Recognition: unknown
Tethering and depth of submergence affect the swimming performance of undulatory robots
Pith reviewed 2026-05-07 13:45 UTC · model grok-4.3
The pith
Increasing submergence depth improves undulatory robot speed and efficiency by more than 10% by reducing wave drag.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
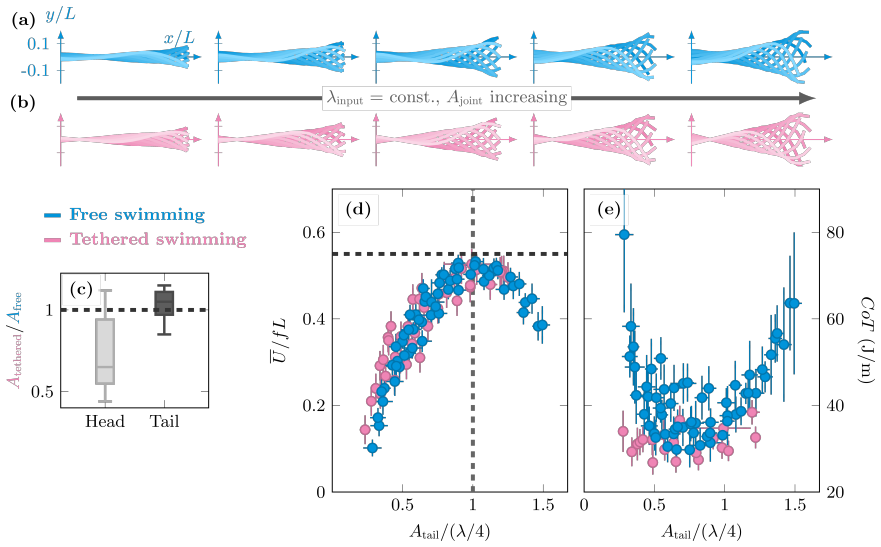
At the surface, tethered swimming achieves speeds comparable to free swimming but at a lower energetic cost attributed to the suppression of body roll. Increasing submergence depth to three body heights improves both maximum speed and energy efficiency by more than 10 percent relative to surface performance. Body kinematics stay unchanged when submerged, so the performance deficit near the surface is attributed to increased wave drag.
What carries the argument
The 1-guilla undulatory robot tested in free-pool and tethered-channel configurations at controlled depths, with performance measured by swimming speed, cost of transport, and body kinematics.
Load-bearing premise
The pool and channel environments are hydrodynamically equivalent except for the tether's suppression of roll, with no significant wall effects or extra tether drag.
What would settle it
Repeating the depth-variation tests in a much larger open tank without walls or tethers and checking whether the speed and efficiency gains remain above 10 percent would confirm or refute the wave-drag explanation.
Figures





read the original abstract
Over the past few decades, biomimetic robotic experiments have significantly advanced our understanding of undulatory swimming. Compared to animal experiments, robotic experiments offer repeatability and controlled parameter variations, but the robots operate under constraints that differ from those experienced by their natural counterparts. Freely swimming robots often remain on the surface, whereas most undulatory fish, including eels, are typically fully submerged during locomotion. Studies focusing on submerged swimming commonly rely on tethered robots to maintain depth control. This study examines the performance implications of surface versus submerged swimming, and tethered versus free swimming, using the robotic undulatory swimmer 1-guilla. The robot was tested in two configurations: free swimming in a pool and tethered swimming in a water channel at the surface and at varying depths down to three body heights. We varied kinematic input parameters and quantified performance in terms of swimming speed, cost of transport, and body kinematics. Our results reveal that at the surface, tethered swimming achieves speeds comparable to free swimming but at a lower energetic cost. This reduction in cost of transport is attributed to the suppression of body roll during tethered operation. Increasing submergence depth improved both the maximum speed and energy efficiency by more than 10% relative to the surface swimming performance. As the body kinematics remained unchanged when submerged, the performance deficit near the surface is attributed to increased wave drag. Overall, our findings provide explanations and insights into discrepancies in results obtained for tethered and free-swimming robotic studies, they highlight the hydrodynamic challenges of surface locomotion, and can help explain why natural undulatory swimmers predominantly favor submerged propulsion.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript experimentally compares an undulatory robotic swimmer (1-guilla) in free-swimming pool tests versus tethered swimming in a channel at the surface and at submergence depths up to three body heights. It reports that tethered surface swimming matches free-swimming speeds but with lower cost of transport due to roll suppression, while increasing depth yields >10% gains in maximum speed and energy efficiency relative to surface performance; these gains are attributed to reduced wave drag because measured body kinematics (amplitudes, frequencies, wavelengths) remain unchanged across depths.
