Recognition: 2 theorem links
· Lean TheoremPressure reconstruction from error-embedded gradient measurements: a Gaussian-process generalization of Green's function integration
Pith reviewed 2026-05-13 02:05 UTC · model grok-4.3
The pith
Gaussian process regression generalizes Green's function integration to reconstruct pressure from noisy gradient data without boundary conditions.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
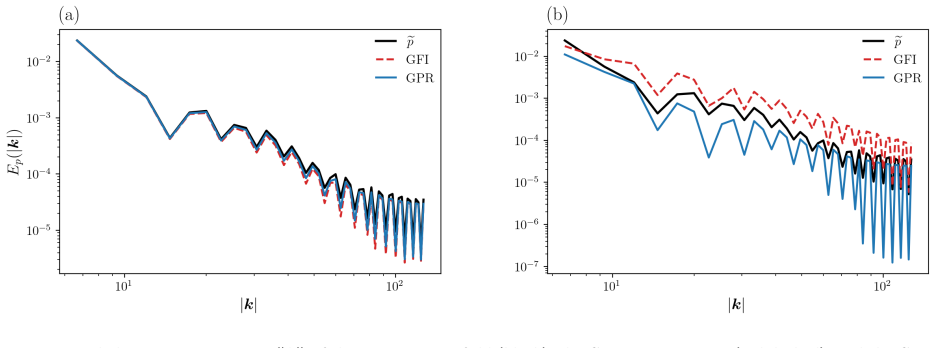
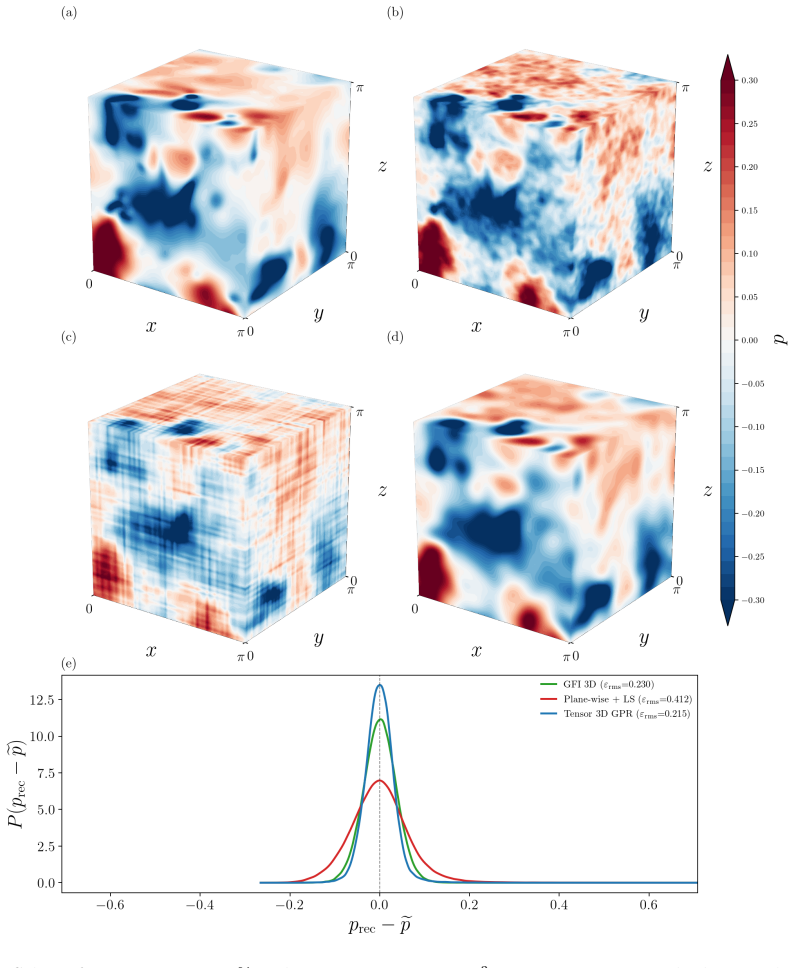
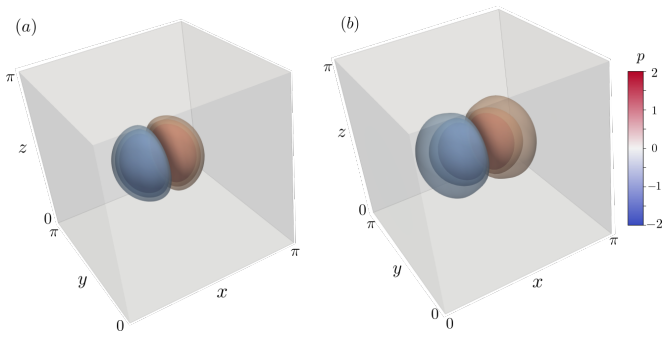
The central claim is that Green's Function Integration (GFI) is the noiseless limit of Gaussian Process Regression (GPR) for reconstructing scalar fields from gradient measurements. In two dimensions this limit uses a logarithmic kernel and in three dimensions an inverse-distance kernel. With an empirical mixture-of-Gaussians kernel fitted to the pressure correlation function from turbulence data, the GPR framework matches GFI performance while eliminating the need for boundary conditions and supplying pointwise posterior variance estimates whose standardized residuals satisfy |z| < 2 over 95% of grid points.
