Recognition: unknown
QHyer: Q-conditioned Hybrid Attention-mamba Transformer for Offline Goal-conditioned RL
Pith reviewed 2026-05-11 01:13 UTC · model grok-4.3
The pith
QHyer replaces return-to-go conditioning with a flow-parameterized goal-reaching Q-estimator and adds a gated hybrid attention-mamba backbone to learn goal-reaching policies from static datasets that mix Markovian and non-Markovian history.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
QHyer replaces return-to-go with a flow-parameterized, state-conditioned goal-reaching Q-estimator that supplies discriminative guidance for stitching goal-reaching behaviors from diverse demonstrations under sparse rewards, and it introduces a gated Hybrid Attention-Mamba backbone that performs content-adaptive history compression while preserving local dynamics, allowing the model to handle temporally heterogeneous data more effectively than prior pure-attention or fixed-window hybrids.
What carries the argument
The gated hybrid attention-mamba backbone paired with a flow-parameterized, state-conditioned goal-reaching Q-estimator, which together enable adaptive compression of mixed history and effective behavior stitching.
If this is right
- Goal-reaching policies become learnable from static datasets that combine Markovian local dynamics with longer non-Markovian dependencies.
- Behavior stitching across demonstrations works under sparse rewards because the Q-estimator remains discriminative where return-to-go does not.
- History compression adapts its effective memory length to the data rather than using a fixed window that truncates context.
- The same architecture delivers improved results on both non-Markovian and Markovian datasets without separate handling for each case.
Where Pith is reading between the lines
- The Q-estimator approach may extend to other offline RL problems where return-to-go signals become uninformative due to sparse or delayed rewards.
- Content-adaptive compression could apply to sequence modeling tasks outside goal-conditioned RL whenever local and global temporal structure coexist.
- If the Q-estimator proves robust, it reduces reliance on reward engineering when curating offline datasets for goal-reaching tasks.
Load-bearing premise
The flow-parameterized Q-estimator must accurately estimate goal-reaching values from static data even when rewards are sparse, and the hybrid backbone must compress history in a content-adaptive way without losing essential local Markovian structure.