Significance. If the central experimental comparisons hold after addressing methodological gaps, the work would provide concrete evidence on how free-surface proximity and tethering alter undulatory propulsion efficiency, helping reconcile discrepancies between tethered and free robotic studies and offering hydrodynamic rationale for why many natural undulatory swimmers avoid surface locomotion. The controlled variation of kinematic inputs and direct performance metrics (speed, cost of transport) add practical value for biomimetic design.
major comments (3)
- [Abstract] Abstract and results section: The attribution of the surface performance deficit solely to increased wave drag rests on the observation of unchanged body kinematics, but the manuscript provides no wave-elevation measurements, no decomposition of power into wave versus viscous components, and no control experiment (e.g., submerged baseline with artificial free-surface mimic) to isolate the mechanism from other free-surface effects such as modified near-body pressure fields or added-mass changes.
- [Methods] Methods and results: The central comparison mixes free-swimming data from a pool with tethered data from a channel; the manuscript does not quantify or control for potential depth-dependent confounds from channel walls, tether routing, or secondary flows, which could affect the reported >10% depth-dependent gains independently of wave drag.
- [Results] Results: The claims of >10% improvements in speed and efficiency, and the conclusion that kinematics are unchanged, are presented without error bars, number of trials, statistical tests, or raw data availability, undermining assessment of whether the differences are robust and load-bearing for the wave-drag interpretation.
minor comments (2)
- [Introduction] The robot designation '1-guilla' is introduced without a reference or brief description of its morphology and actuation, which would aid reproducibility.
- [Methods] Figure captions and methods should explicitly state how cost of transport is calculated (e.g., power source, units) and whether any filtering was applied to kinematic data.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments, which have helped us identify areas where the manuscript can be strengthened. We address each major comment point by point below, indicating the revisions we will incorporate.
read point-by-point responses
-
Referee: [Abstract] Abstract and results section: The attribution of the surface performance deficit solely to increased wave drag rests on the observation of unchanged body kinematics, but the manuscript provides no wave-elevation measurements, no decomposition of power into wave versus viscous components, and no control experiment (e.g., submerged baseline with artificial free-surface mimic) to isolate the mechanism from other free-surface effects such as modified near-body pressure fields or added-mass changes.
Authors: We acknowledge that the manuscript does not include direct wave-elevation measurements or a power decomposition, which would provide more definitive isolation of wave drag from other free-surface phenomena such as pressure-field modifications or added-mass variations. The interpretation relies on the measured invariance of body kinematics (amplitudes, frequencies, and wavelengths) across depths, which indicates that changes in performance are hydrodynamic rather than due to altered actuation. We will revise the abstract and results sections to state that the performance deficit is 'consistent with increased wave drag' rather than attributing it solely to this mechanism, and we will add a limitations paragraph noting the absence of direct wave data and recommending such measurements for future studies. No artificial free-surface control was performed, as the depth-variation series itself provides a graded control for surface proximity effects. revision: partial
-
Referee: [Methods] Methods and results: The central comparison mixes free-swimming data from a pool with tethered data from a channel; the manuscript does not quantify or control for potential depth-dependent confounds from channel walls, tether routing, or secondary flows, which could affect the reported >10% depth-dependent gains independently of wave drag.
Authors: The free-swimming experiments were performed in a large pool (dimensions to be specified in revision) to approximate unbounded conditions, while the tethered channel was used to enable precise depth control. We will expand the methods section to report channel width-to-body-length ratio, blockage factor, and tether attachment geometry, along with a brief analysis showing that wall-induced effects remain below 5% at the tested depths based on standard hydrodynamic blockage corrections. Visual inspection during experiments showed no observable secondary flows or tether-induced disturbances that varied systematically with depth. If additional quantitative estimates are required, we can include them in a revised supplementary note. revision: yes
-
Referee: [Results] Results: The claims of >10% improvements in speed and efficiency, and the conclusion that kinematics are unchanged, are presented without error bars, number of trials, statistical tests, or raw data availability, undermining assessment of whether the differences are robust and load-bearing for the wave-drag interpretation.
