Recognition: 2 theorem links
· Lean TheoremPropSplat: Map-Free RF Field Reconstruction via 3D Gaussian Propagation Splatting
Pith reviewed 2026-05-11 02:09 UTC · model grok-4.3
The pith
PropSplat reconstructs accurate site-specific RF fields from sparse signal measurements alone, without maps or geographic data.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
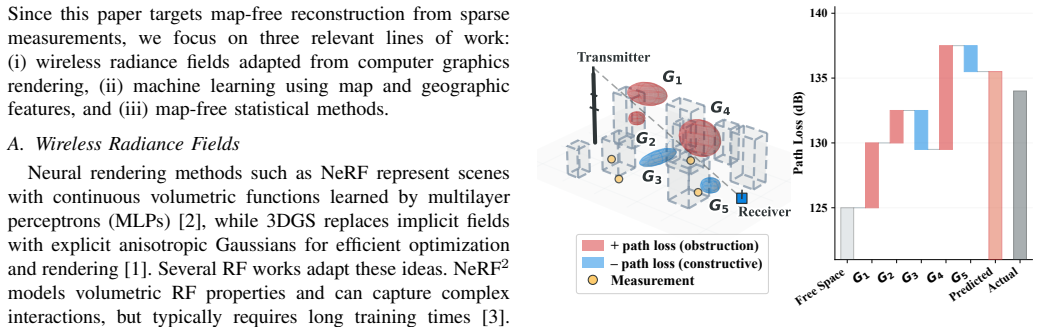
PropSplat represents propagation effects through 3D anisotropic Gaussian primitives. Each primitive stores a scalar offset to an explicit baseline path-loss model whose exponent is learned during optimization. The primitives are initialized exclusively along observed transmitter-receiver trajectories and adjusted solely against sparse received-signal-strength values, with no external geographic, clutter, or floor-plan information supplied.
What carries the argument
3D anisotropic Gaussian primitives that add learned scalar offsets to a baseline path-loss model, initialized along observed paths and optimized end-to-end against sparse signal-strength data.
If this is right
- Sparse outdoor drive-test measurements spaced 300 m apart produce 5.38 dB RMSE across multiple frequencies and terrain types.
- Indoor Bluetooth measurements yield 0.19 m mean localization error, an order of magnitude lower than competing wireless radiance-field approaches.
- No floor plans, terrain databases, or clutter maps are required at any stage of training or inference.
- The same representation supports both field prediction and receiver localization tasks within one optimization.
Where Pith is reading between the lines
- The method could be extended to update models in real time by adding new measurement paths as they become available.
- Because only RF-native data are used, the approach may integrate directly with crowdsourced signal reports from mobile devices.
- If the Gaussian primitives can be made differentiable with respect to frequency, the same framework might predict behavior across bands without retraining.
Load-bearing premise
A modest set of 3D anisotropic Gaussians placed only along measured paths and tuned to sparse signal-strength readings can capture the main propagation behavior of an unknown environment.
What would settle it
Apply the method to a new environment containing many small reflective surfaces or sharp terrain changes not aligned with the initial path lines; if the resulting RMSE on held-out measurements exceeds that of a conventional ray-tracing model that uses an accurate 3D map, the core claim is falsified.
Figures



read the original abstract
Building a site-specific propagation model typically requires either ray-tracing over detailed 3D maps or dense measurement campaigns. Both approaches are expensive and often infeasible for rapid deployments where geographic data is unavailable or outdated. We present PropSplat, a map-free propagation modeling method that reconstructs radio frequency (RF) fields using 3D anisotropic Gaussian primitives. Each Gaussian encodes a scalar path loss offset relative to an explicit baseline path loss model with a learnable path loss exponent. Gaussians are initialized along observed transmitter--receiver paths and optimized end-to-end to learn the propagation environment without external information like floor plans, terrain databases, or clutter data. We evaluate PropSplat against wireless radiance field methods NeRF$^2$, GSRF, and WRF-GS+ on two real-world datasets. On large-scale outdoor drive-tests spanning multiple topographical regions at six sub-6 GHz frequencies, PropSplat achieves 5.38 dB RMSE when training measurements are spaced 300m apart and outperforms WRF-GS+ (5.87 dB), GSRF (7.46 dB), and NeRF$^2$ (14.76 dB). On indoor Bluetooth Low Energy measurements, PropSplat achieves 0.19m mean localization error, an order of magnitude better than NeRF$^2$ (1.84m), while achieving near-identical received signal strength prediction accuracy. These results show that accurate site-specific propagation reconstruction is achievable from sparse RF-native measurements. The need for geographic data as a prerequisite for scalable RF environment modeling is reduced.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces PropSplat, a map-free RF propagation modeling technique that represents the environment using 3D anisotropic Gaussian primitives. Each Gaussian encodes a scalar path-loss offset relative to an explicit baseline model whose exponent is learned from data. Primitives are initialized exclusively along observed Tx-Rx paths and optimized end-to-end against sparse received-signal-strength measurements. On large-scale outdoor drive-test data at six sub-6 GHz frequencies with 300 m measurement spacing, the method reports 5.38 dB RMSE, outperforming WRF-GS+ (5.87 dB), GSRF (7.46 dB), and NeRF² (14.76 dB). On indoor BLE data it achieves 0.19 m mean localization error while matching RSS prediction accuracy of prior methods.
