Recognition: no theorem link
An Open-Source Framework for Coupled Vehicle-Bridge Interaction Analysis Using OpenSees
Pith reviewed 2026-05-12 02:55 UTC · model grok-4.3
The pith
An open-source Python framework couples separate OpenSees vehicle and bridge subsystems through iterative force-displacement exchange at each time step.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
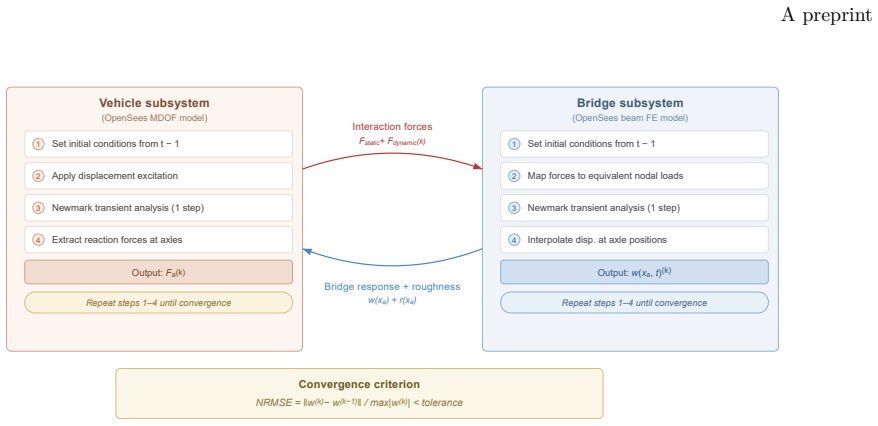
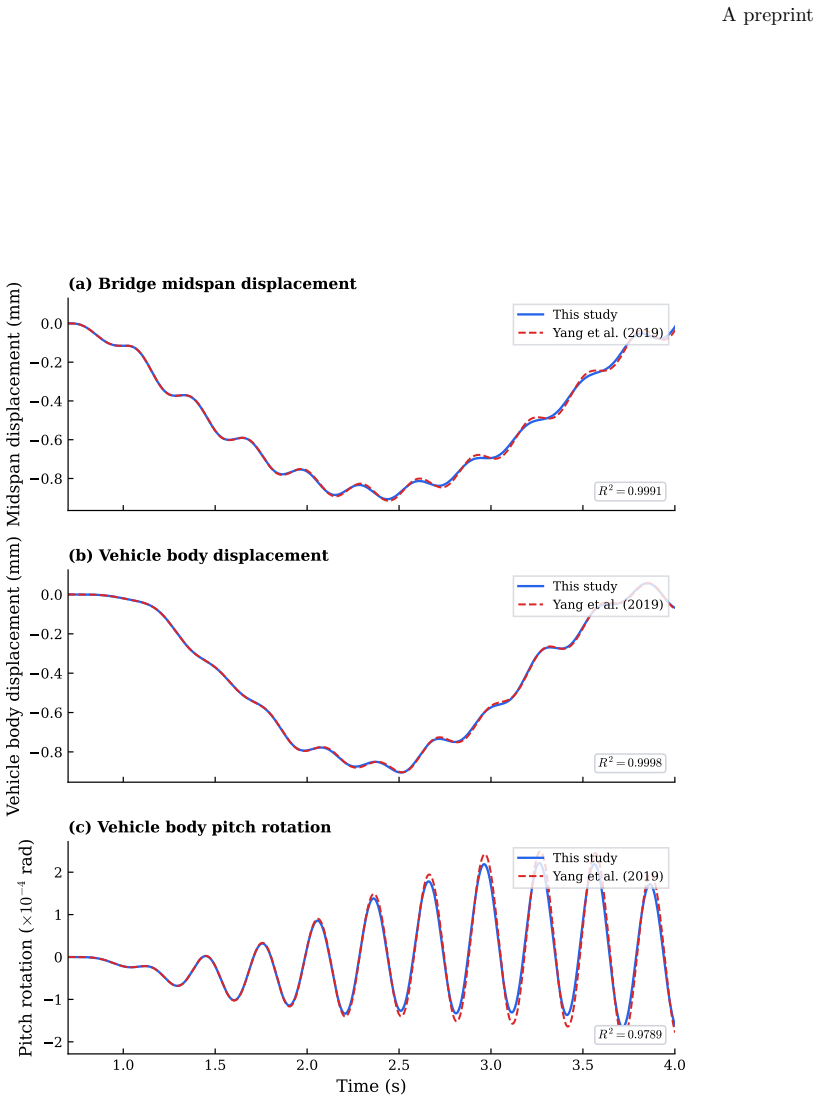
The central claim is that an open-source framework built on OpenSees can perform coupled vehicle-bridge interaction simulations by treating the vehicle and bridge as separate subsystems linked by an iterative coupling algorithm. At each time step the algorithm passes current displacements from the bridge to the vehicle and forces from the vehicle back to the bridge until both converge. The same framework also supplies a decoupled mode in which the vehicle applies only its static weight as a moving load and the resulting bridge motion then drives the vehicle as base excitation. Validation against quarter-car, half-car with pitch, and full composite benchmarks confirms close numerical match, R
What carries the argument
The iterative coupling scheme that exchanges displacement and force values between separate OpenSees vehicle and bridge subsystems until convergence at every time step.
If this is right
- The framework enables reproducible studies of dynamic amplification factors under moving loads without writing custom finite-element solvers.
- Researchers can select among five vehicle models to match the fidelity needed for weigh-in-motion or indirect monitoring applications.
- The parametric study supplies concrete thresholds on mass ratio, speed, and roughness that indicate when the decoupled mode remains sufficiently accurate.
- Full coupling is required only when vehicle-to-bridge mass ratio or road roughness exceeds the identified limits, otherwise the simpler mode suffices.
- Release of the complete code and benchmark configurations allows direct reuse and extension by other groups.
- pith_inferences
Load-bearing premise
The iterative coupling scheme between the vehicle and bridge OpenSees subsystems converges reliably without numerical artifacts for the modeled vehicle and bridge configurations.
What would settle it
Running the framework on an instrumented bridge under a controlled vehicle passage and comparing the computed dynamic responses against measured strains and accelerations would show whether the coupling reproduces real behavior within engineering tolerances.