What carries the argument
Gaussian Process Regression with a fitted mixture-of-Gaussians kernel, shown to reduce to Green's Function Integration in the zero-noise limit.
Load-bearing premise
The pressure field is assumed to obey Gaussian statistics with a stationary correlation structure accurately captured by a mixture-of-Gaussians kernel fitted to the data.
What would settle it
Comparing the GPR reconstruction errors against GFI on the Johns Hopkins Turbulence Database data with added noise levels; if GPR does not show lower or equal error and |z|<2 compliance in over 95% of points, the claim would be falsified.
Figures






read the original abstract
Reconstructing scalar fields from error-embedded gradient measurements is a fundamental linear inverse problem with broad applications in computational physics. Conventional approaches, such as Poisson-based solvers and the Green's Function Integration (GFI) method, require explicit boundary conditions extracted from the same error-embedded observations. In this study we assess the accuracy of a Gaussian Process Regression (GPR) framework for reconstructing pressure fields in turbulent flows from error-embedded pressure-gradient data derived from kinematic measurements. The probabilistic nature of GPR inherently provides tunable denoising, eliminates the need for boundary conditions, and produces a pointwise posterior-variance error estimate. A central theoretical result of the present work is that GFI is the noiseless limit of GPR, which on the unbounded plane reduces to the well-known logarithmic kernel and in three dimensions to the inverse-distance kernel. The framework is validated on two-dimensional slices and three-dimensional subdomains of a forced homogeneous isotropic turbulence from the Johns Hopkins Turbulence Database. With an empirical mixture-of-Gaussians (MoG-$3$) kernel fitted directly to the pressure correlation function, GPR performs at least as well as GFI. In situations with under-resolved data or high noise, GPR outperforms GFI, while delivering a calibrated pointwise posterior uncertainty whose standardized residuals satisfy $|z|<2$ over $95\%$ of grid points. The framework extends to three dimensions through a tensor-product Kronecker solver coupled to conjugate gradients with close to $\mathcal{O}(N^3\log N)$ cost. A closed-form error lower bound on a periodic cube is derived for the GPR operator, with the residual gap attributable to boundary contamination on non-periodic finite domains.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a Gaussian Process Regression (GPR) framework for reconstructing pressure fields from error-embedded gradient measurements in turbulent flows. It establishes theoretically that Green's Function Integration (GFI) emerges as the zero-noise limit of GPR, reducing to the logarithmic kernel on the unbounded plane and the inverse-distance kernel in three dimensions. The approach is validated on 2D slices and 3D subdomains from the Johns Hopkins Turbulence Database using an empirical mixture-of-Gaussians (MoG-3) kernel fitted to the pressure correlation function, claiming performance at least as good as GFI (and better under noise or under-resolution) along with calibrated pointwise posterior uncertainty estimates satisfying |z|<2 over 95% of points. A closed-form error lower bound is derived for the periodic case, with an extension to 3D via Kronecker-product solvers.