What would settle it
Training QHyer on the same non-Markovian and Markovian benchmark datasets and measuring that its success rate or normalized score does not exceed that of Decision Transformer or LSDT baselines would falsify the central performance claim.
Figures













read the original abstract
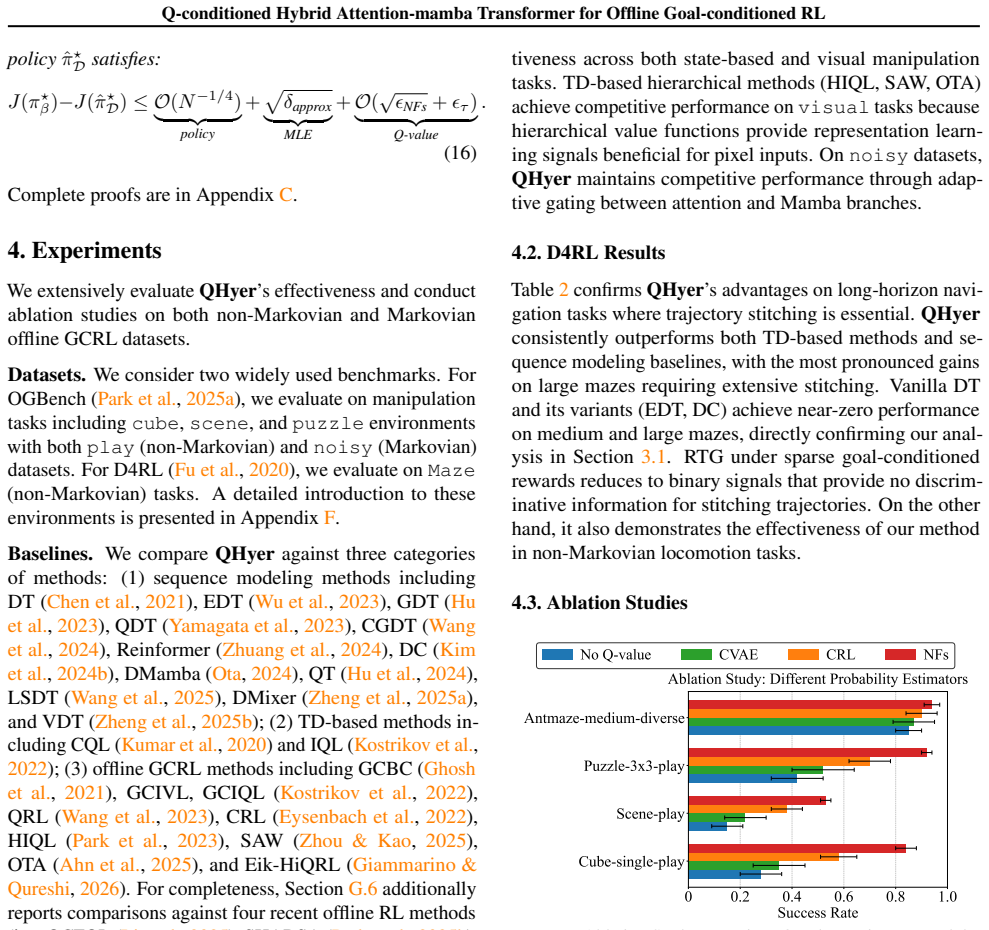
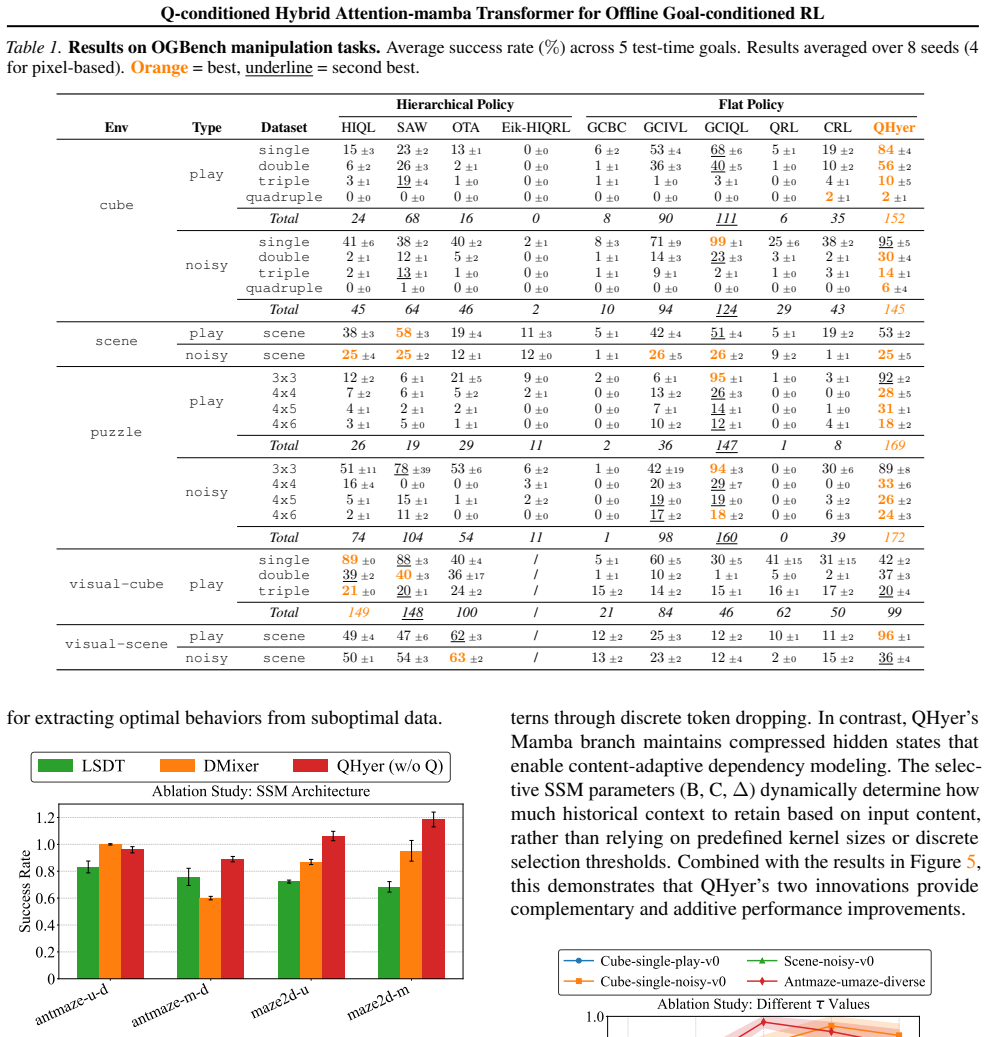
Offline goal-conditioned RL (GCRL) learns goal-reaching policies from static datasets, but real-world datasets are often partially observable and history-dependent, exhibiting a mix of Markovian and non-Markovian that violate standard RL assumptions. History-aware sequence models such as Decision Transformer (DT) are a natural fit for long-term dependency modeling, yet pure attention is inefficient and brittle when handling local Markovian structure and long-range context simultaneously. Although recent hybrid architectures (e.g., LSDT) introduce local extractors to improve local dependencies modeling, the fixed-window extraction cannot adapt its effective memory to varying dependency lengths in temporally heterogeneous settings, often truncating long-range context rather than compressing its content adaptively. Moreover, sequential offline GCRL faces a key bottleneck: under sparse rewards, return-to-go (RTG) becomes non-discriminative across sub-trajectories, providing little guidance signal for stitching goal-reaching behaviors from diverse demonstrations. To address these, we propose \textbf{QHyer}, which replaces RTG with a flow-parameterized, state-conditioned goal-reaching Q-estimator to support stitching across demonstrations, and introduces a gated Hybrid Attention-Mamba backbone that performs content-adaptive history compression while preserving local dynamics. Extensive experiments demonstrate that \textbf{QHyer} achieves state-of-the-art performance on both non-Markovian and Markovian datasets, validating its effectiveness for diverse scenarios.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces QHyer for offline goal-conditioned RL on datasets that mix Markovian and non-Markovian structure. It replaces return-to-go conditioning with a flow-parameterized, state-conditioned goal-reaching Q-estimator intended to enable stitching of goal-reaching behaviors from diverse demonstrations under sparse rewards, and proposes a gated hybrid attention-mamba backbone that performs content-adaptive history compression while preserving local dynamics. The central empirical claim is state-of-the-art performance on both non-Markovian and Markovian datasets.