Figures














read the original abstract
Vehicle-bridge interaction (VBI) is important for simulating bridge response under moving vehicular loads and supports applications such as dynamic amplification studies, weigh-in-motion, and indirect bridge monitoring. Although VBI theory is well established, many existing implementations use custom finite element code or research-specific solvers, which limits their reuse. This paper presents an open-source Python framework for VBI analysis built on OpenSees. The bridge and vehicle are modeled as separate OpenSees subsystems and connected through an iterative scheme that exchanges displacement and force values at each time step until convergence. Five vehicle model types are supported, from a single axle spring-mass system to two-axle composite half-cars with body pitch and separate tyre and suspension elements. A decoupled mode is also provided: the vehicle static weight is applied as a moving load on the bridge, and the resulting bridge motion is then used as base excitation for the vehicle. Validation against three published benchmarks (quarter-car, half-car with pitch, and full composite models) shows close agreement, with R2 above 0.998 in all cases. A parametric study reports the accuracy of the decoupled mode as a function of vehicle-to-bridge mass ratio, span length, speed, road roughness class, and background traffic density, and indicates when the decoupled mode is adequate and when full coupling is needed. The complete framework and benchmark configurations are released as open-source software to support reproducible research in vehicle-bridge dynamics.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript describes an open-source Python framework for coupled vehicle-bridge interaction (VBI) analysis implemented in OpenSees. The bridge and vehicle are treated as independent subsystems linked by an iterative fixed-point scheme that exchanges interface displacements and forces until convergence at each time step. Five vehicle models of increasing complexity are supported, along with an optional decoupled mode that applies static vehicle weight as a moving load. The framework is validated on three published VBI benchmarks (quarter-car, half-car, and composite models), yielding R² > 0.998 agreement in all cases. A parametric study quantifies the error introduced by the decoupled approximation as a function of mass ratio, span, speed, roughness, and traffic density. All code and benchmark setups are released publicly.