Authors: We agree that the current presentation lacks the necessary statistical detail. The underlying dataset consists of repeated trials per condition (typically 6–8 independent runs), and we will revise the results section and all relevant figures to include error bars (standard deviation or standard error), explicitly state the number of trials, and report the outcomes of appropriate statistical tests (e.g., one-way ANOVA with post-hoc comparisons) confirming that the >10% differences in speed and cost of transport are significant while kinematics show no significant depth dependence. Raw data files will be deposited in a public repository and referenced in the revised manuscript. revision: yes
Circularity Check
No circularity: purely experimental comparisons with direct measurements
full rationale
The paper reports measured swimming speeds, costs of transport, and body kinematics across free/tethered and surface/submerged conditions. The central attribution of surface deficit to wave drag rests on the empirical observation that kinematics are unchanged, which is a standard inference from data rather than a derivation, fit, or self-referential prediction. No equations, parameter fitting, or self-citation chains appear in the load-bearing claims. The result is self-contained against external benchmarks of robotic swimming experiments.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Wave drag increases near the free surface for undulatory bodies and is the dominant cause of performance loss when kinematics are unchanged
Reference graph
Works this paper leans on
-
[1]
Identification of the trade-off between speed and efficiency in undulatory swimming using a bio-inspired robot.Scientific Reports, pages 1–12, 2023
Alexandros Anastasiadis, Laura Paez, Eric Tytell, Auke Jan Ijspeert, and Karen Mulleners. Identification of the trade-off between speed and efficiency in undulatory swimming using a bio-inspired robot.Scientific Reports, pages 1–12, 2023. 12
2023
-
[2]
Eel-like robot swims more efficiently with increasing joint am- plitudes compared to constant joint amplitudes.Physical Review Fluids, 110509:3–6, 2024
Alexandros Anastasiadis, Annalisa Rossi, Laura Paez, Kamilo Melo, Eric D Tytell, Auke J Ijspeert, and Karen Mulleners. Eel-like robot swims more efficiently with increasing joint am- plitudes compared to constant joint amplitudes.Physical Review Fluids, 110509:3–6, 2024
2024
-
[3]
The Speed of Swimming of Fish as Related to Size and to the Frequency and Amplitude of the Tail Beat.Journal of Experimental Biology, 35(1):109–133, 1958
Richard Bainbridge. The Speed of Swimming of Fish as Related to Size and to the Frequency and Amplitude of the Tail Beat.Journal of Experimental Biology, 35(1):109–133, 1958
1958
-
[4]
Buckham, and Peter Oshkai
Oleksandr Barannyk, Bradley J. Buckham, and Peter Oshkai. On performance of an oscillating plate underwater propulsion system with variable chordwise flexibility at different depths of submergence.Journal of Fluids and Structures, 28:152–166, 2012
2012
-
[5]
Pascoal, and Auke J Ijspeert
Behzad Bayat, Naveena Crasta, Alessandro Crespi, Ant´ onio M. Pascoal, and Auke J Ijspeert. Environmental monitoring using autonomous vehicles: a survey of recent searching techniques. Current Opinion in Biotechnology, 45(645141):76–84, 2017
2017
-
[6]
Envirobot: A Bio-inspired environmental monitoring platform.Autonomous Underwater Vehicles 2016, AUV 2016, pages 381–386, 2016
Behzad Bayat, Alessandro Crespi, and Auke Ijspeert. Envirobot: A Bio-inspired environmental monitoring platform.Autonomous Underwater Vehicles 2016, AUV 2016, pages 381–386, 2016
2016
-
[7]
Berlinger, M
F. Berlinger, M. Saadat, H. Haj-Hariri, George V. Lauder, and R. Nagpal. Fish-like three- dimensional swimming with an autonomous, multi-fin, and biomimetic robot.Bioinspiration and Biomimetics, 16(2), 2021