Significance. If the central claims hold, the work provides a principled probabilistic generalization of GFI that incorporates denoising, eliminates explicit boundary conditions, and supplies uncertainty quantification. This could be impactful for experimental and numerical fluid dynamics applications involving gradient data, particularly where noise is significant. The theoretical reduction to known kernels and the reproducible validation on public turbulence data are notable strengths.
major comments (2)
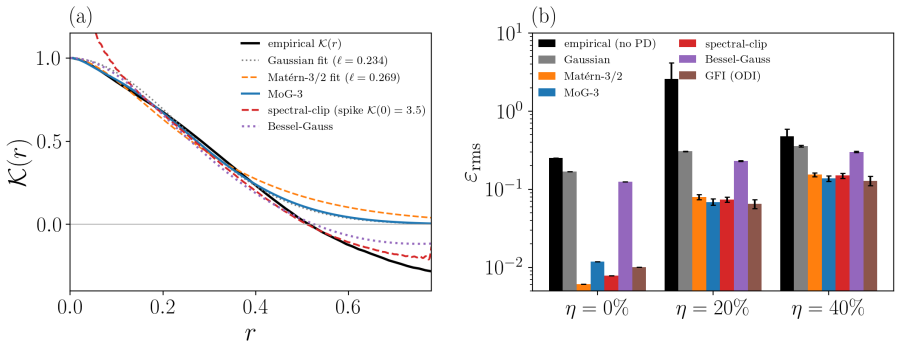
- [Abstract] Abstract and validation description: the MoG-3 kernel parameters are fitted directly to the pressure correlation function computed from the same JHU turbulence data used for performance testing and outperformance claims under noise. This data-dependent fitting makes the practical superiority claims dependent on the specific dataset rather than demonstrating robustness on independent data or with a priori kernels.
- [Abstract] Abstract: the report that standardized residuals satisfy |z|<2 over 95% of grid points is presented without accompanying details on the exact posterior-variance formula, the noise model used in the GPR, or how calibration was verified across the range of noise levels and resolutions tested. This leaves the uncertainty-quantification claim only partially verifiable from the provided information.
minor comments (2)
- [Methods] The computational complexity is stated as close to O(N^3 log N) for the 3D Kronecker solver; a brief derivation or reference for this scaling would improve clarity.
- [Validation] The manuscript should explicitly state the domain (periodic vs. non-periodic) and boundary handling used in the GFI comparisons to allow direct assessment of the reported performance gap.
Simulated Author's Rebuttal
We thank the referee for their constructive comments on our manuscript. We address each major comment below and have revised the manuscript accordingly to improve clarity and address the concerns raised.
read point-by-point responses
-
Referee: [Abstract] Abstract and validation description: the MoG-3 kernel parameters are fitted directly to the pressure correlation function computed from the same JHU turbulence data used for performance testing and outperformance claims under noise. This data-dependent fitting makes the practical superiority claims dependent on the specific dataset rather than demonstrating robustness on independent data or with a priori kernels.
Authors: We agree that the MoG-3 kernel is fitted to the pressure correlation function derived from the same JHU turbulence dataset used for validation. This choice allows the method to leverage the actual statistical structure of the pressure field for optimal performance in this setting, but it does mean the reported gains are specific to a data-adapted kernel rather than a universal a priori choice. The theoretical result that GFI emerges as the zero-noise limit of GPR holds for arbitrary kernels. To address the concern, we have revised the abstract to explicitly state that the kernel is fitted to the test data's correlation function and have added results in the manuscript using a standard squared-exponential kernel (without data-specific fitting) to demonstrate performance in the a priori case. These changes clarify the scope of the outperformance claims. revision: yes
-
Referee: [Abstract] Abstract: the report that standardized residuals satisfy |z|<2 over 95% of grid points is presented without accompanying details on the exact posterior-variance formula, the noise model used in the GPR, or how calibration was verified across the range of noise levels and resolutions tested. This leaves the uncertainty-quantification claim only partially verifiable from the provided information.
