Recognition: 2 theorem links
· Lean TheoremEnvironment-Conditioned Diffusion Meta-Learning for Data-Efficient WiFi Localization
Pith reviewed 2026-05-12 03:19 UTC · model grok-4.3
The pith
EnvCoLoc uses 3D point cloud descriptors to condition a diffusion generator that supplies geometry-aware parameter offsets for meta-learning initializations in WiFi localization.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
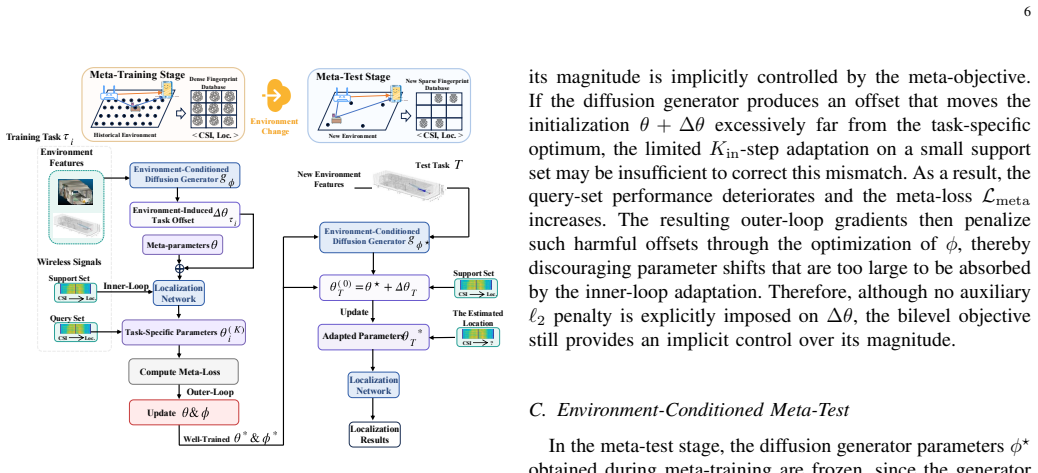
EnvCoLoc extracts structured descriptors from 3D point clouds and uses them to condition a latent diffusion generator, which produces environment-specific parameter offsets to modulate a shared meta-learned initialization. The diffusion generator and localization network are jointly optimized within a two-loop meta-learning framework so that the generated offsets capture systematic environment-dependent variations while gradient-based inner-loop adaptation reduces residual task-specific mismatch.
What carries the argument
The latent diffusion generator conditioned on 3D point cloud descriptors to output parameter offsets that adjust the meta-learned initialization.
If this is right
- Joint optimization of the diffusion generator and localization network enables learning of stochastic mappings from coarse environmental descriptors to high-dimensional parameter corrections even with limited data.
- The excess-loss analysis for finite-step adaptation provides theoretical grounding for why geometry-aware initialization improves adaptation.
