Recognition: unknown
Multistable energy landscapes for adaptive microscopic machines
Pith reviewed 2026-05-08 02:46 UTC · model grok-4.3
The pith
Designed multistable energy landscapes let microscopic machines execute different functions under the same external magnetic field.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
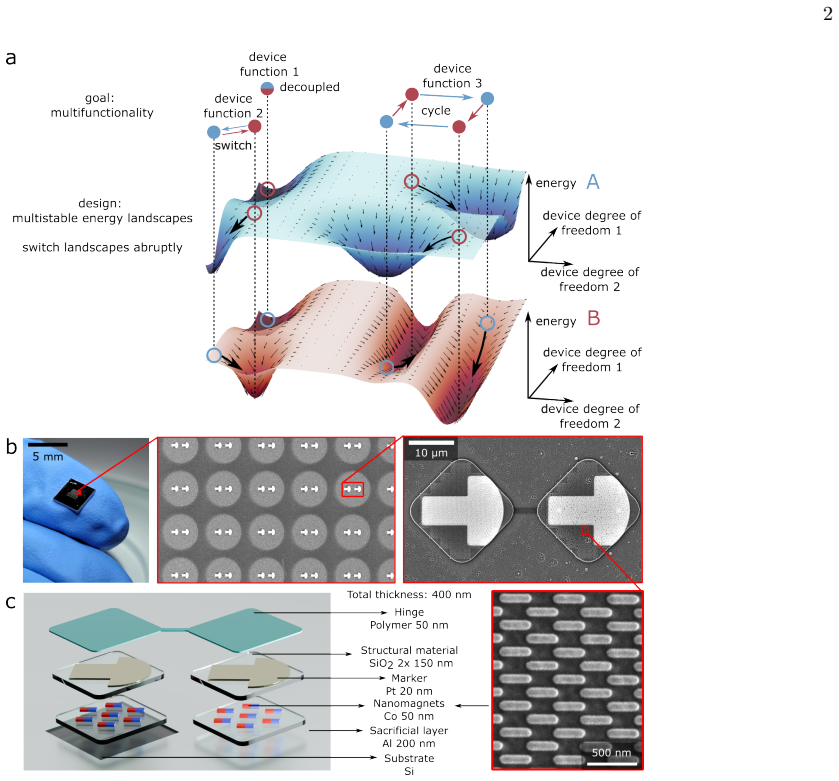
Energy landscapes with designed multistability enable the same externally applied field to drive multiple configurations and dynamic responses in microscopic machines, enabling increasing levels of autonomy. This is achieved by writing bistable or multistable potentials into the device structure so that the machine's current configuration determines its next behavior under identical driving conditions.
What carries the argument
Multistable energy landscapes programmed into the microscopic devices, which create configuration-dependent responses to a uniform external magnetic field.
If this is right
- A single magnetic field can hold a device in either of two stable mechanical configurations.
- Adding degrees of freedom converts symmetric field oscillation into directed net displacement of the surroundings.
- Continuous symmetry allows a machine to channel one-degree-of-freedom actuation into locomotion and to adapt when other machines exert forces.
Where Pith is reading between the lines
- Swarm-level coordination could emerge if each machine's internal state encodes simple rules for interaction without global field changes.
- The same multistability principle might transfer to non-magnetic drives such as optical or chemical gradients in microfluidic settings.
- At true micro-scales, thermal noise may set a lower size limit below which designed multistability becomes unreliable.
Load-bearing premise
The designed multistable landscapes can be precisely written into the devices and remain stable under applied fields without unintended transitions caused by fabrication imperfections or thermal fluctuations.
What would settle it
Fabricate the multistable devices, apply the intended magnetic field sequence, and observe whether multiple distinct stable configurations and dynamic responses appear as designed or whether the system collapses to a single behavior.