Significance. If the results and ablations hold, the work would provide a concrete advance in offline GCRL by addressing the non-discriminative nature of RTG under sparsity and the fixed-window limitations of prior hybrid sequence models. The combination of flow-based Q-estimation with adaptive compression could improve sample efficiency in temporally heterogeneous settings.
major comments (1)
- [§3] §3: The Q-estimator is specified as state-conditioned only. In explicitly history-dependent non-Markovian regimes this creates a potential mismatch, because the stitching signal must discriminate among sub-trajectories that share the same current state but differ in relevant history; it is not shown that the estimator receives the same compressed history representation produced by the gated hybrid backbone. If this assumption does not hold, the claimed improvement on non-Markovian datasets cannot be attributed to the proposed RTG replacement.
minor comments (2)
- [Abstract] The abstract asserts SOTA performance without naming the datasets, baselines, or metrics; the experimental section should make these explicit and include ablations isolating the Q-estimator versus the backbone.
- [§3] Notation for the flow-parameterized Q-estimator and the gating mechanism would benefit from a single consolidated equation block early in §3 to aid reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. The major comment raises an important point about the integration between the Q-estimator and the hybrid backbone in non-Markovian regimes. We address this below and outline the changes we will make.
read point-by-point responses
-
Referee: [§3] §3: The Q-estimator is specified as state-conditioned only. In explicitly history-dependent non-Markovian regimes this creates a potential mismatch, because the stitching signal must discriminate among sub-trajectories that share the same current state but differ in relevant history; it is not shown that the estimator receives the same compressed history representation produced by the gated hybrid backbone. If this assumption does not hold, the claimed improvement on non-Markovian datasets cannot be attributed to the proposed RTG replacement.