Significance. If the iterative coupling implementation is correct and robust, the paper delivers a practical, reusable tool that can accelerate research in vehicle-bridge dynamics, weigh-in-motion systems, and indirect structural health monitoring. The high-fidelity benchmark matches and the open-source release with reproducible configurations are clear strengths. The parametric results offer concrete, actionable guidance on when a simpler decoupled analysis is sufficient, reducing computational cost for practitioners.
major comments (2)
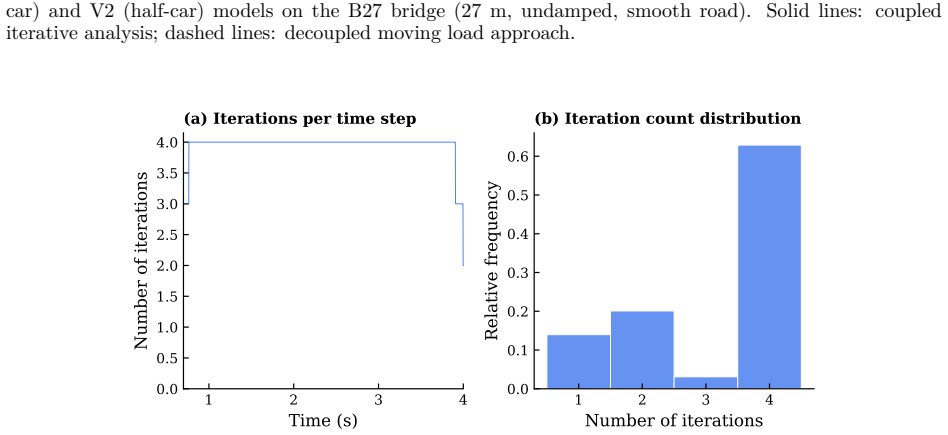
- [§4 (Numerical Validation)] §4 (Numerical Validation): The validation demonstrates excellent endpoint agreement (R² > 0.998) with three independent benchmarks, but provides no quantitative data on the iterative coupling process itself—e.g., mean and maximum iterations per time step, residual norms at convergence, or the fraction of time steps that required the maximum allowed iterations. Given that VBI problems can exhibit slow or oscillatory convergence depending on mass ratio and stiffness, this omission leaves open the possibility that the reported accuracy holds only for the specific benchmark parameters rather than generally.
- [§5 (Parametric Study)] §5 (Parametric Study): The study varies vehicle-to-bridge mass ratio, speed, road class, and traffic density to compare coupled versus decoupled responses, yet does not report whether the coupled simulations encountered convergence difficulties or required adaptive tolerances under the more demanding parameter combinations (high mass ratio, rough roads). Without such diagnostics, it is difficult to assess the practical reliability of the framework across the explored design space.
minor comments (2)
- [Software release] The GitHub repository link and installation instructions are helpful; ensure that the benchmark scripts include the exact OpenSees version and solver settings used for the reported results.