Figures


read the original abstract
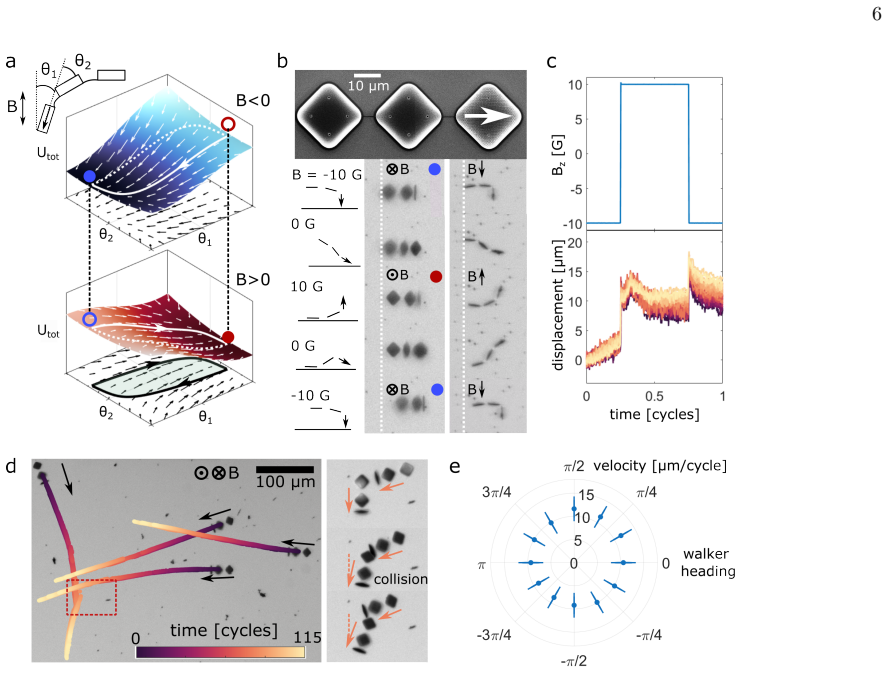
The past few years have seen great strides in our ability to build synthetic microscopic machines. However, the function of such machines is often controlled directly by externally applied fields that deterministically specify the instantaneous machine dynamics. A crucial step towards machines that can respond adaptively to changes in their environment is the ability to program multiple functions that actuate under the same external driving field, so that their internal state dictates which function is executed. Here, we demonstrate that energy landscapes with designed multistability enable the same externally applied field to drive multiple configurations and dynamic responses in microscopic machines, enabling increasing levels of autonomy. We show three examples. First, we write a bistable energy landscape into a microscopic device, enabling the device to exhibit two stable mechanical configurations under the same external magnetic field. Next, adding a second degree of freedom enables differing dynamic responses to the same external magnetic field, which we direct into net displacement of the environment. Finally, we demonstrate how a microscopic machine with a continuous symmetry autonomously channels a single degree-of-freedom magnetic actuation into locomotion and adaptively responds to forces induced by other machines.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that designing multistable energy landscapes into microscopic machines allows the same externally applied magnetic field to drive multiple stable configurations and dynamic responses, with the internal state selecting the function. This is illustrated via three experimental demonstrations: (1) a bistable device exhibiting two mechanical configurations under identical field conditions, (2) a two-degree-of-freedom system that converts the field into net environmental displacement, and (3) a continuous-symmetry machine that achieves locomotion while adaptively responding to forces from neighboring machines.
Significance. If the results are robust, the work provides a concrete experimental route toward greater autonomy in microscopic machines by encoding multiple behaviors in the energy landscape rather than varying the external drive. This aligns with and extends recent progress in synthetic soft-matter devices. The direct fabrication-based demonstrations are a strength, as they show the concept is realizable without additional control hardware. However, the absence of quantitative metrics limits evaluation of how well the approach scales or tolerates real-world imperfections.
major comments (3)
- Abstract and descriptions of the three demonstrations: No quantitative data, error bars, transition statistics, or measured energy barriers (relative to kT) are supplied for any example. This is load-bearing for the central claim, as the multistability must remain stable against thermal fluctuations and fabrication variations for the internal-state selection mechanism to function reliably.
- Third demonstration (continuous-symmetry locomotion): The claim that the machine 'autonomously channels' single-DOF actuation into locomotion and inter-machine adaptation lacks supporting measurements of the energy landscape symmetry, force thresholds, or adaptation dynamics. Without these, it is unclear whether the observed behavior arises from the designed multistability or from uncontrolled fabrication details.