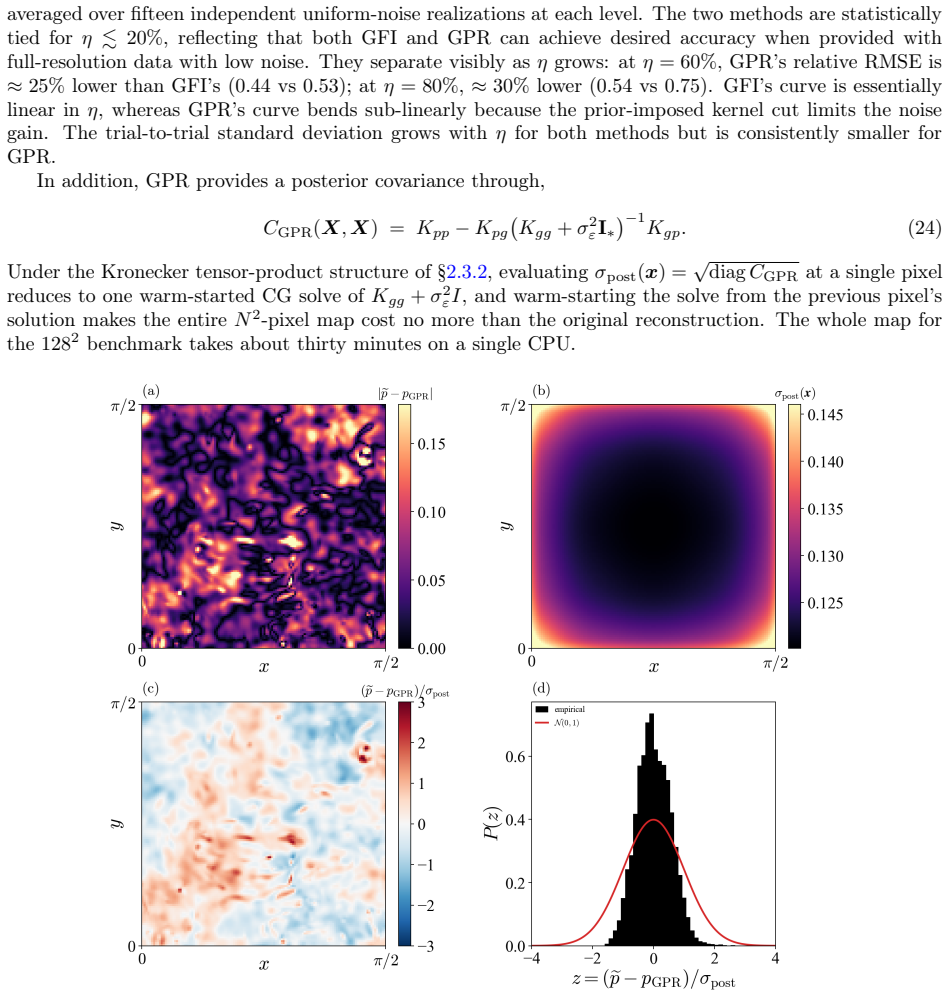
Authors: We agree that the abstract requires additional detail for full verifiability of the uncertainty quantification. The GPR noise model assumes additive Gaussian noise on the gradient measurements. The posterior variance follows the standard formula k(x,x) - k(x,X)(K + σ²I)^{-1}k(X,x), and calibration was assessed by computing standardized residuals z across multiple noise levels and resolutions, confirming the reported coverage. We have revised the abstract to briefly reference the noise model and calibration procedure while pointing to the relevant equations and figures in the main text for the exact formulas and verification details. revision: yes
Circularity Check
No significant circularity identified
full rationale
The central theoretical result—that GFI is the noiseless limit of GPR, reducing to the logarithmic kernel on the unbounded plane or inverse-distance kernel in 3D—is presented as a mathematical limiting case derived from the GPR posterior mean under zero observation noise and a kernel matching the Green's function of the integration operator. This equivalence is not a reduction to the paper's inputs by construction but follows from the standard properties of Gaussian processes applied to the linear inverse problem; the abstract and description indicate an algebraic derivation rather than an ansatz or fitted parameter renamed as a prediction. The empirical MoG-3 kernel is fitted to pressure correlations from the Johns Hopkins Turbulence Database solely for practical validation and performance comparison, not as part of the theoretical claim, and the framework is benchmarked against GFI on the same external data source with reported posterior uncertainty calibration. No load-bearing self-citations, uniqueness theorems imported from prior author work, or self-definitional loops appear in the provided text; the derivation chain remains self-contained against the external turbulence database benchmarks.
Axiom & Free-Parameter Ledger
free parameters (1)
- MoG-3 kernel parameters
axioms (2)
- domain assumption The pressure field is a zero-mean Gaussian random field with stationary isotropic statistics
- domain assumption Gradient measurements are linear observations of the field corrupted by additive Gaussian noise
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclearA central theoretical result ... GFI is the noiseless limit of GPR, which on the unbounded plane reduces to the well-known logarithmic kernel and in three dimensions to the inverse-distance kernel.