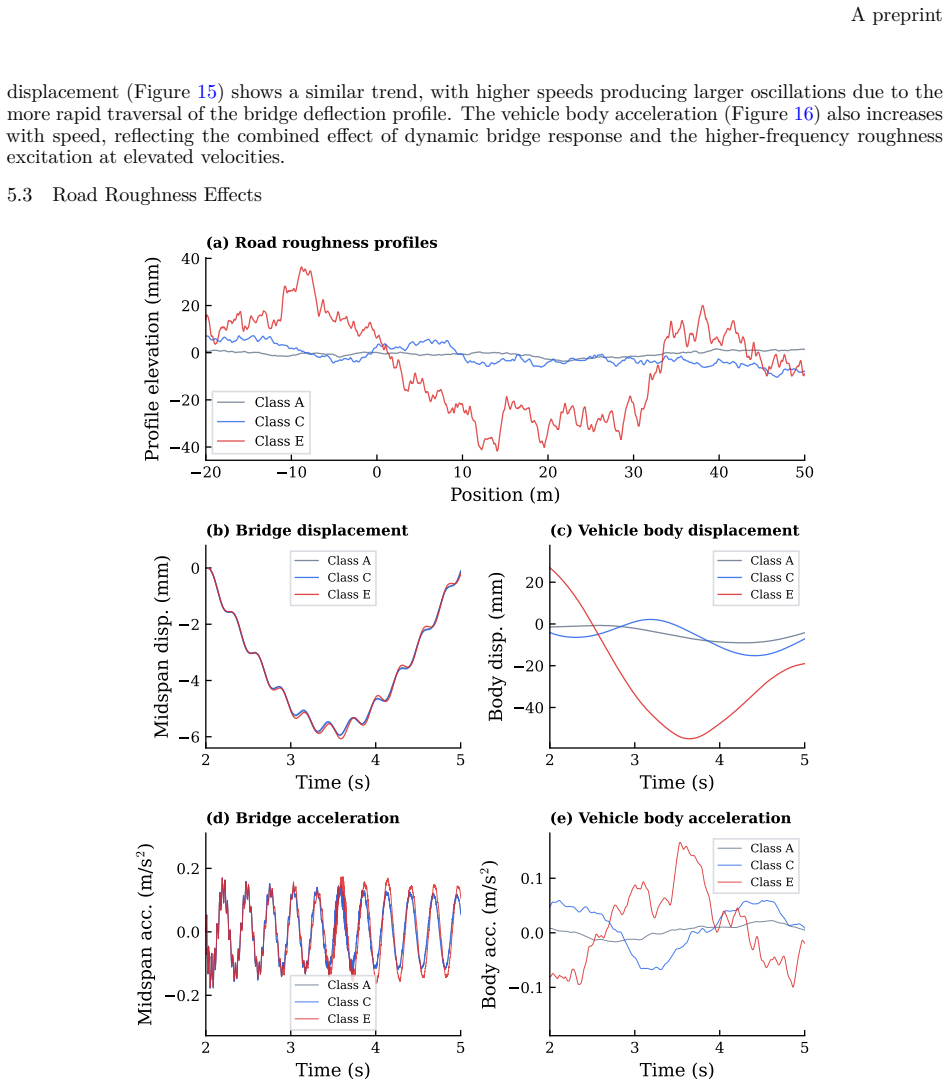
- A few figure captions could be expanded to indicate whether the plotted quantities are mid-span deflection, vehicle acceleration, or contact force.
Simulated Author's Rebuttal
We thank the referee for the constructive comments and positive overall assessment of the manuscript. We address each major comment below and have incorporated revisions to provide the requested convergence diagnostics.
read point-by-point responses
-
Referee: [§4 (Numerical Validation)] §4 (Numerical Validation): The validation demonstrates excellent endpoint agreement (R² > 0.998) with three independent benchmarks, but provides no quantitative data on the iterative coupling process itself—e.g., mean and maximum iterations per time step, residual norms at convergence, or the fraction of time steps that required the maximum allowed iterations. Given that VBI problems can exhibit slow or oscillatory convergence depending on mass ratio and stiffness, this omission leaves open the possibility that the reported accuracy holds only for the specific benchmark parameters rather than generally.