- First demonstration (bistable device): The assumption that the written energy landscape produces two distinct, field-stable configurations without unintended switching is central but unsupported by any reported barrier heights, hysteresis loops, or repeated switching statistics.
minor comments (2)
- The abstract states three demonstrations but provides no figure references or section numbers linking to the supporting data; adding explicit cross-references would improve readability.
- Notation for degrees of freedom and symmetry in the second and third examples could be clarified with a schematic diagram early in the text.
Simulated Author's Rebuttal
We thank the referee for their constructive review and positive evaluation of the significance of our work on multistable energy landscapes for microscopic machines. We address each major comment in detail below and have revised the manuscript to incorporate additional quantitative data, measurements, and clarifications.
read point-by-point responses
-
Referee: Abstract and descriptions of the three demonstrations: No quantitative data, error bars, transition statistics, or measured energy barriers (relative to kT) are supplied for any example. This is load-bearing for the central claim, as the multistability must remain stable against thermal fluctuations and fabrication variations for the internal-state selection mechanism to function reliably.
Authors: We agree that quantitative metrics are important to substantiate the stability of the multistable landscapes. In the revised manuscript, we have added error bars to all key measurements based on data from multiple independent devices and trials. Transition statistics are now reported, with unintended switching rates below 10% under the applied field conditions across repeated experiments. Energy barriers relative to kT are estimated from the critical magnetic field amplitudes inducing state transitions, using the known magnetic moments of the embedded particles; these yield barriers of 10-50 kT, sufficient to ensure stability against thermal fluctuations on the experimental timescales. These values and associated analyses are included in the main text, updated figures, and a new supplementary section. revision: yes
-
Referee: Third demonstration (continuous-symmetry locomotion): The claim that the machine 'autonomously channels' single-DOF actuation into locomotion and inter-machine adaptation lacks supporting measurements of the energy landscape symmetry, force thresholds, or adaptation dynamics. Without these, it is unclear whether the observed behavior arises from the designed multistability or from uncontrolled fabrication details.
Authors: We appreciate the referee's call for more rigorous quantification in the continuous-symmetry demonstration. The energy landscape symmetry follows directly from the device's circular geometry, which was confirmed via high-resolution imaging of the fabricated structures. We have added measurements of force thresholds obtained by ramping the magnetic field and recording the onset of locomotion, with thresholds reproducible to within 15% across devices. Adaptation dynamics are quantified through the response time to external perturbations mimicking neighboring machine forces, typically occurring within a few seconds. Control experiments on devices lacking the designed symmetry are now included to support that the behavior originates from the multistability rather than fabrication variations. These data appear in revised figures and supplementary videos. revision: yes
-
Referee: First demonstration (bistable device): The assumption that the written energy landscape produces two distinct, field-stable configurations without unintended switching is central but unsupported by any reported barrier heights, hysteresis loops, or repeated switching statistics.
Authors: We acknowledge that explicit reporting of these supporting data was missing from the original submission for the bistable device. The revised manuscript now presents measured hysteresis loops from cycling the external magnetic field, clearly showing two distinct stable configurations with switching thresholds separated by approximately 20%. Barrier heights are estimated at around 30 kT based on the field-dependent energy differences. Repeated switching statistics from more than 50 cycles per device confirm reliable bistability with negligible unintended transitions at the nominal operating field. These results are incorporated into the updated Figure 1 and accompanying text. revision: yes
Circularity Check
No significant circularity; experimental realization is self-contained
full rationale
The paper reports experimental fabrication and testing of microscopic devices with engineered multistable energy landscapes under uniform external magnetic fields. No equations, model derivations, fitted parameters, or predictions are presented that could reduce to inputs by construction. Multistability is achieved via physical design and fabrication choices, with observed configurations and dynamics selected by internal state; this does not invoke self-definitional relations, fitted-input predictions, or load-bearing self-citations that collapse the central claim. The demonstrations (bistable device, net displacement via two-DOF response, adaptive locomotion) are direct empirical realizations rather than derived results, rendering the work self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Multistable energy landscapes can be stably written into microscopic devices and maintained under external magnetic fields
Reference graph
Works this paper leans on
-
[1]
(a) Spin-coat and bake positive photoresist (UV 210-0.6)
Define and etch stepper alignment markers on the front side of the wafer. (a) Spin-coat and bake positive photoresist (UV 210-0.6). (b) Expose using a DUV stepper (ASML PAS 550/300C), post-exposure bake and develop by exposure to developer (AZ MIF 726). (c) Etch using a CH4 plasma for 5 minutes and 50 seconds in an Oxford PlasmaLab 80+ reactive ion etcher...