Significance. If substantiated, the approach would meaningfully reduce reliance on geographic data for site-specific RF modeling, enabling faster deployment in environments where maps are unavailable or stale. The quantitative gains on real-world outdoor and indoor datasets indicate practical potential for scalable, measurement-driven propagation reconstruction.
major comments (2)
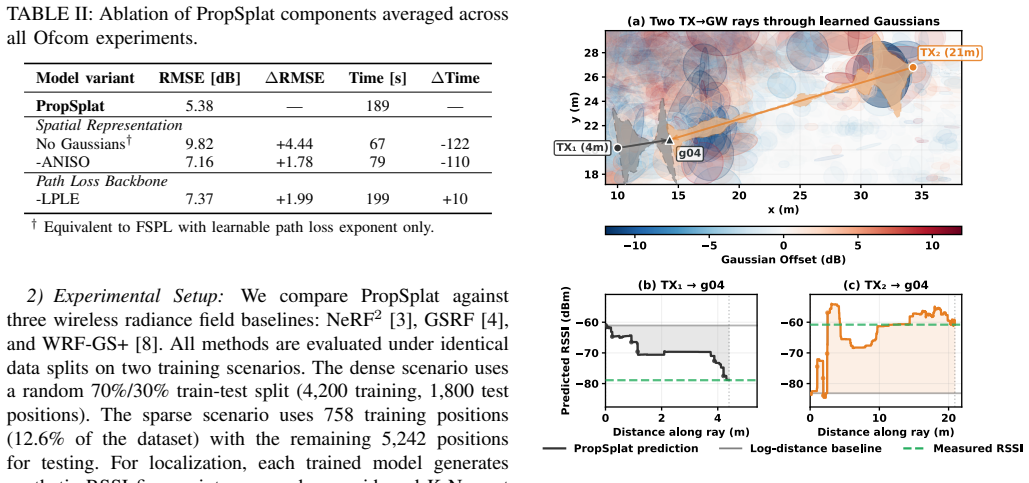
- [§3.2] §3.2 (Gaussian initialization and optimization): Gaussians are placed only along observed Tx-Rx paths. The manuscript must demonstrate, via explicit off-path metrics or visualizations, that the anisotropic splatting kernels produce site-specific deviations from the baseline model in unsampled volumes; otherwise the reconstruction reduces to the learnable-exponent baseline and the map-free claim is not fully supported.
- [Table 1, §4.1] Table 1 and §4.1 (quantitative results): The reported 5.38 dB RMSE and comparisons to baselines lack error bars, standard deviations across runs, or ablation studies on Gaussian count, initialization density, and exponent learning. These omissions make it impossible to judge whether the 0.49 dB improvement over WRF-GS+ is statistically reliable or sensitive to optimization details.
minor comments (3)
- [Eq. 3] Notation for the path-loss offset inside each Gaussian (Eq. 3) is introduced without a clear link to the final field reconstruction formula; a single consolidated equation would improve readability.
- [§4.2] The indoor localization experiment reports mean error but does not specify the number of test points or the exact train/test split used for the 0.19 m figure.