Authors: We agree that explicit convergence metrics for the iterative scheme would strengthen the validation. In the revised manuscript we have added a new table in §4 that reports, for each benchmark, the mean and maximum iterations per time step, the mean residual norm at convergence, and the fraction of time steps that reached the iteration limit. These statistics confirm reliable and rapid convergence (typically 4–8 iterations) for the benchmark configurations, with no time steps failing to converge. revision: yes
-
Referee: [§5 (Parametric Study)] §5 (Parametric Study): The study varies vehicle-to-bridge mass ratio, speed, road class, and traffic density to compare coupled versus decoupled responses, yet does not report whether the coupled simulations encountered convergence difficulties or required adaptive tolerances under the more demanding parameter combinations (high mass ratio, rough roads). Without such diagnostics, it is difficult to assess the practical reliability of the framework across the explored design space.
Authors: We acknowledge the value of reporting convergence behavior across the parametric space. Our simulations showed that the fixed-point iteration remained stable for all combinations tested, including the highest mass ratios and roughest road classes; no adaptive tolerance adjustments were required and all runs converged within the prescribed limit. The revised §5 now includes a short discussion and a supplementary figure summarizing average iterations versus mass ratio and roughness class, confirming that iteration counts increased modestly but stayed well below the maximum. revision: yes
Circularity Check
No circularity: software implementation validated against external benchmarks
full rationale
The paper describes an open-source Python framework for vehicle-bridge interaction using separate OpenSees models connected by an iterative scheme, with validation against three independent published benchmarks yielding R2 > 0.998. No derivations, fitted parameters, ansatzes, or uniqueness theorems are claimed. The central contribution is code release and external benchmark reproduction, which is self-contained and does not reduce to its own inputs by construction. No self-citation load-bearing steps appear in the provided text.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption OpenSees finite-element models accurately capture the dynamic behavior of bridges and vehicles under the modeled conditions
Reference graph
Works this paper leans on
-
[1]
Vibration of solids and structures under moving loads
Frýba, L. Vibration of solids and structures under moving loads. 1999
work page 1999
-
[2]
Vehicle–bridge interaction dynamics: With applications to high-speed railways