-
[2]
8 (a) Spin-coat and bake positive photoresist (UV 210-0.6)
Define and etch electron-beam alignment markers on the front side of the wafer. 8 (a) Spin-coat and bake positive photoresist (UV 210-0.6). (b) Expose using a DUV stepper (ASML PAS 550/300C), post-exposure bake and develop by exposure to developer (AZ MIF 726). (c) Etch using the Bosch process in a deep silicon etcher (Unaxis 770, 5 loops). (d) Remove pho...
-
[3]
(a) Deposit 200 nm aluminium by electron-beam evaporation (CVC SC4500)
Deposit and pattern the release layer. (a) Deposit 200 nm aluminium by electron-beam evaporation (CVC SC4500). (b) To protect the release layer during subsequent processing, grow an additional 10 nm alu- minium oxide by atomic layer deposition (Ox- ford ALD FlexAL). (c) Spin-coat and bake positive photoresist (UV 210-0.6). (d) Expose using a DUV stepper (...
-
[4]
The first 200 nm layer of silicon oxide is de- posited by high-density plasma CVD (Plasma- Therm Takachi HDP-CVD)
-
[5]
(a) Spin-coat and bake two layers of PMMA (495k PMMA A4 followed by 950k PMMA M2) to perform a bi-layer liftoff process
Define the nanomagnetic layer. (a) Spin-coat and bake two layers of PMMA (495k PMMA A4 followed by 950k PMMA M2) to perform a bi-layer liftoff process. (b) Spin-coat an anti-charging agent (DisChem DisCharge H20x2). (c) Use electron-beam lithography (JEOL JBX- 9500FS, 20 nA) to expose the resist. (d) After exposure, we rinse away the anti- charging agent ...
-
[6]
The second 100 nm layer of silicon oxide is de- posited by high-density plasma CVD (Plasma- Therm Takachi HDP-CVD)
-
[7]
(c) Expose the photoresist using a DUV stepper (ASML PAS 550/300C), post-exposure bake, and develop by exposure to developer (AZ MIF 726)
Define the marker layer by photolithography and etching (a) Sputter 30 nm of chromium (AJA sputter tool) (b) Spin-coat and bake positive photoresist (DUV 210-0.6). (c) Expose the photoresist using a DUV stepper (ASML PAS 550/300C), post-exposure bake, and develop by exposure to developer (AZ MIF 726). (d) Etch chromium by dry etching (5 minutes, PlasmaThe...
-
[8]
(a) Spin-coat and bake positive photoresist (DUV 210-0.6)
Etch the silicon oxide to define the particle shape. (a) Spin-coat and bake positive photoresist (DUV 210-0.6). (b) Expose the photoresist using a DUV stepper (ASML PAS 550/300C), post-exposure bake, and develop by exposure to developer (AZ MIF 726). (c) Etch through both silicon oxide layers in a CHF 3/O2 plasma for 17 minutes (Oxford PlasmaLab 80+). (d)...
-
[9]
(c) Expose the photoresist using a DUV stepper (ASML PAS 550/300C), post-exposure bake, and develop by exposure to developer (AZ MIF 726)
Define the hinge layer (a) Spin-coat and bake 60 nm of anti-reflective coating (DUV 42P-6, this is the structural ma- terial for the hinge) (b) Spin-coat and bake positive photoresist (DUV 210-0.6). (c) Expose the photoresist using a DUV stepper (ASML PAS 550/300C), post-exposure bake, and develop by exposure to developer (AZ MIF 726). (d) Etch hinge mate...