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclearempirical mixture-of-Gaussians (MoG-3) kernel fitted directly to the pressure correlation function
Reference graph
Works this paper leans on
-
[1]
X. Liu, J. Katz, Measurements of pressure distribution by integrating the material acceleration, in: Cav03-GS-14-001, Fifth international symposium on cavitation (CAV2003), Osaka, Japan, 2003, pp. 1–4
work page 2003
-
[2]
X. Liu, J. Katz, Instantaneous pressure and material acceleration measurements using a four-exposure piv system, Experiments in fluids 41 (2006) 227–240
work page 2006
-
[3]
D. A. Buchta, J. B. Freund, The near-field pressure radiated by planar high-speed free-shear-flow turbulence, Journal of Fluid Mechanics 832 (2017) 383–408
work page 2017
-
[4]
S. F. Wu, Methods for reconstructing acoustic quantities based on acoustic pressure measurements, The Journal of the Acoustical Society of America 124 (2008) 2680–2697
work page 2008
-
[5]
R. A. Gramann, D. S. Dolling, Detection of turbulent boundary-layer separation using fluctuating wall pressure signals, AIAA journal 28 (1990) 1052–1056
work page 1990
-
[6]
C. Cerretelli, K. Kirtley, Boundary layer separation control with fluidic oscillators (2009)
work page 2009
- [7]
-
[8]
M. A. Abassi, Q. Wang, X. Liu, Adjoint-based data assimilation in a subdomain using omnidirectional- integration-enabled pressure dirichlet boundary conditions, Physics of Fluids 37 (2025)
work page 2025
-
[9]
T. A. Zaki, Turbulence from an observer perspective, Annual Review of Fluid Mechanics 57 (2025) 311–334. 23
work page 2025
-
[10]
X. Liu, J. R. Moreto, S. Siddle-Mitchell, Instantaneous pressure reconstruction from measured pressure gradient using rotating parallel ray method, in: 54th AIAA Aerospace Sciences Meeting, 2016, p. 1049
work page 2016
-
[11]
X. Liu, J. Katz, Pressure–rate-of-strain, pressure diffusion, and velocity–pressure-gradient tensor mea- surements in a cavity flow, AIAA Journal 56 (2018) 3897–3914
work page 2018
-
[12]
J. R. Moreto, W. J. Reeder, R. Budwig, D. Tonina, X. Liu, Experimentally mapping water surface elevation, velocity, and pressure fields of an open channel flow around a stalk, Geophysical Research Letters 49 (2022) e2021GL096835
work page 2022
-
[13]
X. Liu, J. R. Moreto, Error propagation from the piv-based pressure gradient to the integrated pressure by the omnidirectional integration method, Measurement Science and Technology 31 (2020) 055301
work page 2020
-
[14]
Q. Wang, X. Liu, Green’s function integral method for pressure reconstruction from measured pressure gradient and the interpretation of omnidirectional integration, Physics of Fluids 35 (2023)
work page 2023
-
[15]
F. Zigunov, J. J. Charonko, One-shot omnidirectional pressure integration through matrix inversion, Measurement Science and Technology 35 (2024) 125301
work page 2024
-
[16]
C. E. Rasmussen, C. K. I. Williams, Gaussian Processes for Machine Learning, MIT Press, 2006
work page 2006
- [17]
-
[18]
V. Mons, Q. Wang, T. A. Zaki, Kriging-enhanced ensemble variational data assimilation for scalar- source identification in turbulent environments, Journal of Computational Physics 398 (2019) 108856
work page 2019
-
[19]
Z. You, Q. Wang, X. Liu, Pressure reconstruction from the measured pressure gradient using gaussian process regression, in: AIAA SCITECH 2023 Forum, 2023, p. 0414
work page 2023
- [20]
-
[21]
G. Wahba, Spline Models for Observational Data, volume 59 ofCBMS-NSF Regional Conference Series in Applied Mathematics, SIAM, 1990
work page 1990
- [22]
-
[23]
G. Kimeldorf, G. Wahba, Some results on Tchebycheffian spline functions, Journal of Mathematical Analysis and Applications 33 (1971) 82–95
work page 1971
-
[24]
M. Kanagawa, P. Hennig, D. Sejdinovic, B. K. Sriperumbudur, Gaussian processes and kernel methods: A review on connections and equivalences, arXiv preprint arXiv:1807.02582 (2018)
-
[25]
A. J. Smola, B. Schölkopf, Learning with kernels, volume 4, GMD-Forschungszentrum Informationstech- nik Berlin, Germany, 1998
work page 1998
-
[26]