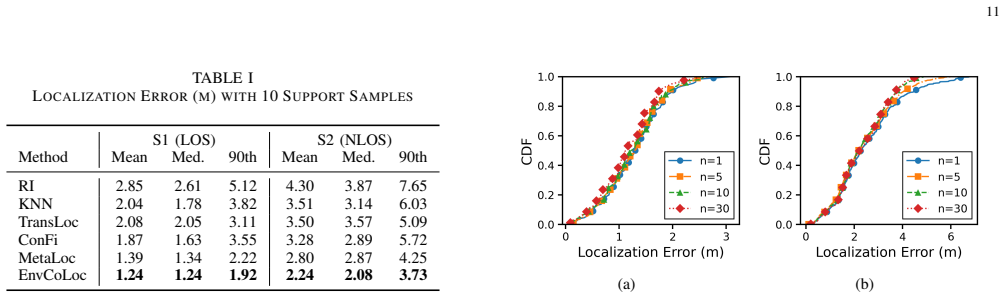
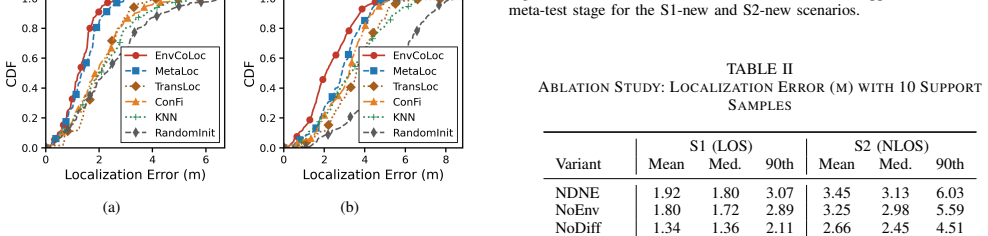
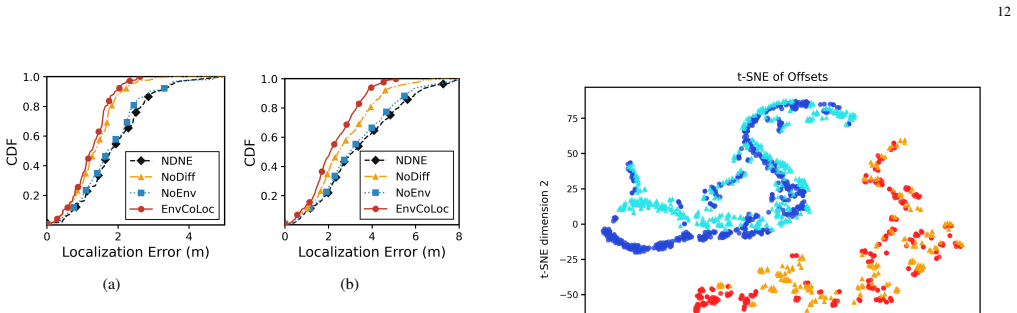
- Real-world experiments confirm up to a 20 percent reduction in mean localization error in NLOS scenarios when only ten support samples are available.
- Inner-loop gradient steps further refine the model after the generated offsets are applied, addressing any remaining environment-specific mismatch.
Where Pith is reading between the lines
- The same conditioning mechanism could be tested on other signal-based tasks such as channel prediction where geometry similarly shapes propagation.
- Updating the 3D point cloud descriptors in near real time might allow the framework to track slow changes in the environment without full retraining.
- Scaling the approach to multi-floor buildings or outdoor settings would reveal whether the diffusion prior remains effective as descriptor complexity grows.
Load-bearing premise
That structured descriptors extracted from 3D point clouds can effectively capture diverse multipath variations to condition a latent diffusion generator and provide informative initializations for meta-adaptation in new environments.
What would settle it
Running the same real-world NLOS test with ten support samples once with the full 3D-conditioned diffusion offsets and once with the diffusion generator disabled; if the mean localization error reduction vanishes without the conditioning, the central claim is falsified.