2021
-
[8]
Biomimetics: lessons from nature–an overview.Philosophical Transactions of the Royal Society A: Mathematical, Physical and Engineering Sciences, 367(1893):1445–1486, 2009
Bharat Bhushan. Biomimetics: lessons from nature–an overview.Philosophical Transactions of the Royal Society A: Mathematical, Physical and Engineering Sciences, 367(1893):1445–1486, 2009
2009
-
[9]
L. D. Chambers, O. Akanyeti, R. Venturelli, J. Jezˇ ov, J. Brown, M. Kruusmaa, P. Fiorini, and W. M. Megill. A fish perspective: Detecting flow features while moving using an artificial lateral line in steady and unsteady flow.Journal of the Royal Society Interface, 11(99), 2014
2014
-
[10]
Society for Industrial and Applied Mathematics SIAM, Philadelphia, Pennsylvania, 3d ed
Samuel Daniel Conte and Carl De Boor.Elementary numerical analysis : an algorithmic ap- proach. Society for Industrial and Applied Mathematics SIAM, Philadelphia, Pennsylvania, 3d ed. edition, 2017
2017
-
[11]
Review of research and control technology of underwater bionic robots.Intelligent Marine Technology and Systems, 1(1):1–28, 2023
Zhongao Cui, Liao Li, Yuhang Wang, Zhiwei Zhong, and Junyang Li. Review of research and control technology of underwater bionic robots.Intelligent Marine Technology and Systems, 1(1):1–28, 2023
2023
-
[12]
Curet, Neelesh A
Oscar M. Curet, Neelesh A. Patankar, George V. Lauder, and Malcolm A. MacIver. Mechanical properties of a bio-inspired robotic knifefish with an undulatory propulsor.Bioinspiration and Biomimetics, 6(2), 2011
2011
-
[13]
A. Dode, R. Carmigniani, C. Cohen, C. Clanet, and L. Bocquet. Wave drag during an unsteady motion.Journal of Fluid Mechanics, 951:0–27, 2022
2022
-
[14]
Eidietis, T
L. Eidietis, T. L. Forrester, and P. W. Webb. Relative abilities to correct rolling disturbances of three morphologically different fish.Canadian Journal of Zoology, 80(12):2156–2163, 2002
2002
-
[15]
Epps and Alexandra H
Brenden P. Epps and Alexandra H. Techet. Impulse generated during unsteady maneuvering of swimming fish.Experiments in Fluids, 43(5):691–700, 2007
2007
-
[16]
Frank E. Fish. Advantages of aquatic animals as models for bio-inspired drones over present AUV technology.Bioinspiration and Biomimetics, 15(2), 2020
2020
-
[17]
Mahadevan
Mattia Gazzola, M´ ed´ eric Argentina, and L. Mahadevan. Scaling macroscopic aquatic locomo- tion.Nature Physics, 10(10):758–761, 2014
2014
-
[18]
Gemmell, Sean P
Brad J. Gemmell, Sean P. Colin, John H. Costello, and John O. Dabiri. Suction-based propulsion as a basis for efficient animal swimming.Nature Communications, 6:1–8, 2015
2015
-
[19]
Study of the thrust-drag balance with a swimming robotic fish.Physics of Fluids, 30(9), 2018
Florence Gibouin, Christophe Raufaste, Yann Bouret, and M´ ed´ eric Argentina. Study of the thrust-drag balance with a swimming robotic fish.Physics of Fluids, 30(9), 2018
2018
-
[20]
Nick Gravish and George V. Lauder. Robotics-inspired biology.Journal of Experimental Biology, 221(7):1–8, 2018. 13
2018
-
[21]
The Movement of Fish with Special Reference to the Eel.Studies in Animal Locomotion, 3:88–104, 1933
BY J Gray. The Movement of Fish with Special Reference to the Eel.Studies in Animal Locomotion, 3:88–104, 1933
1933
-
[22]
Standing on the Water: Stability Mechanisms of Snakes on Free Surface BT - Biomimetic and Biohybrid Systems
Johann Herault, ´Etienne Clement, Jonathan Brossillon, Seth LaGrange, Vincent Lebastard, and Frederic Boyer. Standing on the Water: Stability Mechanisms of Snakes on Free Surface BT - Biomimetic and Biohybrid Systems. In Vasiliki Vouloutsi, Anna Mura, Falk Tauber, Thomas Speck, Tony J Prescott, and Paul F M J Verschure, editors,Biomimetic and Biohybrid Sy...