T. Graepel, Solving noisy linear operator equations by gaussian processes: Application to ordinary and partial differential equations, in: ICML, volume 3, 2003, pp. 234–241
work page 2003
-
[27]
J. Cockayne, C. Oates, T. Sullivan, M. Girolami, Probabilistic numerical methods for pde-constrained bayesian inverse problems, in: AIP Conference Proceedings, volume 1853, AIP Publishing LLC, 2017, p. 060001
work page 2017
- [28]
-
[29]
L. P. Swiler, M. Gulian, A. L. Frankel, C. Safta, J. D. Jakeman, A survey of constrained gaussian process regression: Approaches and implementation challenges, Journal of Machine Learning for Modeling and Computing 1 (2020). 24
work page 2020
-
[30]
A. P. Valentine, M. Sambridge, Gaussian process models—i. a framework for probabilistic continuous inverse theory, Geophysical Journal International 220 (2020) 1632–1647
work page 2020
- [31]
- [32]
-
[33]
X. Li, M. Lange-Hegermann, B. Raitˇ a, Gaussian process regression for inverse problems in linear pdes, IFAC-PapersOnLine 59 (2025) 196–201
work page 2025
-
[34]
E. J. Parish, K. Duraisamy, A paradigm for data-driven predictive modeling using field inversion and machine learning, Journal of computational physics 305 (2016) 758–774
work page 2016
-
[35]
M. Wang, Q. Wang, T. A. Zaki, Discrete adjoint of fractional-step incompressible navier-stokes solver in curvilinear coordinates and application to data assimilation, Journal of Computational Physics 396 (2019) 427–450
work page 2019
-
[36]
M. R. Hestenes, E. Stiefel, Methods of conjugate gradients for solving linear systems, Journal of Research of the National Bureau of Standards 49 (1952) 409–436. doi:10.6028/jres.049.044
-
[37]
Y. Li, E. Perlman, M. Wan, Y. Yang, C. Meneveau, R. Burns, S. Chen, A. Szalay, G. Eyink, A public turbulence database cluster and applications to study lagrangian evolution of velocity increments in turbulence, Journal of Turbulence (2008) N31
work page 2008
-
[38]
E. Perlman, R. Burns, Y. Li, C. Meneveau, Data exploration of turbulence simulations using a database cluster, in: Proceedings of the 2007 ACM/IEEE Conference on Supercomputing, 2007, pp. 1–11
work page 2007
-
[39]
N. Aronszajn, Theory of reproducing kernels, Transactions of the American Mathematical Society 68 (1950) 337–404
work page 1950
-
[40]
H. Taha, C. Gonzalez, M. Shorbagy, A minimization principle for incompressible fluid mechanics, Physics of Fluids 35 (2023)
work page 2023
-
[41]
G. Strang, A proposal for Toeplitz matrix calculations, Studies in Applied Mathematics 74 (1986) 171–176
work page 1986
-
[42]
L. Greengard, J. Strain, The fast Gauss transform, SIAM Journal on Scientific and Statistical Com- puting 12 (1991) 79–94
work page 1991
-
[43]
J. Wang, C. Zhang, J. Katz, Gpu-based, parallel-line, omni-directional integration of measured pressure gradient field to obtain the 3d pressure distribution, Experiments in Fluids 60 (2019) 58
work page 2019
-
[44]
Bochner, Harmonic analysis and the theory of probability, Courier Corporation, 2005
S. Bochner, Harmonic analysis and the theory of probability, Courier Corporation, 2005
work page 2005
-
[45]
M. L. Stein, Interpolation of spatial data: some theory for kriging, Springer Science & Business Media, 1999
work page 1999
-
[46]
Q. Wang, M. Wang, T. A. Zaki, What is observable from wall data in turbulent channel flow?, Journal of Fluid Mechanics 941 (2022) A48. doi:10.1017/jfm.2022.295
-
[47]
Q. Wang, Y. Hasegawa, T. A. Zaki, Spatial reconstruction of steady scalar sources from remote mea- surements in turbulent flow, Journal of Fluid Mechanics 870 (2019) 316–352
work page 2019
-
[48]
E. C. Howell, J. D. Hanson, Development of a non-parametric gaussian process model in the three- dimensional equilibrium reconstruction code v3fit, Journal of Plasma Physics 86 (2020) 905860102. doi:10.1017/S0022377819000813
-
[49]
Y. Yang, Y. Xue, W. Zhao, S. Yao, C. Li, C. Wu, Fast flow field prediction of three-dimensional hypersonic vehicles using an improved gaussian process regression algorithm, Physics of Fluids 36 (2024). 25
work page 2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.