Figures


read the original abstract
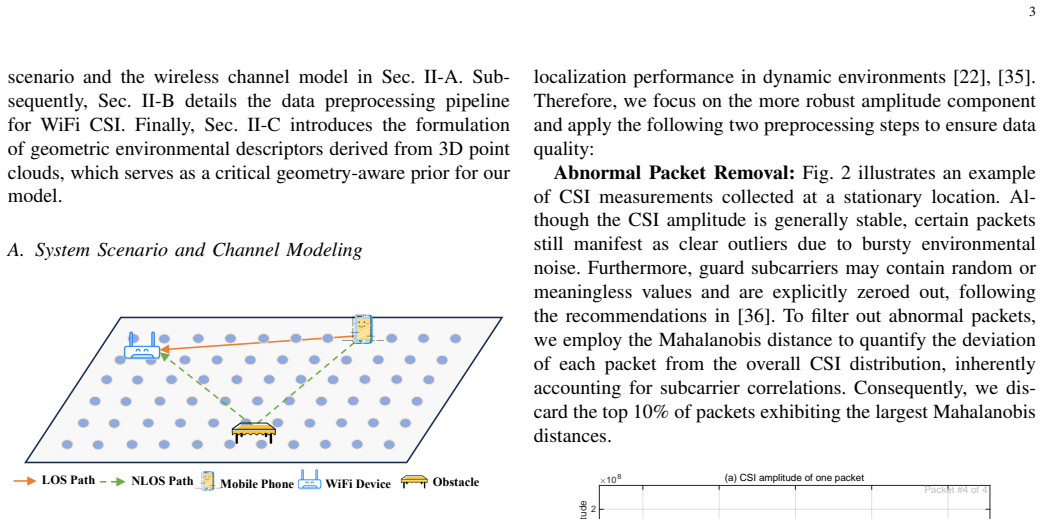
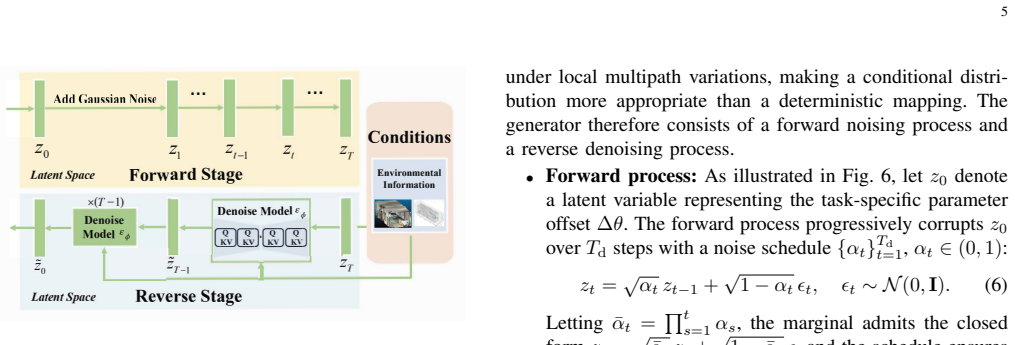
Fingerprinting-based localization often suffers from poor cross-environment generalization, especially when only a few labeled samples are available in the target environment. Existing methods mitigate distribution shifts through domain adaptation or improved signal representations, but they usually ignore environmental geometry or use it in a deterministic manner, limiting their ability to capture diverse multipath variations in complex propagation conditions. To address this issue, we propose EnvCoLoc, an environment-conditioned diffusion meta-learning framework for few-shot fingerprinting localization. EnvCoLoc extracts structured descriptors from 3D point clouds and uses them to condition a latent diffusion generator, which produces environment-specific parameter offsets to modulate a shared meta-learned initialization. This design injects geometry-aware priors into the adaptation process and provides more informative initializations for new environments. To learn the stochastic mapping from coarse environmental descriptors to high-dimensional parameter corrections under limited data, the diffusion generator and localization network are jointly optimized within a two-loop meta-learning framework. The generated offsets capture systematic environment-dependent variations, while gradient-based inner-loop adaptation further refines the model to reduce residual task-specific mismatch. We also provide an excess-loss analysis for finite-step adaptation, theoretically supporting the benefit of geometry-aware initialization. Real-world experiments show that EnvCoLoc consistently improves localization accuracy over baseline methods, achieving up to a 20.0% reduction in mean localization error in NLOS scenarios with only 10 support samples.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes EnvCoLoc, an environment-conditioned diffusion meta-learning framework for few-shot WiFi fingerprinting localization. It extracts structured descriptors from 3D point clouds to condition a latent diffusion generator that produces environment-specific parameter offsets modulating a shared meta-learned initialization; these are refined via inner-loop gradient adaptation. The approach is jointly optimized in a two-loop meta-learning setup and supported by an excess-loss analysis for finite-step adaptation. Real-world experiments claim consistent accuracy gains over baselines, with up to 20% reduction in mean localization error in NLOS scenarios using only 10 support samples.
