, Laura Lediaev, and Valerio Pascucci
-
[23]
InProceedings of the Conference on High-Performance Graph- ics(Strasbourg, France)(HPG ’19)
RTX beyond ray tracing: exploring the use of hardware ray tracing cores for tet- mesh point location. InProceedings of the Conference on High-Performance Graph- ics(Strasbourg, France)(HPG ’19). Eurographics Association, Goslar, DEU, 7–13. doi:10.2312/hpg.20191189 Ingo Wald, Sven Woop, Carsten Benthin, Gregory S. Johnson, and Manfred Ernst
-
[24]
Embree: a kernel framework for efficient CPU ray tracing.ACM Trans. Graph.33, 4, Article 143 (July 2014), 8 pages. doi:10.1145/2601097.2601199 Pengfei Wang, Jiantao Song, Shiqing Xin, Shuangmin Chen, Changhe Tu, Wenping Wang, and Jiaye Wang
-
[25]
Efficient Nearest Neighbor Search Using Dynamic Programming.IEEE Transactions on Pattern Analysis and Machine Intelligence(2025), 1–16. doi:10.1109/TPAMI.2025.3610211 Chen Zong, Jiacheng Xu, Jiantao Song, Shuangmin Chen, Shiqing Xin, Wenping Wang, and Changhe Tu
-
[26]
Graph.42, 4, Article 147 (July 2023), 13 pages
P2M: A Fast Solver for Querying Distance from Point to Mesh Surface.ACM Trans. Graph.42, 4, Article 147 (July 2023), 13 pages. doi:10. 1145/3592439 Conference, ,
2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.