- [Figure 4] Figure 4 caption should explicitly state the measurement spacing and frequency band shown, rather than referring only to 'drive-test data'.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments. We address each major point below, providing our response and indicating the revisions we will make to the manuscript.
read point-by-point responses
-
Referee: [§3.2] §3.2 (Gaussian initialization and optimization): Gaussians are placed only along observed Tx-Rx paths. The manuscript must demonstrate, via explicit off-path metrics or visualizations, that the anisotropic splatting kernels produce site-specific deviations from the baseline model in unsampled volumes; otherwise the reconstruction reduces to the learnable-exponent baseline and the map-free claim is not fully supported.
Authors: We agree that explicit evidence of off-path generalization is necessary to fully support the map-free claim. While the end-to-end optimization of anisotropic Gaussians against sparse RSS measurements inherently allows the model to learn volumetric deviations (as evidenced by the 0.49 dB RMSE improvement over WRF-GS+ and larger gains over other baselines on held-out data), we will strengthen the manuscript by adding visualizations of the reconstructed RF field in unsampled volumes away from Tx-Rx paths. We will also include quantitative off-path metrics, such as RMSE computed on a subset of test measurements not used for initialization, comparing the full PropSplat model against the learnable-exponent baseline alone. These additions will directly illustrate the site-specific effects captured by the splatting kernels. revision: yes
-
Referee: [Table 1, §4.1] Table 1 and §4.1 (quantitative results): The reported 5.38 dB RMSE and comparisons to baselines lack error bars, standard deviations across runs, or ablation studies on Gaussian count, initialization density, and exponent learning. These omissions make it impossible to judge whether the 0.49 dB improvement over WRF-GS+ is statistically reliable or sensitive to optimization details.
Authors: We acknowledge that the absence of statistical measures and ablations limits the ability to assess robustness. In the revised manuscript, we will augment Table 1 with error bars showing the standard deviation of RMSE over multiple optimization runs (e.g., 5 random seeds). We will also expand §4.1 with ablation studies examining the sensitivity to Gaussian count, initialization density along observed paths, and the contribution of learning the path-loss exponent versus fixing it. These results will confirm that the reported improvements are statistically reliable and not artifacts of specific hyperparameter choices. revision: yes
Circularity Check
No significant circularity; derivation is self-contained data-driven optimization
full rationale
The paper presents PropSplat as an optimization procedure that initializes 3D anisotropic Gaussians along observed Tx-Rx paths and fits both the Gaussians' offsets and a single learnable path-loss exponent directly to sparse RF measurements. This is a standard supervised fitting process whose outputs on held-out test locations are not forced by construction to equal the training inputs; the model must generalize via the splatting kernels. No self-citation is invoked as a load-bearing uniqueness theorem, no ansatz is smuggled from prior author work, and no known empirical pattern is merely renamed. The central claim therefore rests on empirical performance numbers rather than definitional equivalence.
Axiom & Free-Parameter Ledger
free parameters (1)
- path loss exponent
axioms (1)
- domain assumption Environmental propagation effects can be captured by additive scalar offsets encoded in 3D anisotropic Gaussians placed along observed paths.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Each Gaussian encodes a scalar path loss offset relative to an explicit baseline path loss model with a learnable path loss exponent. Gaussians are initialized along observed transmitter–receiver paths and optimized end-to-end
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
3D anisotropic Gaussian primitives... anisotropic shapes capture directional propagation effects
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
https://doi.org/10.1145/3592433 Xiaonan Kong and Riley G
B. Kerbl, G. Kopanas, T. Leimkuehler, and G. Drettakis, “3d gaussian splatting for real-time radiance field rendering,”ACM Trans. Graph., vol. 42, no. 4, Jul. 2023. [Online]. Available: https://doi.org/10.1145/3592433
-
[2]
B. Mildenhall, P. P. Srinivasan, M. Tancik, J. T. Barron, R. Ramamoorthi, and R. Ng, “Nerf: representing scenes as neural radiance fields for view synthesis,”Commun. ACM, vol. 65, no. 1, p. 99–106, Dec. 2021. [Online]. Available: https://doi.org/10.1145/3503250
-
[3]
Nerf2: Neural radio-frequency radiance fields,
X. Zhao, Z. An, Q. Pan, and L. Yang, “Nerf2: Neural radio-frequency radiance fields,” inProceedings of the 29th Annual International Conference on Mobile Computing and Networking, ser. ACM MobiCom ’23. New York, NY , USA: Association for Computing Machinery,
-
[4]
Available: https://doi.org/10.1145/3570361.3592527
[Online]. Available: https://doi.org/10.1145/3570361.3592527
-
[5]
GSRF: Complex-valued 3d gaussian splatting for efficient radio-frequency data synthesis,
K. Yang, G. Dong, S. JI, W. Du, and M. Srivastava, “GSRF: Complex-valued 3d gaussian splatting for efficient radio-frequency data synthesis,” inThe Thirty-ninth Annual Conference on Neural Information Processing Systems, 2025. [Online]. Available: https://openreview.net/forum?id=E3oNDQ8e9r
work page 2025
-
[6]
Active sampling and gaus- sian reconstruction for radio frequency radiance field,
C.-S. Gau, X. Chen, T. Javidi, and X. Zhang, “Active sampling and gaus- sian reconstruction for radio frequency radiance field,”arXiv preprint arXiv:2412.08003, 2024
-
[7]
Rfcanvas: Modeling rf channel by fusing visual priors and few-shot rf measurements,
X. Chen, Z. Feng, K. Sun, K. Qian, and X. Zhang, “Rfcanvas: Modeling rf channel by fusing visual priors and few-shot rf measurements,” in Proceedings of the 22nd ACM Conference on Embedded Networked Sensor Systems, ser. SenSys ’24. New York, NY , USA: Association for Computing Machinery, 2024, p. 464–477. [Online]. Available: https://doi.org/10.1145/36660...