Significance. If the empirical results and theoretical bound hold under scrutiny, the work could meaningfully advance data-efficient indoor localization by incorporating stochastic, geometry-aware priors from environmental descriptors. The combination of latent diffusion for parameter offset generation with meta-learning initialization is a coherent extension of existing techniques and may generalize to other sensing tasks facing distribution shifts and limited target-domain data.
major comments (2)
- [Experimental Results] Experimental section: the central claim of up to 20% mean error reduction in NLOS with 10-shot adaptation is presented without reported error bars, number of independent trials, statistical significance tests, complete baseline implementations, or data exclusion criteria. These omissions prevent verification of the reported gains and their robustness.
- [§3] §3 (Method): the excess-loss analysis assumes the diffusion-generated offsets provide a sufficiently informative initialization, but the bound derivation does not quantify how descriptor noise or incomplete point-cloud coverage propagates into the excess risk; a concrete sensitivity analysis or worst-case bound would strengthen the theoretical support for the geometry-aware component.
minor comments (2)
- [§3] Notation for the diffusion conditioning mechanism and the meta-initialization modulation could be clarified with an explicit diagram or pseudocode to aid reproducibility.
- [Introduction] The abstract and introduction would benefit from a brief comparison table of related meta-learning and diffusion-based localization methods to better position the novelty.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment below and have made revisions to strengthen the experimental validation and theoretical analysis.
read point-by-point responses
-
Referee: [Experimental Results] Experimental section: the central claim of up to 20% mean error reduction in NLOS with 10-shot adaptation is presented without reported error bars, number of independent trials, statistical significance tests, complete baseline implementations, or data exclusion criteria. These omissions prevent verification of the reported gains and their robustness.
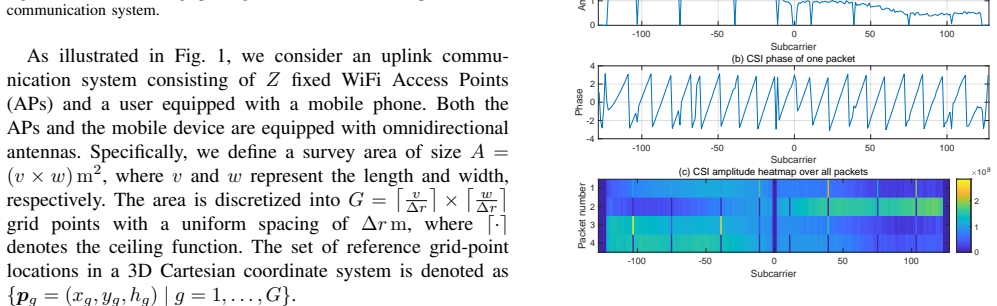
Authors: We agree that the original experimental section lacked sufficient statistical details to allow full verification. In the revised manuscript, we have added error bars representing one standard deviation over 10 independent runs with different random seeds for all reported metrics. We now explicitly state that all results are averaged across 5 independent trials per environment configuration. We include paired t-test p-values (all < 0.05) confirming statistical significance of the gains over baselines. Complete baseline re-implementations are detailed in the appendix with exact hyperparameters and code references, and data exclusion criteria are clarified (samples with RSSI below -90 dBm or incomplete point clouds were excluded). These changes substantiate the robustness of the up to 20% mean error reduction in NLOS scenarios with 10 support samples. revision: yes
-
Referee: [§3] §3 (Method): the excess-loss analysis assumes the diffusion-generated offsets provide a sufficiently informative initialization, but the bound derivation does not quantify how descriptor noise or incomplete point-cloud coverage propagates into the excess risk; a concrete sensitivity analysis or worst-case bound would strengthen the theoretical support for the geometry-aware component.