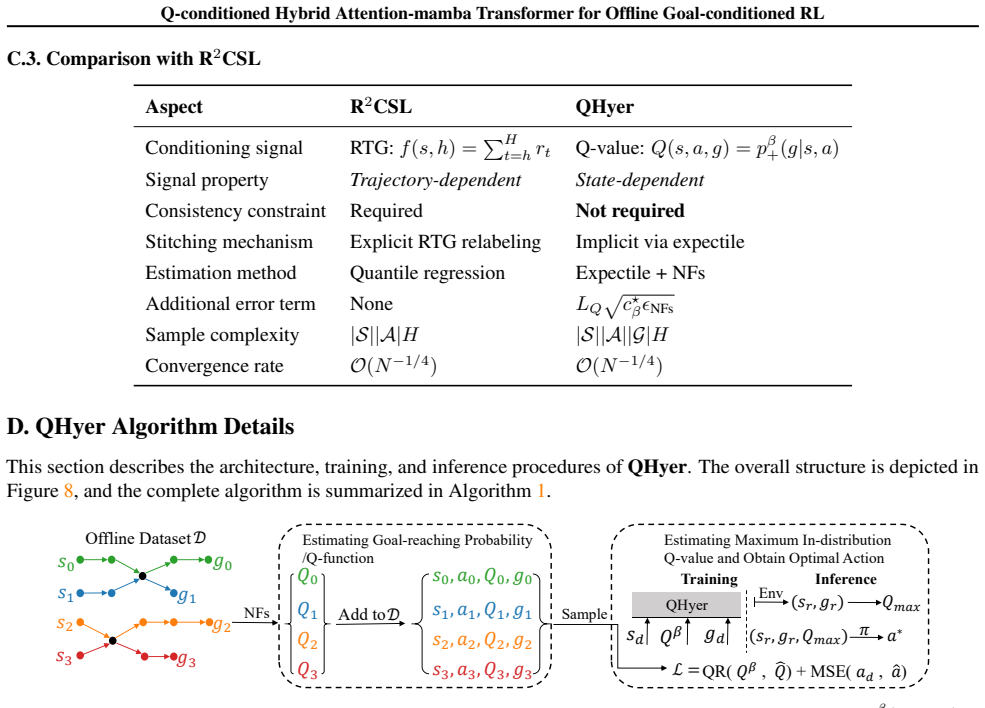
Authors: We appreciate this observation. In the QHyer architecture the gated hybrid attention-mamba backbone first processes the full observation sequence and produces a content-adaptive compressed representation. The flow-parameterized Q-estimator is then conditioned on this backbone output (rather than on the raw current state alone), so that the resulting Q-values incorporate the relevant history compression needed for stitching in non-Markovian settings. While the manuscript describes the estimator as “state-conditioned” for conciseness, the conditioning is performed on the backbone-encoded state. We acknowledge that this data-flow was not stated with sufficient explicitness in §3. In the revised manuscript we will add a clarifying paragraph, update the architecture diagram, and include a short ablation confirming that removing the backbone input to the Q-estimator degrades performance on the non-Markovian datasets. revision: yes
Circularity Check
No circularity: method proposal relies on external experiments without self-referential derivations
full rationale
The provided manuscript text contains no equations, derivations, or mathematical reductions that equate any claimed result or prediction to its own inputs by construction. The core proposal replaces RTG with a flow-parameterized Q-estimator and introduces a gated hybrid backbone, but these are presented as architectural choices validated by experiments on Markovian and non-Markovian datasets rather than derived from self-citations or fitted parameters renamed as predictions. No load-bearing self-citation chains, uniqueness theorems from the same authors, or ansatzes smuggled via prior work are invoked to force the central claims. The SOTA performance assertions rest on empirical benchmarks external to any internal fitting loop, rendering the derivation chain self-contained.