-
[10]
ACKNOWLEDGEMENTS This work was performed in part at the Cornell Nanoscale Facility, an NNCI member supported by the National Science Foundation with Grant No
Dice the sample into pieces (DISCO Dicing Saw). ACKNOWLEDGEMENTS This work was performed in part at the Cornell Nanoscale Facility, an NNCI member supported by the National Science Foundation with Grant No. NNCI- 2025233. This work made use of the Cornell Center for 9 Materials Research shared instrumentation facility. This work made use of a Quantum Desi...
2021
-
[11]
Palagi, A
S. Palagi, A. G. Mark, S. Y. Reigh, K. Melde, T. Qiu, H. Zeng, C. Parmeggiani, D. Martella, A. Sanchez- Castillo, N. Kapernaum,et al., Structured light enables biomimetic swimming and versatile locomotion of pho- toresponsive soft microrobots, Nature materials15, 647 (2016)
2016
-
[12]
M. Z. Miskin, A. J. Cortese, K. Dorsey, E. P. Espos- ito, M. F. Reynolds, Q. Liu, M. Cao, D. A. Muller, P. L. McEuen, and I. Cohen, Electronically integrated, mass-manufactured, microscopic robots, Nature584, 557 (2020)
2020
-
[13]
M. F. Reynolds, A. J. Cortese, Q. Liu, Z. Zheng, W. Wang, S. L. Norris, S. Lee, M. Z. Miskin, A. C. Mol- nar, I. Cohen,et al., Microscopic robots with onboard digital control, Science Robotics7, eabq2296 (2022)
2022
-
[14]
X. Hong, B. Xu, G. Li, F. Nan, X. Wang, Q. Liang, W. Dong, W. Dong, H. Sun, Y. Zhang,et al., Optoelec- tronically navigated nano-kirigami microrotors, Science Advances10, eadn7582 (2024)
2024
-
[15]
L. C. Hanson, W. H. Reinhardt, S. Shrager, T. Sivaku- mar, and M. Z. Miskin, Electrokinetic propulsion for electronically integrated microscopic robots, Proceedings of the National Academy of Sciences122, e2500526122 (2025)
2025
-
[16]
L. Ren, N. Nama, J. M. McNeill, F. Soto, Z. Yan, W. Liu, W. Wang, J. Wang, and T. E. Mallouk, 3D steerable, acoustically powered microswimmers for single-particle manipulation, Science Advances5, eaax3084 (2019)
2019
-
[17]
Y. Deng, A. Paskert, Z. Zhang, R. Wittkowski, and D. Ahmed, An acoustically controlled helical microrobot, Science Advances9, eadh5260 (2023)
2023
-
[18]
Mahkam, M
N. Mahkam, M. C. Ugurlu, S. K. Kalva, A. Aghakhani, D. Razansky, and M. Sitti, Multiorifice acoustic mi- crorobot for boundary-free multimodal 3D swimming, Proceedings of the National Academy of Sciences122, e2417111122 (2025)
2025
-
[19]
Z. Shi, Z. Zhang, J. Schnermann, S. C. Neuhauss, N. Nama, R. Wittkowski, and D. Ahmed, Ultrasound- driven programmable artificial muscles, Nature646, 1096 (2025)
2025
-
[20]
Tasci, P
T. Tasci, P. Herson, K. Neeves, and D. Marr, Surface- enabled propulsion and control of colloidal microwheels, Nature communications7, 10225 (2016)
2016
-
[21]
T. Yang, B. Sprinkle, Y. Guo, J. Qian, D. Hua, A. Donev, D. W. Marr, and N. Wu, Reconfigurable microbots folded from simple colloidal chains, Proceedings of the National Academy of Sciences117, 18186 (2020)
2020
-
[22]
X. Hu, I. C. Yasa, Z. Ren, S. R. Goudu, H. Ceylan, W. Hu, and M. Sitti, Magnetic soft micromachines made of linked microactuator networks, Science Advances7, eabe8436 (2021)
2021
-
[23]