Authors: The excess-loss bound in §3 is derived under the modeling assumption of accurate descriptors to isolate the benefit of geometry-aware initialization within the meta-learning framework. We acknowledge that explicit propagation of descriptor noise was not quantified in the original derivation. In the revised manuscript, we have added a sensitivity analysis (new subsection in §3 and Appendix C) that simulates descriptor noise via Gaussian perturbations on point-cloud features and random point dropout for incomplete coverage; results show that excess risk remains bounded and EnvCoLoc retains its advantage over baselines. A full worst-case bound would require additional assumptions on the point-cloud acquisition noise model, which we note as a limitation and direction for future work. revision: partial
Circularity Check
No significant circularity detected
full rationale
The paper introduces EnvCoLoc as a novel combination of 3D point-cloud conditioning, latent diffusion for parameter offsets, and meta-learning adaptation, with an independent excess-loss bound provided as theoretical support. No derivation step reduces by construction to its own inputs or to a self-citation chain; the empirical gains are reported from real-world trials rather than from any fitted renaming or self-referential prediction. The framework extends established meta-learning and diffusion techniques without smuggling ansatzes or invoking author-specific uniqueness theorems as load-bearing premises.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Structured descriptors from 3D point clouds capture sufficient environmental geometry to model multipath variations for conditioning the diffusion generator
- domain assumption The two-loop meta-learning framework with diffusion-generated offsets enables effective finite-step adaptation
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclearEnvCoLoc extracts structured descriptors from 3D point clouds and uses them to condition a latent diffusion generator, which produces environment-specific parameter offsets to modulate a shared meta-learned initialization.
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclearWe provide an excess-loss analysis for finite-step adaptation, theoretically supporting the benefit of geometry-aware initialization.
Reference graph
Works this paper leans on
-
[1]
Fidora: Robust WiFi-based indoor localization via unsupervised domain adaptation,
X. Chen, H. Li, C. Zhou, X. Liu, D. Wu, and G. Dudek, “Fidora: Robust WiFi-based indoor localization via unsupervised domain adaptation,” IEEE Internet Things J., vol. 9, no. 12, pp. 9872–9888, 2022
work page 2022
-
[2]
Constructing indoor region-based radio map without location labels,
Z. Xing and J. Chen, “Constructing indoor region-based radio map without location labels,”IEEE Trans. Signal Process., vol. 72, pp. 2512– 2526, 2024
work page 2024
-
[3]
On CSI-based vital sign monitoring using commodity WiFi,
X. Wang, C. Yang, and S. Mao, “On CSI-based vital sign monitoring using commodity WiFi,”ACM Trans. Comput. Healthcare, vol. 1, no. 3, pp. 1–27, 2020
work page 2020
-
[4]
RISs and sidelink communications in smart cities: The key to seamless localization and sensing,
H. Chen, H. Kim, M. Ammous, G. Seco-Granados, G. C. Alexandropou- los, S. Valaee, and H. Wymeersch, “RISs and sidelink communications in smart cities: The key to seamless localization and sensing,”IEEE Commun. Mag., vol. 61, no. 8, pp. 140–146, 2023
work page 2023
-
[5]