Axiom & Free-Parameter Ledger
free parameters (1)
- flow parameters
axioms (1)
- domain assumption Real-world offline datasets exhibit a mix of Markovian and non-Markovian structure that violates standard RL assumptions
invented entities (1)
-
gated Hybrid Attention-Mamba backbone
no independent evidence
Reference graph
Works this paper leans on
-
[1]
arXiv preprint arXiv:1807.10299 , year=
Variational option discovery algorithms , author=. arXiv preprint arXiv:1807.10299 , year=
-
[2]
Advantage-Weighted Regression: Simple and Scalable Off-Policy Reinforcement Learning , author=
-
[3]
Advances in neural information processing systems , volume=
Deep reinforcement learning at the edge of the statistical precipice , author=. Advances in neural information processing systems , volume=
-
[4]
Adam: A Method for Stochastic Optimization , author=. Computer Science , year=
-
[5]
International economic review , pages=
On the estimation of production frontiers: maximum likelihood estimation of the parameters of a discontinuous density function , author=. International economic review , pages=. 1976 , publisher=
work page 1976
-
[6]
Morgan Kaufmann Publishers Inc
Approximately Optimal Approximate Reinforcement Learning , author=. Morgan Kaufmann Publishers Inc. , year=
-
[7]
Actionable Models: Unsupervised Offline Reinforcement Learning of Robotic Skills , author=
-
[8]
Goal-Conditioned Reinforcement Learning with Imagined Subgoals , author=
-
[9]
Scaling Learning Algorithms Towards
Bengio, Yoshua and LeCun, Yann , booktitle =. Scaling Learning Algorithms Towards
-
[10]
Learning successor states and goal-dependent values: A mathematical viewpoint , author=. arXiv preprint arXiv:2101.07123 , year=
-
[11]
arXiv preprint arXiv:2202.11566 , year=
Pessimistic bootstrapping for uncertainty-driven offline reinforcement learning , author=. arXiv preprint arXiv:2202.11566 , year=
-
[12]
Advances in neural information processing systems , volume=
Offline rl without off-policy evaluation , author=. Advances in neural information processing systems , volume=
-
[13]
The Thirteenth International Conference on Learning Representations , year=
Accelerating Goal-Conditioned Reinforcement Learning Algorithms and Research , author=. The Thirteenth International Conference on Learning Representations , year=
-
[14]
Proceedings of the 3rd International Conference on Development and Learning , volume=
Intrinsically motivated learning of hierarchical collections of skills , author=. Proceedings of the 3rd International Conference on Development and Learning , volume=. 2004 , organization=
work page 2004
-
[15]
Advances in neural information processing systems , volume=
Successor features for transfer in reinforcement learning , author=. Advances in neural information processing systems , volume=
-
[16]
Advances in neural information processing systems , volume=
Hindsight experience replay , author=. Advances in neural information processing systems , volume=
-
[17]
Grounding language to autonomously-acquired skills via goal generation,
Grounding language to autonomously-acquired skills via goal generation , author=. arXiv preprint arXiv:2006.07185 , year=
-
[18]
Advances in neural information processing systems , volume=
Rewriting history with inverse rl: Hindsight inference for policy improvement , author=. Advances in neural information processing systems , volume=
-
[19]
Exploration by Random Network Distillation
Exploration by random network distillation , author=. arXiv preprint arXiv:1810.12894 , year=
-
[20]
Advances in Neural Information Processing Systems , volume=
When does return-conditioned supervised learning work for offline reinforcement learning? , author=. Advances in Neural Information Processing Systems , volume=
-
[21]
Importance weighted autoencoders
Importance weighted autoencoders , author=. arXiv preprint arXiv:1509.00519 , year=
-
[22]
Dota 2 with Large Scale Deep Reinforcement Learning
Dota 2 with large scale deep reinforcement learning , author=. arXiv preprint arXiv:1912.06680 , year=
work page internal anchor Pith review arXiv 1912
-
[23]
ESAIM: Control, Optimisation and Calculus of Variations , volume=
Second order optimality conditions in the smooth case and applications in optimal control , author=. ESAIM: Control, Optimisation and Calculus of Variations , volume=. 2007 , publisher=
work page 2007
-
[24]
International Conference on Machine Learning , pages=
Agent57: Outperforming the atari human benchmark , author=. International Conference on Machine Learning , pages=. 2020 , organization=
work page 2020
-
[25]
Advances in neural information processing systems , volume=
Decision transformer: Reinforcement learning via sequence modeling , author=. Advances in neural information processing systems , volume=