2020
-
[23]
Petruska, Salvador Pan´ e, and Bradley J
Hen Wei Huang, Mahmut Selman Sakar, Andrew J. Petruska, Salvador Pan´ e, and Bradley J. Nelson. Soft micromachines with programmable motility and morphology.Nature Communica- tions, 7:1–10, 2016
2016
-
[24]
Huera-Huarte
Francisco J. Huera-Huarte. Pitching foil propulsion performance decays near the free surface. Ocean Engineering, 272(January), 2023
2023
-
[25]
Marcus Hultmark, Megan Leftwich, and Alexander J. Smits. Flowfield measurements in the wake of a robotic lamprey, 2010
2010
-
[26]
Vogt, Robert J
Ardian Jusufi, Daniel M. Vogt, Robert J. Wood, and George V. Lauder. Undulatory Swimming Performance and Body Stiffness Modulation in a Soft Robotic Fish-Inspired Physical Model. Soft robotics, 4(3):202–210, 2017
2017
-
[27]
Katzschmann, Joseph DelPreto, Robert MacCurdy, and Daniela Rus
Robert K. Katzschmann, Joseph DelPreto, Robert MacCurdy, and Daniela Rus. Exploration of underwater life with an acoustically controlled soft robotic fish.Science Robotics, 3(16):1–13, 2018
2018
-
[28]
King and Melissa A
Justin T. King and Melissa A. Green. The influence of trailing edge shape on the wake circulation and time-averaged wake of bio-inspired pitching panels.Experiments in Fluids, 64(6):1–17, 2023
2023
-
[29]
Lauder, Erik J
George V. Lauder, Erik J. Anderson, James Tangorra, and Peter G.A. Madden. Fish biorobotics: Kinematics and hydrodynamics of self-propulsion.Journal of Experimental Bi- ology, 210(16):2767–2780, 2007
2007
-
[30]
Leftwich, Eric D
Megan C. Leftwich, Eric D. Tytell, Avis H. Cohen, and Alexander J. Smits. Wake structures behind a swimming robotic lamprey with a passively flexible tail.Journal of Experimental Biology, 215(3):416–425, 2012
2012
-
[31]
Graving, Joseph Bak-Coleman, Guangming Xie, and Iain D
Liang Li, M´ at´ e Nagy, Jacob M. Graving, Joseph Bak-Coleman, Guangming Xie, and Iain D. Couzin. Vortex phase matching as a strategy for schooling in robots and in fish.Nature Communications, 11(1):1–9, 2020
2020
-
[32]
Liang Li, Sridhar Ravi, Guangming Xie, and Iain D. Couzin. Using a robotic platform to study the influence of relative tailbeat phase on the energetic costs of side-by-side swimming in fish.Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences, 477(2249), 2021
2021
-
[33]
M. J. Lighthill. Aquatic animal propulsion of high hydromechanical efficiency.Journal of Fluid Mechanics, 44(2):265–301, 1970
1970
-
[34]
Loring, Luca Zunino, Kaitlyn E
Xiangxiao Liu, Matthew D. Loring, Luca Zunino, Kaitlyn E. Fouke, Fran¸ cois A. Longchamp, Alexandre Bernardino, Auke J. Ijspeert, and Eva A. Naumann. Artificial embodied cir- cuits uncover neural architectures of vertebrate visuomotor behaviors.Science Robotics, 10(107):eadv4408, 2025
2025
-
[35]
Manfredi, T
L. Manfredi, T. Assaf, S. Mintchev, S. Marrazza, L. Capantini, S. Orofino, L. Ascari, S. Grillner, P. Wall´ en,¨O Ekeberg, C. Stefanini, and P. Dario. A bioinspired autonomous swimming robot as a tool for studying goal-directed locomotion.Biological Cybernetics, 107(5):513–527, 2013
2013
-
[36]
Self-exploring automated experiments for discovery, optimization, and control of unsteady vortex-dominated flow phenomena.Physical Review Fluids, 9(12):124701, 2024
Karen Mulleners. Self-exploring automated experiments for discovery, optimization, and control of unsteady vortex-dominated flow phenomena.Physical Review Fluids, 9(12):124701, 2024
2024
-
[37]
Patankar
Nishant Nangia, Rahul Bale, Nelson Chen, Yohanna Hanna, and Neelesh A. Patankar. Optimal specific wavelength for maximum thrust production in undulatory propulsion.PLoS ONE, 12(6):1–23, 2017. 14