-
[8]
Wrf-gs: Wireless radiation field reconstruction with 3d gaussian splatting,
C. Wen, J. Tong, Y . Hu, Z. Lin, and J. Zhang, “Wrf-gs: Wireless radiation field reconstruction with 3d gaussian splatting,” inIEEE INFOCOM 2025 - IEEE Conference on Computer Communications, 2025, pp. 1– 10
work page 2025
-
[9]
Neural representation for wireless radiation field reconstruction: A 3d gaussian splatting approach,
——, “Neural representation for wireless radiation field reconstruction: A 3d gaussian splatting approach,”IEEE Transactions on Wireless Communications, vol. 25, pp. 7490–7504, 2026
work page 2026
-
[10]
Laik: Location-specific analysis to infer key performance indicators,
R. Enami, S. Gupta, D. Rajan, and J. Camp, “Laik: Location-specific analysis to infer key performance indicators,”IEEE Transactions on Vehicular Technology, vol. 70, no. 5, pp. 4406–4418, 2021
work page 2021
-
[11]
Machine learning-based path loss model- ing with simplified features,
J. Ethier and M. Ch ˆateauvert, “Machine learning-based path loss model- ing with simplified features,”IEEE Antennas and Wireless Propagation Letters, 2024
work page 2024
-
[12]
Map-based path loss prediction in multiple cities using convolutional neural networks,
R. G. Dempsey, J. Ethier, and H. Yanikomeroglu, “Map-based path loss prediction in multiple cities using convolutional neural networks,”IEEE Antennas and Wireless Propagation Letters, 2025
work page 2025
-
[13]
Application of machine learning for radiowave propagation modelling below 6 ghz,
M. Z. Bocus and A. Lodhi, “Application of machine learning for radiowave propagation modelling below 6 ghz,”IEEE Access, 2025
work page 2025
-
[14]
H.-S. Jo, C. Park, E. Lee, H. K. Choi, and J. Park, “Path loss prediction based on machine learning techniques: Principal component analysis, artificial neural network, and gaussian process,”Sensors, vol. 20, no. 7,
-
[15]
Available: https://www.mdpi.com/1424-8220/20/7/1927
[Online]. Available: https://www.mdpi.com/1424-8220/20/7/1927
work page 1927
-
[16]
Recursive estimation of dynamic rss fields based on crowdsourcing and gaussian processes,
I. Santos, J. J. Murillo-Fuentes, and P. M. Djuri ´c, “Recursive estimation of dynamic rss fields based on crowdsourcing and gaussian processes,” IEEE Transactions on Signal Processing, vol. 67, no. 5, pp. 1152–1162, 2019
work page 2019
-
[17]
Uk radiowave propagation measurement data for frequencies below 6 ghz,
Ofcom, “Uk radiowave propagation measurement data for frequencies below 6 ghz,” Office of Communications (Ofcom), Tech. Rep., Aug. 2019, accessed: 2025-05-06. [Online]. Available: https://www.ofcom.org.uk/siteassets/resources/documents/spectrum/uk- radiowave-propagation-measurement/sub-6ghz-propagation- measurement-data.pdf?v=324106
work page 2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.