A study on indoor position estimation based on fingerprinting using GPS signals,
M. Ochiai, M. Fujii, A. Ito, Y . Watanabe, and H. Hatano, “A study on indoor position estimation based on fingerprinting using GPS signals,” inProc. Int. Conf. Indoor Positioning Indoor Navig., 2014, pp. 727–728
work page 2014
-
[6]
TransLoc: A het- erogeneous knowledge transfer framework for fingerprint-based indoor localization,
L. Li, X. Guo, M. Zhao, H. Li, and N. Ansari, “TransLoc: A het- erogeneous knowledge transfer framework for fingerprint-based indoor localization,”IEEE Trans. Wireless Commun., vol. 20, no. 6, pp. 3628– 3642, 2021
work page 2021
-
[7]
Kalman-filter-based integration of IMU and UWB for high-accuracy indoor positioning and navigation,
D. Feng, C. Wang, C. He, Y . Zhuang, and X. Xia, “Kalman-filter-based integration of IMU and UWB for high-accuracy indoor positioning and navigation,”IEEE Internet Things J., vol. 7, no. 4, pp. 3133–3146, 2020
work page 2020
-
[8]
Integrated sensing and communications: Toward dual-functional wire- less networks for 6G and beyond,
F. Liu, Y . Cui, C. Masouros, J. Xu, X. Han, Y . C. Eldar, and S. Buzzi, “Integrated sensing and communications: Toward dual-functional wire- less networks for 6G and beyond,”IEEE J. Sel. Areas Commun., vol. 40, no. 6, pp. 1728–1767, 2022
work page 2022
-
[9]
TDOA-based indoor localization via linear fusion with low-rank matrix approximation,
H. Li, O. Elnahas, and Z. Quan, “TDOA-based indoor localization via linear fusion with low-rank matrix approximation,”IEEE Internet Things J., vol. 11, no. 6, pp. 10 635–10 647, 2024. 13
work page 2024
-
[10]
RADAR: An in-building RF-based user location and tracking system,
P. Bahl and V . N. Padmanabhan, “RADAR: An in-building RF-based user location and tracking system,” inProc. IEEE Int. Conf. Comput. Commun., vol. 2, 2000, pp. 775–784
work page 2000
-
[11]
Gain without pain: Accurate WiFi-based localization using fingerprint spatial gradient,
C. Wu, J. Xu, Z. Yang, N. D. Lane, and Z. Yin, “Gain without pain: Accurate WiFi-based localization using fingerprint spatial gradient,” Proc. ACM Interact. Mobile Wearable Ubiquitous Technol., vol. 1, no. 2, pp. 1–19, 2017
work page 2017
-
[12]
Sectjunction: Wi-Fi indoor localization based on junction of signal sectors,
S. He and S. H. G. Chan, “Sectjunction: Wi-Fi indoor localization based on junction of signal sectors,” inProc. IEEE Int. Conf. Commun., 2014, pp. 2605–2610
work page 2014
-
[13]
ARIEL: Automatic Wi-Fi based room fingerprinting for indoor local- ization,
Y . Jiang, X. Pan, K. Li, Q. Lv, R. P. Dick, M. Hannigan, and L. Shang, “ARIEL: Automatic Wi-Fi based room fingerprinting for indoor local- ization,” inProc. ACM Conf. Ubiquitous Comput., 2012, pp. 441–450
work page 2012
-
[14]
The Horus WLAN location determination system,
M. Youssef and A. Agrawala, “The Horus WLAN location determination system,” inProc. Int. Conf. Mobile Syst. Appl. Serv., 2005, pp. 205–218
work page 2005
-
[15]
D. Jin, F. Yin, C. Fritsche, F. Gustafsson, and A. M. Zoubir, “Bayesian cooperative localization using received signal strength with unknown path loss exponent: Message passing approaches,”IEEE Trans. Signal Process., vol. 68, pp. 1120–1135, 2020
work page 2020
-
[16]
DeepFi: Deep learning for indoor fingerprinting using channel state information,
X. Wang, L. Gao, S. Mao, and S. Pandey, “DeepFi: Deep learning for indoor fingerprinting using channel state information,” inProc. IEEE Wireless Commun. Netw. Conf., 2015, pp. 1666–1671