2017
-
[38]
Mathieu Porez, Fr´ ed´ eric Boyer, and Auke Jan Ijspeert. Improved lighthill fish swimming model for bio-inspired robots: Modeling, computational aspects and experimental comparisons.Inter- national Journal of Robotics Research, 33(10):1322–1341, sep 2014
2014
-
[39]
Quinn, George V
Daniel B. Quinn, George V. Lauder, and Alexander J. Smits. Maximizing the efficiency of a flexible propulsor using experimental optimization.Journal of Fluid Mechanics, 767:430–448, 2015
2015
-
[40]
The neuromechanics of animal locomotion: From biology to robotics and back.Science Robotics, 8(78):eadg0279, 2023
Pavan Ramdya and Auke Jan Ijspeert. The neuromechanics of animal locomotion: From biology to robotics and back.Science Robotics, 8(78):eadg0279, 2023
2023
-
[41]
Event-based reconstruction of time-resolved centreline deformation of flapping flags.Measurement Science and Technology, 36(4), 2025
Ga´ etan Raynaud and Karen Mulleners. Event-based reconstruction of time-resolved centreline deformation of flapping flags.Measurement Science and Technology, 36(4), 2025
2025
-
[42]
Flow-relative control of an underwater robot.Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences, 469(2153), 2013
Taavi Salum¨ ae and Maarja Kruusmaa. Flow-relative control of an underwater robot.Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences, 469(2153), 2013
2013
-
[43]
S´ anchez-Rodr´ ıguez, F
J. S´ anchez-Rodr´ ıguez, F. Celestini, C. Raufaste, and M. Argentina. Proprioceptive Mechanism for Bioinspired Fish Swimming.Physical Review Letters, 126(23):234501, 2021
2021
-
[44]
Wainwright, Otar Akanyeti, James C
Valentina Di Santo, Elsa Goerig, Dylan K. Wainwright, Otar Akanyeti, James C. Liao, Theodore Castro-Santos, and George V. Lauder. Convergence of undulatory swimming kinematics across a diversity of fishes.Proceedings of the National Academy of Sciences of the United States of America, 118(49):1–9, 2021
2021
-
[45]
Shepard, Rory P
Emily L.C. Shepard, Rory P. Wilson, Flavio Quintana, Agustina G´ omez Laich, Nikolai Liebsch, Diego A. Albareda, Lewis G. Halsey, Adrian Gleiss, David T. Morgan, Andrew E. Myers, Chris Newman, and David W. Macdonald. Identification of animal movement patterns using tri-axial accelerometry.Endangered Species Research, 10(1):47–60, 2010
2010
-
[46]
Alexander J. Smits. Undulatory and oscillatory swimming.Journal of Fluid Mechanics, 2019
2019
-
[47]
Sverdrup-Thygeson, E
J. Sverdrup-Thygeson, E. Kelasidi, K. Y. Pettersen, and J. T. Gravdahl. The underwater swimming manipulator - A bio-inspired AUV.Autonomous Underwater Vehicles 2016, AUV 2016, pages 387–395, 2016
2016
-
[48]
Ijspeert
Robin Thandiackal, Kamilo Melo, Laura Paez, Johann Herault, Takeshi Kano, Kyoichi Akiyama, Fr´ ed´ eric Boyer, Dimitri Ryczko, Akio Ishiguro, and Auke J. Ijspeert. Emergence of robust self- organized undulatory swimming based on local hydrodynamic force sensing.Science Robotics, 6(57), 2021
2021
-
[49]
Triantafyllou, G
Michael S. Triantafyllou, G. S. Triantafyllou, and D. K. P. Yue. Ydrodynamics of Fishlike Swimming.Annual Review of Fluid Mechanics, 32:33–53, 2000
2000
-
[50]
Triantafyllou, Gabriel D
Michael S. Triantafyllou, Gabriel D. Weymouth, and Jianmin Miao. Biomimetic Survival Hy- drodynamics and Flow Sensing.Annual Review of Fluid Mechanics, 48(July 2015):1–24, 2016
2015
-
[51]
Triantafyllou Triantafyllou and George S
Michael S. Triantafyllou Triantafyllou and George S. An Effcient Swimming Machine.Scientific American, 272(3):64–70, 1995
1995
-
[52]