- [26]
-
[27]
Advances in Neural Information Processing Systems , volume=
Plangan: Model-based planning with sparse rewards and multiple goals , author=. Advances in Neural Information Processing Systems , volume=
-
[28]
arXiv preprint arXiv:1902.04546 , year=
ACTRCE: Augmenting Experience via Teacher's Advice For Multi-Goal Reinforcement Learning , author=. arXiv preprint arXiv:1902.04546 , year=
-
[29]
Actionable models: Unsupervised offline reinforcement learning of robotic skills
Actionable models: Unsupervised offline reinforcement learning of robotic skills , author=. arXiv preprint arXiv:2104.07749 , year=
-
[30]
International conference on machine learning , pages=
Goal-conditioned reinforcement learning with imagined subgoals , author=. International conference on machine learning , pages=. 2021 , organization=
work page 2021
-
[31]
Advances in Neural Information Processing Systems , volume=
Language as a cognitive tool to imagine goals in curiosity driven exploration , author=. Advances in Neural Information Processing Systems , volume=
-
[32]
International Conference on Machine Learning , pages=
On the statistical benefits of temporal difference learning , author=. International Conference on Machine Learning , pages=. 2023 , organization=
work page 2023
-
[33]
International Conference on Machine Learning , pages=
Explore, discover and learn: Unsupervised discovery of state-covering skills , author=. International Conference on Machine Learning , pages=. 2020 , organization=
work page 2020
-
[34]
CONTINUOUS CONTROL WITH DEEP REINFORCEMENT LEARNING , author=
-
[35]
Advances in neural information processing systems , volume=
Goal-conditioned imitation learning , author=. Advances in neural information processing systems , volume=
-
[36]
International Journal of Serious Games , volume=
Improved Reinforcement Learning in Asymmetric Real-time Strategy Games via Strategy Diversity: A Case Study for Hunting-of-the-Plark Game , author=. International Journal of Serious Games , volume=
-
[37]
Journal of Intelligent & Robotic Systems , volume=
Deep reinforcement learning for a humanoid robot soccer player , author=. Journal of Intelligent & Robotic Systems , volume=. 2021 , publisher=
work page 2021
-
[38]
arXiv preprint arXiv:2105.13806 , year=
DRL: Deep Reinforcement Learning for Intelligent Robot Control--Concept, Literature, and Future , author=. arXiv preprint arXiv:2105.13806 , year=
-
[39]
Divide-and-Conquer Monte Carlo Tree Search For Goal-Directed Planning , author=
-
[40]
Advances in Neural Information Processing Systems , volume=
Adversarial intrinsic motivation for reinforcement learning , author=. Advances in Neural Information Processing Systems , volume=
-
[41]
Sample-Efficient Reinforcement Learning via Counterfactual-Based Data Augmentation , author=. 2020 , eprint=
work page 2020
-
[42]
Advances in neural information processing systems , volume=
Generalized hindsight for reinforcement learning , author=. Advances in neural information processing systems , volume=
-
[43]
arXiv preprint arXiv:2011.08909 , year=
C-learning: Learning to achieve goals via recursive classification , author=. arXiv preprint arXiv:2011.08909 , year=
-
[44]
Advances in Neural Information Processing Systems , volume=
Imitating past successes can be very suboptimal , author=. Advances in Neural Information Processing Systems , volume=
-
[45]
Advances in Neural Information Processing Systems , volume=
Contrastive learning as goal-conditioned reinforcement learning , author=. Advances in Neural Information Processing Systems , volume=
-
[46]
Diversity is all you need: Learning skills without a reward function , author=. arXiv preprint arXiv:1802.06070 , year=
-
[47]
arXiv preprint arXiv:2112.10751 , year=
Rvs: What is essential for offline rl via supervised learning? , author=. arXiv preprint arXiv:2112.10751 , year=
-
[48]
First return, then explore , author=. Nature , volume=. 2021 , publisher=
work page 2021
-
[49]
arXiv preprint arXiv:2111.10364 , year=
Generalized decision transformer for offline hindsight information matching , author=. arXiv preprint arXiv:2111.10364 , year=
-
[50]
D4RL: Datasets for Deep Data-Driven Reinforcement Learning
D4rl: Datasets for deep data-driven reinforcement learning , author=. arXiv preprint arXiv:2004.07219 , year=
work page internal anchor Pith review arXiv 2004
-
[51]
Proceedings of the AAAI conference on artificial intelligence , volume=
Deep reinforcement learning that matters , author=. Proceedings of the AAAI conference on artificial intelligence , volume=
-
[52]
Generalization in Reinforcement Learning by Soft Data Augmentation , author=. 2021 , eprint=
work page 2021