Z. Liu, M. Li, X. Dong, Z. Ren, W. Hu, and M. Sitti, Creating three-dimensional magnetic functional microde- vices via molding-integrated direct laser writing, Nature Communications13, 2016 (2022)
2016
-
[24]
H. Gu, E. Hanedan, Q. Boehler, T.-Y. Huang, A. J. Mathijssen, and B. J. Nelson, Artificial microtubules for rapid and collective transport of magnetic microcargoes, Nature Machine Intelligence4, 678 (2022)
2022
-
[25]
C. L. Smart, T. G. Pearson, Z. Liang, M. X. Lim, M. I. Abdelrahman, F. Monticone, I. Cohen, and P. L. McEuen, Magnetically programmed diffractive robotics, Science386, 1031 (2024)
2024
-
[26]
S. A. Abbasi, A. Ahmed, S. Noh, N. L. Gharamaleki, S. Kim, A. M. B. Chowdhury, J.-y. Kim, S. Pan´ e, B. J. Nelson, and H. Choi, Autonomous 3d positional control of a magnetic microrobot using reinforcement learning, Nature Machine Intelligence6, 92 (2024)
2024
-
[27]
Movassagh, K
T. Movassagh, K. H. Bui, H. Sakakibara, K. Oiwa, and T. Ishikawa, Nucleotide-induced global conformational changes of flagellar dynein arms revealed by in situ analy- sis, Nature structural & molecular biology17, 761 (2010)
2010
-
[28]
W. A. Catterall, G. Wisedchaisri, and N. Zheng, The con- formational cycle of a prototypical voltage-gated sodium channel, Nature chemical biology16, 1314 (2020)
2020
-
[29]
A. K. Kim and L. L. Porter, Functional and regulatory roles of fold-switching proteins, Structure29, 6 (2021)
2021
-
[30]
Praetorius, P
F. Praetorius, P. J. Leung, M. H. Tessmer, A. Broerman, C. Demakis, A. F. Dishman, A. Pillai, A. Idris, D. Juer- gens, J. Dauparas,et al., Design of stimulus-responsive two-state hinge proteins, Science381, 754 (2023)
2023
-
[31]
B. Jang, E. Gutman, N. Stucki, B. F. Seitz, P. D. Wendel- Garc´ ıa, T. Newton, J. Pokki, O. Ergeneman, S. Pan´ e, Y. Or,et al., Undulatory locomotion of magnetic multi- link nanoswimmers, Nano letters15, 4829 (2015)
2015
-
[32]
Y. Kim, H. Yuk, R. Zhao, S. A. Chester, and X. Zhao, Printing ferromagnetic domains for untethered fast- transforming soft materials, Nature558, 274 (2018)
2018
-
[33]
Cui, T.-Y
J. Cui, T.-Y. Huang, Z. Luo, P. Testa, H. Gu, X.-Z. Chen, B. J. Nelson, and L. J. Heyderman, Nanomagnetic encod- ing of shape-morphing micromachines, Nature575, 164 (2019)
2019
-
[34]
T. Xu, J. Zhang, M. Salehizadeh, O. Onaizah, and E. Diller, Millimeter-scale flexible robots with pro- grammable three-dimensional magnetization and mo- tions, Science Robotics4, eaav4494 (2019)
2019
-
[35]
H. Gu, Q. Boehler, H. Cui, E. Secchi, G. Savorana, C. De Marco, S. Gervasoni, Q. Peyron, T.-Y. Huang, S. Pane,et al., Magnetic cilia carpets with programmable metachronal waves, Nature communications11, 2637 10 (2020)
2020
-
[36]
Zhang, Z
J. Zhang, Z. Ren, W. Hu, R. H. Soon, I. C. Yasa, Z. Liu, and M. Sitti, Voxelated three-dimensional minia- ture magnetic soft machines via multimaterial heteroge- neous assembly, Science robotics6, eabf0112 (2021)
2021
-
[37]
Y. Dong, L. Wang, N. Xia, Z. Yang, C. Zhang, C. Pan, D. Jin, J. Zhang, C. Majidi, and L. Zhang, Untethered small-scale magnetic soft robot with programmable mag- netization and integrated multifunctional modules, Sci- ence Advances8, eabn8932 (2022)
2022
-
[38]
Ren and M