Eric D. Tytell. The hydrodynamics of eel swimming II. Effect of swimming speed.Journal of Experimental Biology, 207(19):3265–3279, 2004
2004
-
[53]
M¨ uller, Ronald Booms, Ep Eding, Johan Verreth, and Guido Van Den Thillart
Vincent Van Ginneken, Erik Antonissen, Ulrike K. M¨ uller, Ronald Booms, Ep Eding, Johan Verreth, and Guido Van Den Thillart. Eel migration to the Sargasso: Remarkably high swim- ming efficiency and low energy costs.Journal of Experimental Biology, 208(7):1329–1335, 2005
2005
-
[54]
Videler.Fish Swimming
John J. Videler.Fish Swimming. Springer Dordrecht, 1993
1993
-
[55]
Wainwright and George V
Dylan K. Wainwright and George V. Lauder. Tunas as a high-performance fish platform for inspiring the next generation of autonomous underwater vehicles.Bioinspiration and Biomimet- ics, 15(3), 2020
2020
-
[56]
P. W. Webb. The effect of size on the fast-start performance of rainbow trout Salmo cairdneri, and a consideration of piscivorous predator-prey interactions.Journal of Experimental Biology, 65(1):157–177, 1976. 15
1976
-
[57]
P. W. Webb, D. Sims, and W. W. Schultz. The effects of an air/water surface on the fast- start performance of rainbow trout (Oncorhynchus mykiss).Journal of Experimental Biology, 155:219–226, 1991
1991
-
[58]
Paul W. Webb. Control of posture, depth, and swimming trajectories of fishes.Integrative and Comparative Biology, 42(1):94–101, 2002
2002
-
[59]
White, George V
Carl H. White, George V. Lauder, and Hilary Bart-Smith. Tunabot Flex: A tuna-inspired robot with body flexibility improves high-performance swimming.Bioinspiration and Biomimetics, 16(2), 2021
2021
-
[60]
Development of a novel robotic dolphin and its application to water quality monitoring.IEEE/ASME Transactions on Mechatronics, 22(5):2130–2140, 2017
Zhengxing Wu, Jincun Liu, Junzhi Yu, and Hao Fang. Development of a novel robotic dolphin and its application to water quality monitoring.IEEE/ASME Transactions on Mechatronics, 22(5):2130–2140, 2017
2017
-
[61]
Xiao Xie, Johann Herault, Vincent Lebastard, and Frederic Boyer. Recursive inverse dynamics of a swimming snake-like robot with a tree-like mechanical structure.Proceedings of IEEE Workshop on Advanced Robotics and its Social Impacts, ARSO, 2023-June:65–70, 2023
2023
-
[62]
Parametric Research of Experiments on a Carangiform Robotic Fish.Journal of Bionic Engineering, 5(2):95–101, 2008
Qin Yan, Zhen Han, Shi wu Zhang, and Jie Yang. Parametric Research of Experiments on a Carangiform Robotic Fish.Journal of Bionic Engineering, 5(2):95–101, 2008
2008
-
[63]
Artificial lateral line based local sensing between two adjacent robotic fish.Bioinspiration and Biomimetics, 13(1), 2018
Xingwen Zheng, Chen Wang, Ruifeng Fan, and Guangming Xie. Artificial lateral line based local sensing between two adjacent robotic fish.Bioinspiration and Biomimetics, 13(1), 2018
2018
-
[64]
Zhong, J
Q. Zhong, J. Zhu, F. E. Fish, S. J. Kerr, A. M. Downs, H. Bart-Smith, and D. B. Quinn. Tunable stiffness enables fast and efficient swimming in fish-like robots.Science Robotics, 6(57), 2021
2021
-
[65]
J. Zhu, C. White, D. K. Wainwright, V. Di Santo, G. V. Lauder, and H. Bart-Smith. Tuna robotics: A high-frequency experimental platform exploring the performance space of swimming fishes.Science Robotics, 4(34), 2019
2019
-
[66]
Selection of mems accelerometers for tilt measurements.Journal of Sensors, 2017(1):9796146, 2017
Sergiusz Luczak, Robert Grepl, and Maciej Bodnicki. Selection of mems accelerometers for tilt measurements.Journal of Sensors, 2017(1):9796146, 2017. 16
2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.