work page 2015
-
[17]
Indoor positioning system using regression-based fingerprint method,
R. P. Ghozali and G. P. Kusuma, “Indoor positioning system using regression-based fingerprint method,”Int. J. Adv. Comput. Sci. Appl., vol. 10, no. 8, pp. 231–239, 2019
work page 2019
-
[18]
H. Chen, Y . Zhang, W. Li, X. Tao, and P. Zhang, “ConFi: Convolutional neural networks based indoor Wi-Fi localization using channel state information,”IEEE Access, vol. 5, pp. 18 066–18 074, 2017
work page 2017
-
[19]
C. H. Hsieh, J. Y . Chen, and B. H. Nien, “Deep learning-based indoor localization using received signal strength and channel state information,”IEEE Access, vol. 7, pp. 33 256–33 267, 2019
work page 2019
-
[20]
CRISLoc: Reconstructable CSI Fingerprinting for Indoor Smartphone Localization,
Z. Gao, Y . Gao, S. Wang, D. Li, and Y . Xu, “CRISLoc: Reconstructable CSI Fingerprinting for Indoor Smartphone Localization,”IEEE Internet Things J., pp. 3422–3437, 2021
work page 2021
-
[21]
Intelligent fingerprint-based localization scheme using CSI images for internet of things,
X. Zhu, W. Qu, X. Zhou, L. Zhao, Z. Ning, and T. Qiu, “Intelligent fingerprint-based localization scheme using CSI images for internet of things,”IEEE Trans. Netw. Sci. Eng., 2022
work page 2022
-
[22]
CiFi: Deep convolutional neural networks for indoor localization with 5 GHz Wi-Fi,
X. Wang, X. Wang, and S. Mao, “CiFi: Deep convolutional neural networks for indoor localization with 5 GHz Wi-Fi,” inProc. IEEE Int. Conf. Commun., 2017, pp. 1–6
work page 2017
-
[23]
A novel fused positioning feature for handling heterogeneous hardware problem,
S. H. Fang and C. H. Wang, “A novel fused positioning feature for handling heterogeneous hardware problem,”IEEE Trans. Commun., vol. 63, no. 7, pp. 2713–2723, 2015
work page 2015
-
[24]
RadioUNet: Fast radio map estimation with convolutional neural networks,
R. Levie, Y . C ¸ a˘gkan, G. Kutyniok, and G. Caire, “RadioUNet: Fast radio map estimation with convolutional neural networks,”IEEE Trans. Wireless Commun., vol. 20, no. 6, pp. 4001–4015, 2021
work page 2021
-
[25]
S. Chen, B. Liu, C. Feng, C. Vallespi-Gonzalez, and C. Wellington, “3D point cloud processing and learning for autonomous driving: Impacting map creation, localization, and perception,”IEEE Signal Process. Mag., vol. 38, no. 1, pp. 68–86, 2021
work page 2021
-
[26]
Path planning with automatic seam extraction over point cloud models for robotic arc welding,
P. Zhou, R. Peng, M. Xu, V . Wu, and D. Navarro-Alarcon, “Path planning with automatic seam extraction over point cloud models for robotic arc welding,”IEEE Rob. Autom. Lett., vol. 6, no. 3, pp. 5002– 5009, 2021
work page 2021
-
[27]
MetaLoc: Learning to learn indoor RSS fingerprinting localization over multiple scenarios,
J. Gao, C. Zhang, Q. Kong, F. Yin, L. Xu, and K. Niu, “MetaLoc: Learning to learn indoor RSS fingerprinting localization over multiple scenarios,” inProc. IEEE Int. Conf. Commun., 2022, pp. 3232–3237
work page 2022
-
[28]
MetaLoc: Learning to learn wireless localization,
J. Gao, D. Wu, F. Yin, Q. Kong, L. Xu, and S. Cui, “MetaLoc: Learning to learn wireless localization,”IEEE J. Sel. Areas Commun., vol. 41, no. 12, pp. 3831–3847, 2023
work page 2023
-
[29]
D. Ha, A. Dai, and Q. V . Le, “Hypernetworks,”arXiv preprint arXiv:1609.09106, 2016
work page internal anchor Pith review arXiv 2016
-
[30]
MLP- mixer: An all-MLP architecture for vision,