Z. Ren and M. Sitti, Design and build of small-scale magnetic soft-bodied robots with multimodal locomo- tion, Nature protocols19, 441 (2024)
2024
-
[39]
K. J. Dorsey, T. G. Pearson, E. Esposito, S. Russell, B. Bircan, Y. Han, M. Z. Miskin, D. A. Muller, I. Cohen, and P. L. McEuen, Atomic layer deposition for mem- branes, metamaterials, and mechanisms, Advanced Ma- terials31, 1901944 (2019)
2019
-
[40]
Liang, M
Z. Liang, M. X. Lim, Q.-Z. Zhu, F. Mottes, J. Z. Kim, L. Guttieres, C. Smart, T. Pearson, C. X. Du, M. Bren- ner,et al., Magnetic decoupling as a proofreading strat- egy for high-yield, time-efficient microscale self-assembly, Proceedings of the National Academy of Sciences122, e2502361122 (2025)
2025
-
[41]
E. M. Purcell, Life at low reynolds number, inPhysics and our world: reissue of the proceedings of a symposium in honor of Victor F Weisskopf(World Scientific, 2014) pp. 47–67
2014
-
[42]
Lauga, Life around the scallop theorem, Soft Matter 7, 3060 (2011)
E. Lauga, Life around the scallop theorem, Soft Matter 7, 3060 (2011)
2011
-
[43]
Shapere and F
A. Shapere and F. Wilczek, Geometry of self-propulsion at low reynolds number, Journal of Fluid Mechanics198, 557 (1989)
1989
-
[44]
Dreyfus, J
R. Dreyfus, J. Baudry, M. L. Roper, M. Fermigier, H. A. Stone, and J. Bibette, Microscopic artificial swimmers, Nature437, 862 (2005)
2005
-
[45]
I. S. Khalil, H. C. Dijkslag, L. Abelmann, and S. Misra, Magnetosperm: A microrobot that navigates using weak magnetic fields, Applied Physics Letters104(2014)
2014
-
[46]
T. Li, J. Li, H. Zhang, X. Chang, W. Song, Y. Hu, G. Shao, E. Sandraz, G. Zhang, L. Li,et al., Magnet- ically propelled fish-like nanoswimmers, Small12, 6098 (2016)
2016
-
[47]
Hanasoge, P
S. Hanasoge, P. J. Hesketh, and A. Alexeev, Microfluidic pumping using artificial magnetic cilia, Microsystems & nanoengineering4, 11 (2018)
2018
-
[48]
T. u. Islam, Y. Bellouard, and J. M. den Toonder, Highly motile nanoscale magnetic artificial cilia, Proceedings of the National Academy of Sciences118, e2104930118 (2021)
2021
-
[49]
W. Wang, Q. Liu, I. Tanasijevic, M. F. Reynolds, A. J. Cortese, M. Z. Miskin, M. C. Cao, D. A. Muller, A. C. Molnar, E. Lauga,et al., Cilia metasurfaces for electron- ically programmable microfluidic manipulation, Nature 605, 681 (2022)
2022
-
[50]
Zhang, X
S. Zhang, X. Hu, M. Li, U. Bozuyuk, R. Zhang, E. Suadiye, J. Han, F. Wang, P. Onck, and M. Sitti, 3d-printed micrometer-scale wireless magnetic cilia with metachronal programmability, Science Advances9, eadf9462 (2023)
2023
-
[51]
T. Yang, D. Hathcock, Y. Chen, P. L. McEuen, J. P. Sethna, I. Cohen, and I. Griniasty, Bifurcation instructed design of multistate machines, Proceedings of the Na- tional Academy of Sciences120, e2300081120 (2023)
2023
-
[52]
Chatzittofi, J
M. Chatzittofi, J. Agudo-Canalejo, and R. Golestanian, Mechanistic rules for de novo design of enzymes, Chem Catalysis (2025)
2025
-
[53]
M. Lim, Z. Liang, G. Alkuino, J. Kim, I. Griniasty, T. Zhang, P. McEuen, and I. Cohen, Multistable energy landscapes for adaptive microscopic machines [data], https://github.com/melodyxlim/micromachines (2026)
2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.