-
[53]
arXiv preprint arXiv:2002.02089 , year=
Soft hindsight experience replay , author=. arXiv preprint arXiv:2002.02089 , year=
-
[54]
Advances in Neural Information Processing Systems , volume=
Discrete Compositional Representations as an Abstraction for Goal Conditioned Reinforcement Learning , author=. Advances in Neural Information Processing Systems , volume=
-
[55]
Advances in neural information processing systems , volume=
Curriculum-guided hindsight experience replay , author=. Advances in neural information processing systems , volume=
-
[56]
International conference on machine learning , pages=
Off-policy deep reinforcement learning without exploration , author=. International conference on machine learning , pages=. 2019 , organization=
work page 2019
-
[57]
International conference on machine learning , pages=
Addressing function approximation error in actor-critic methods , author=. International conference on machine learning , pages=. 2018 , organization=
work page 2018
-
[58]
2022 IEEE Conference on Games (CoG) , pages=
Multi-goal Reinforcement Learning via Exploring Successor Matching , author=. 2022 IEEE Conference on Games (CoG) , pages=. 2022 , organization=
work page 2022
-
[59]
arXiv preprint arXiv:1704.03012 , year=
Stochastic neural networks for hierarchical reinforcement learning , author=. arXiv preprint arXiv:1704.03012 , year=
-
[60]
Advances in neural information processing systems , volume=
A minimalist approach to offline reinforcement learning , author=. Advances in neural information processing systems , volume=
-
[61]
International Conference on Learning Representations , year=
Learning to Reach Goals via Iterated Supervised Learning , author=. International Conference on Learning Representations , year=
-
[62]
Conference on Robot Learning , pages=
Relay Policy Learning: Solving Long-Horizon Tasks via Imitation and Reinforcement Learning , author=. Conference on Robot Learning , pages=. 2020 , organization=
work page 2020
- [63]
-
[64]
Raj Ghugare and Matthieu Geist and Glen Berseth and Benjamin Eysenbach , booktitle=. Closing the Gap between
-
[65]
Reports on Mathematical Physics , volume=
Weighted entropy , author=. Reports on Mathematical Physics , volume=. 1971 , publisher=
work page 1971
- [66]
-
[67]
2017 IEEE international conference on robotics and automation (ICRA) , pages=
Deep reinforcement learning for robotic manipulation with asynchronous off-policy updates , author=. 2017 IEEE international conference on robotics and automation (ICRA) , pages=. 2017 , organization=
work page 2017
-
[68]
arXiv preprint arXiv:1906.05030 , year=
Fast task inference with variational intrinsic successor features , author=. arXiv preprint arXiv:1906.05030 , year=
-
[69]
arXiv preprint arXiv:2304.13774 , year=
Distance Weighted Supervised Learning for Offline Interaction Data , author=. arXiv preprint arXiv:2304.13774 , year=
-
[70]
arXiv preprint arXiv:1907.08225 , year=
Dynamical distance learning for semi-supervised and unsupervised skill discovery , author=. arXiv preprint arXiv:1907.08225 , year=
-
[71]
Soft Actor-Critic Algorithms and Applications , author=
-
[72]
International conference on machine learning , pages=
Soft actor-critic: Off-policy maximum entropy deep reinforcement learning with a stochastic actor , author=. International conference on machine learning , pages=. 2018 , organization=
work page 2018
-
[73]
arXiv preprint arXiv:2305.10171 , year=
Goal-Conditioned Supervised Learning with Sub-Goal Prediction , author=. arXiv preprint arXiv:2305.10171 , year=
-
[74]
Image Augmentation Is All You Need: Regularizing Deep Reinforcement Learning from Pixels , author=. 2021 , eprint=
work page 2021
-
[75]
Learning to achieve goals , author=. IJCAI , volume=. 1993 , organization=
work page 1993
-
[76]
An introduction to variational autoencoders , author=. arXiv preprint arXiv:1906.02691 , year=
-
[77]
arXiv preprint arXiv:1912.13465 , year=
Reward-conditioned policies , author=. arXiv preprint arXiv:1912.13465 , year=
-
[78]
Adam: A Method for Stochastic Optimization
Adam: A method for stochastic optimization , author=. arXiv preprint arXiv:1412.6980 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[79]
arXiv preprint arXiv:2310.12972 , year=
CCIL: Continuity-based Data Augmentation for Corrective Imitation Learning , author=. arXiv preprint arXiv:2310.12972 , year=
-
[80]
Exploiting Multi-step Sample Trajectories for Approximate Value Iteration
Wright, Robert and Loscalzo, Steven and Dexter, Philip and Yu, Lei. Exploiting Multi-step Sample Trajectories for Approximate Value Iteration. Machine Learning and Knowledge Discovery in Databases. 2013
work page 2013
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.