Yang, YB, Yau, JD, Wu, YS. Vehicle–bridge interaction dynamics: With applications to high-speed railways. 2004. retrievedfromhttps://doi.org/ 10.1142/5541
-
[3]
Extracting bridge frequencies from the dynamic response of a passing vehicle
Yang, YB, Lin, CW, Yau, JD. Extracting bridge frequencies from the dynamic response of a passing vehicle. 2004., pp, 471–493. retrievedfromhttps://doi.org/ 10.1016/S0022-460X(03)00378-X
-
[4]
A review of indirect bridge monitoring using passing vehicles
Malekjafarian, A, McGetrick, PJ, OBrien, EJ. A review of indirect bridge monitoring using passing vehicles. 2015., p, 286139. retrievedfromhttps://doi.org/ 10.1155/2015/286139
-
[5]
Two-axle test vehicle for bridges: Theory and applica- tions
Yang, YB, Zhang, B, Wang, T, Xu, H, Wu, Y. Two-axle test vehicle for bridges: Theory and applica- tions. 2019., pp, 51–62. retrievedfromhttps://doi.org/ 10.1016/j.ijmecsci.2018.12.043
-
[6]
Dynamic response of highway bridges to heavy vehicle loads: Theory and experimental validation
Green, MF, Cebon, D. Dynamic response of highway bridges to heavy vehicle loads: Theory and experimental validation. 1994., pp, 51–78. retrievedfromhttps://doi.org/ 10.1006/jsvi.1994.1046
-
[7]
Dynamic load on continuous multi-lane bridge deck from moving vehicles
Zhu, XQ, Law, SS. Dynamic load on continuous multi-lane bridge deck from moving vehicles. 2002., pp, 697–716. retrievedfromhttps://doi.org/ 10.1006/jsvi.2001.3996
-
[8]
A drive-by inspection system via vehicle moving force identification
OBrien, EJ, McGetrick, PJ, Gonzalez, A. A drive-by inspection system via vehicle moving force identification. 2014., pp, 821–848. retrievedfromhttps://doi.org/ 10.12989/sss.2014.13.5.821
-
[9]
Drive-by damage detection in bridges using the apparent profile
OBrien, EJ, Keenahan, J. Drive-by damage detection in bridges using the apparent profile. 2015., pp, 813–825. retrievedfromhttps://doi.org/ 10.1002/stc.1721
-
[10]
Identification of damping in a bridge using a moving instrumented vehicle
Gonzalez, A, OBrien, EJ, McGetrick, PJ. Identification of damping in a bridge using a moving instrumented vehicle. 2012., pp, 4115–4131. retrievedfromhttps://doi.org/ 10.1016/j.jsv.2012.04.019
-
[11]
On the use of a passing vehicle for the estimation of bridge mode shapes
Malekjafarian, A, OBrien, EJ. On the use of a passing vehicle for the estimation of bridge mode shapes. 2017., pp, 77–91. retrievedfromhttps://doi.org/ 10.1016/j.jsv.2017.02.051
-
[12]
Bridge modal identification us- ing acceleration measurements within moving vehicles
Eshkevari, SS, Pakzad, SN, Takac, M, Matarazzo, TJ. Bridge modal identification us- ing acceleration measurements within moving vehicles. 2020., p, 106733. retrieved- fromhttps://doi.org/10.1016/j.ymssp.2020.106733. 25 A preprint
-
[13]