I. O. Tolstikhin, N. Houlsby, A. Kolesnikov, L. Beyer, X. Zhai, T. Un- terthiner, J. Yung, A. Steiner, D. Keysers, J. Uszkoreitet al., “MLP- mixer: An all-MLP architecture for vision,” inProc. Adv. Neural Inf. Process. Syst., vol. 34, 2021, pp. 24 261–24 272
work page 2021
-
[31]
Denoising diffusion probabilistic models,
J. Ho, A. Jain, and P. Abbeel, “Denoising diffusion probabilistic models,” inProc. Adv. Neural Inf. Process. Syst., vol. 33, 2020, pp. 6840–6851
work page 2020
-
[32]
High-resolution image synthesis with latent diffusion models,
R. Rombach, A. Blattmann, D. Lorenz, P. Esser, and B. Ommer, “High-resolution image synthesis with latent diffusion models,” inProc. IEEE/CVF Conf. Comput. Vis. Pattern Recognit., 2022, pp. 10 684– 10 695
work page 2022
-
[33]
“IEEE standard for information technology—part 11: Wireless LAN medium access control (MAC) and physical layer (PHY) specifications—amendment 4: Enhancements for very high throughput for operation in bands below 6 GHz,” IEEE Std 802.11ac-2013, 2013
work page 2013
-
[34]
Free your CSI: A channel state information extraction platform for modern Wi-Fi chipsets,
F. Gringoli, M. Schulz, J. Link, and M. Hollick, “Free your CSI: A channel state information extraction platform for modern Wi-Fi chipsets,” inProc. Int. Workshop Wireless Netw. Testbeds, Exp. Eval. & Char., 2019, pp. 21–28
work page 2019
-
[35]
Precise Power Delay Profiling with Commod- ity Wi-Fi,
Y . Xie, Z. Li, and M. Li, “Precise Power Delay Profiling with Commod- ity Wi-Fi,”IEEE Trans. Mobile Comput., vol. 18, no. 6, pp. 1342–1355, 2019
work page 2019
-
[36]
Nexmon: The C-based Firmware Patching Framework,
M. Schulz, D. Wegemer, and M. Hollick, “Nexmon: The C-based Firmware Patching Framework,” https://nexmon.org, 2017
work page 2017
-
[37]
Evaluation of the Apple iPhone 12 Pro LiDAR for an Application in Geosciences,
G. Luetzenburg, A. Kroon, and A. A. Bjørk, “Evaluation of the Apple iPhone 12 Pro LiDAR for an Application in Geosciences,”Sci. Rep., vol. 11, p. 22221, 2021
work page 2021
-
[38]
Channel knowledge maps construction based on point cloud environment information,
Y . Wang, Y . Li, G. Chen, and C. Huang, “Channel knowledge maps construction based on point cloud environment information,” inProc. IEEE Veh. Technol. Conf., 2024, pp. 1–5
work page 2024
-
[39]
WiFi CSI-based device- free sensing: from Fresnel zone model to CSI-ratio model,
D. Wu, Y . Zeng, F. Zhang, and D. Zhang, “WiFi CSI-based device- free sensing: from Fresnel zone model to CSI-ratio model,”CCF Trans. Pervasive Comput. Interact., pp. 1–15, 2022
work page 2022
-
[40]
K. Yang, Y . Chen, and W. Du, “OrchLoc: In-orchard localization via a single LoRa gateway and generative diffusion model-based fingerprint- ing,” inProc. Int. Conf. Mobile Syst., Appl. Serv., 2024, pp. 304–317
work page 2024
-
[41]
Deep residual learning for image recognition,
K. He, X. Zhang, S. Ren, and J. Sun, “Deep residual learning for image recognition,” inProc. IEEE Conf. Comput. Vis. Pattern Recognit., 2016, pp. 770–778
work page 2016
-
[42]
D. Girardeau-Montaut, “Cloudcompare,”France: EDF R&D Telecom ParisTech, vol. 11, no. 5, 2016, 2024. [Online]. Available: https: //cloudcompare.org/
work page 2016
-
[43]
Task sim- ilarity aware meta learning: Theory-inspired improvement on MAML,
P. Zhou, Y . Zou, X.-T. Yuan, J. Feng, C. Xiong, and S. Hoi, “Task sim- ilarity aware meta learning: Theory-inspired improvement on MAML,” inProc. Uncertainty Artif. Intell., 2021, pp. 23–33
work page 2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.