Mei, Q, Gul, M, Boay, M. Indirect health monitoring of bridges using Mel-frequency cepstral coefficients and principal component analysis. 2019., pp, 523–546. retrieved- fromhttps://doi.org/10.1016/j.ymssp.2018.10.006
-
[14]
Towards smart transportation system: A ve- hicle scanning method for bridge health monitoring
Mei, Q, Gul, M, Shirzad-Ghaleroudkhani, N. Towards smart transportation system: A ve- hicle scanning method for bridge health monitoring. 2021., pp, 614–630. retrieved- fromhttps://doi.org/10.1111/mice.12650
-
[15]
OpenSees: A framework for earthquake engineering simulation
McKenna, F. OpenSees: A framework for earthquake engineering simulation. 2011., pp, 58–66. re- trievedfromhttps://doi.org/10.1109/MCSE.2011.66
-
[16]
Cantero, D, Sarwar, MZ, Malekjafarian, A, Corbally, R, Makki Alamdari, M, Cheema, P, et al. Numerical benchmark for road bridge damage detection from passing vehicles responses applied to four data-driven methods. 2024., p, 190. retrievedfromhttps://doi.org/ 10.1007/s43452-024-01001-9
-
[17]
Vehicle–bridge interaction element for dynamic analysis
Yang, YB, Yau, JD. Vehicle–bridge interaction element for dynamic analysis. 1997., pp, 1512–1518. retrievedfromhttps://doi.org/10.1061/(ASCE)0733-9445(1997)123:11(1512)
-
[18]
ISO 8608:2016 – mechanical vibration – road surface profiles – reporting of measured data
International Organization for Standardization. ISO 8608:2016 – mechanical vibration – road surface profiles – reporting of measured data. 2016
work page 2016
-
[19]
OpenSeesPy: Python library for the OpenSees finite element framework
Zhu, M, McKenna, F, Scott, MH. OpenSeesPy: Python library for the OpenSees finite element framework. 2018. retrievedfrom https://openseespydoc.readthedocs.io
work page 2018
-
[20]
A method of computation for structural dynamics
Newmark, NM. A method of computation for structural dynamics. 1959., pp, 67–94
work page 1959
-
[21]
Dynamics of structures: Theory and applications to earthquake engineering
Chopra, AK. Dynamics of structures: Theory and applications to earthquake engineering. 2017
work page 2017
-
[22]
VBI-2D: Road vehicle–bridge interaction simulation tool for MATLAB
Cantero, D. VBI-2D: Road vehicle–bridge interaction simulation tool for MATLAB. 2024. retrieved- fromhttps://github.com/DanielCanteroNTNU/VBI-2D
work page 2024
-
[23]
The use of vehicle acceleration measurements to estimate road roughness
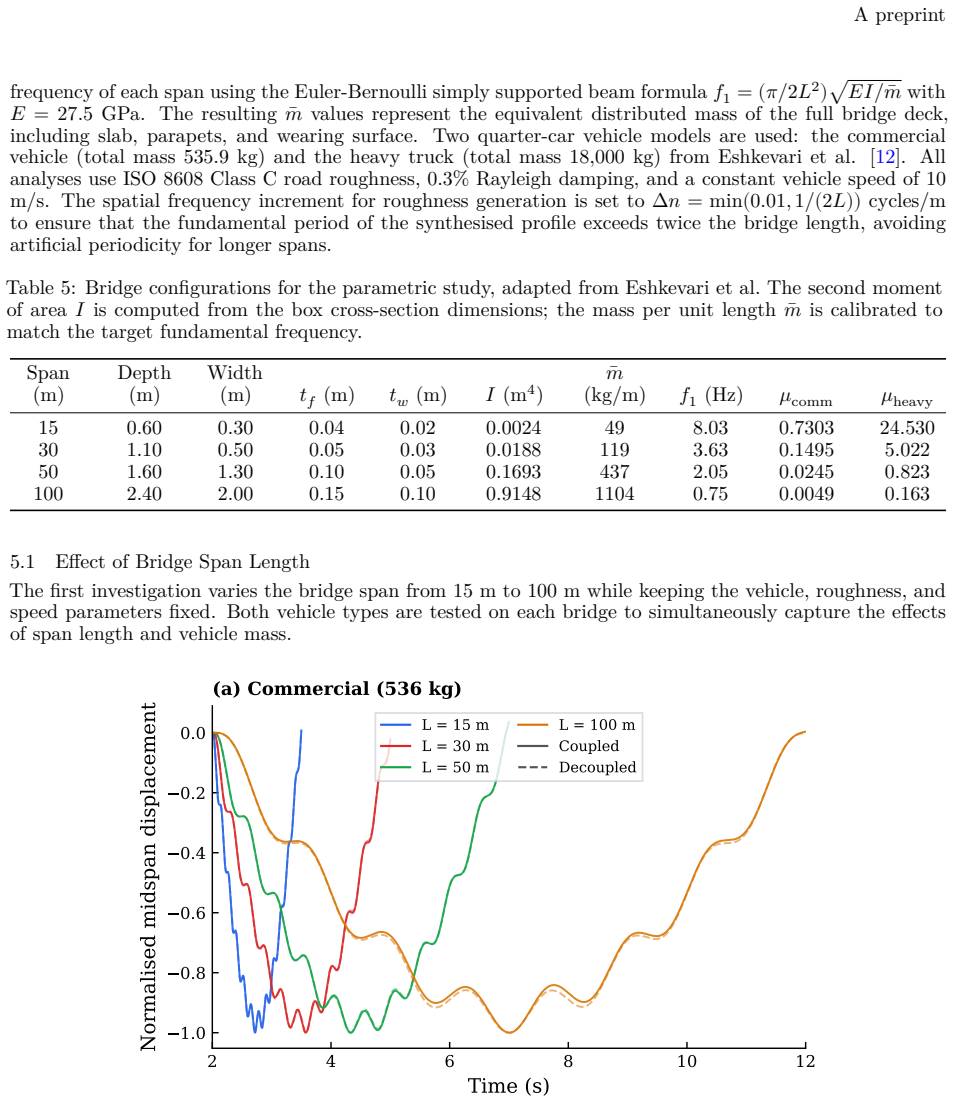
Gonzalez, A, OBrien, EJ, Li, YY, Cashell, K. The use of vehicle acceleration measurements to estimate road roughness. 2008., pp, 483–499. retrievedfromhttps://doi.org/ 10.1080/00423110701485050. 26 A preprint Appendix: OpenSees Vehicle Model Topology Table 6 summarises the OpenSees node layout, element connectivity, and boundary conditions for each of the...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.