Recognition: no theorem link
Limits of Learning Linear Dynamics from Experiments
Pith reviewed 2026-05-13 06:56 UTC · model grok-4.3
The pith
Even when the full linear system is not identifiable from a single trajectory, the dynamics restricted to the reachable subspace are uniquely determined.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
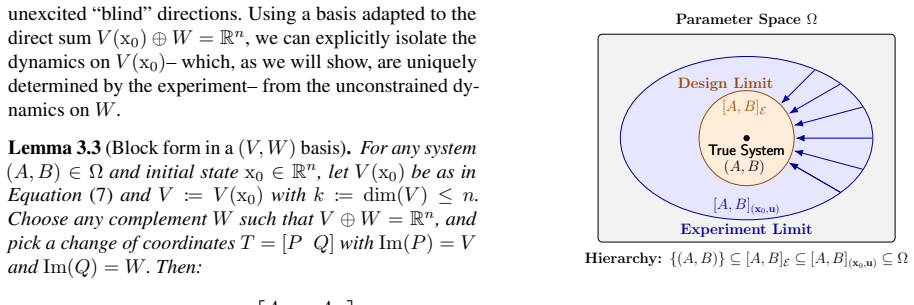
We show that the experimental setup, i.e., the realized initial state and control input, dictates a fundamental limit on the information recoverable from the observed trajectory. We develop a geometric characterization of this limit and derive a closed-form description of all systems consistent with the experimental setup. Crucially, we prove that even when the full system is not identifiable, the restricted dynamics on the subspace reachable by the experiment remain uniquely determined.
What carries the argument
The reachable subspace determined by the initial state and input sequence, which carries the uniquely identifiable restricted dynamics of the LTI system.
If this is right
- Model fitting algorithms must account for non-uniqueness outside the reachable subspace to avoid spurious conclusions.
- Predictions and control actions based on learned models are reliable only within the experimentally reachable region.
- The closed-form description of consistent systems enables explicit enumeration of possible dynamics matching the data.
- Standard identifiability conditions such as controllability are not required for unique recovery of the restricted dynamics.
Where Pith is reading between the lines
- Experiment designers could prioritize inputs that enlarge the reachable subspace to recover more of the system.
- Partial identifiability results like this may extend to nonlinear systems by linearizing around operating points.
- In applications like robotics or biology, focusing learning on the reachable subspace could improve robustness when full excitation is impractical.
Load-bearing premise
The system is linear time-invariant and all observations come from one finite trajectory under a fixed initial condition and input sequence.
What would settle it
Finding two distinct linear systems that agree on the reachable subspace dynamics but produce different trajectories for the same initial state and inputs, or a single trajectory where multiple different restricted dynamics fit the data equally well.
Figures





read the original abstract
Learning governing dynamics from data is a common goal across the sciences, yet it is only well-posed when the underlying mechanisms are identifiable. In practice, many data-driven methods implicitly assume identifiability; when this assumption fails, estimated models can yield spurious predictions and invalid mechanistic conclusions. Classical identifiability guarantees for controlled linear time-invariant (LTI) systems provide sufficient conditions -- controllability and persistent excitation -- but leave open whether identifiability holds when these conditions fail, and which parts of the system remain identifiable without full identifiability. We show that the experimental setup, i.e., the realized initial state and control input, dictates a fundamental limit on the information recoverable from the observed trajectory. We develop a geometric characterization of this limit and derive a closed-form description of all systems consistent with the experimental setup. Crucially, we prove that even when the full system is not identifiable, the restricted dynamics on the subspace reachable by the experiment remain uniquely determined.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that for controlled linear time-invariant systems observed along a single finite trajectory, the experimental setup (initial state and input sequence) imposes fundamental limits on identifiability. It develops a geometric characterization of the reachable subspace and derives a closed-form description of all consistent (A, B) pairs; crucially, it proves that the induced dynamics restricted to this subspace remain uniquely determined even when the full system is not identifiable.
Significance. If the uniqueness result holds, the work supplies a precise, non-asymptotic account of partial identifiability for LTI systems without requiring controllability or persistent excitation. The closed-form characterization of consistent systems is a concrete strength that could directly inform experiment design and model validation in data-driven control.
major comments (1)
- [Proof of uniqueness of restricted dynamics (main theorem)] The central uniqueness claim for the restricted dynamics on the reachable subspace S must explicitly rule out nontrivial kernel elements of the map [A B] that act nontrivially on S. The linear dependence case (constant u_t with x_t proportional across t) produces a kernel containing nonzero delta A supported on S; the geometric argument and closed-form description therefore need to demonstrate that no such element survives the consistency conditions for the observed trajectory.
Simulated Author's Rebuttal
We thank the referee for their careful reading of the manuscript and for the constructive suggestion regarding the uniqueness proof. We address the major comment below and will revise the manuscript accordingly to strengthen the exposition.
read point-by-point responses
-
Referee: The central uniqueness claim for the restricted dynamics on the reachable subspace S must explicitly rule out nontrivial kernel elements of the map [A B] that act nontrivially on S. The linear dependence case (constant u_t with x_t proportional across t) produces a kernel containing nonzero delta A supported on S; the geometric argument and closed-form description therefore need to demonstrate that no such element survives the consistency conditions for the observed trajectory.
Authors: We appreciate the referee highlighting the importance of explicitly addressing potential kernel elements of the map [A B] in the uniqueness argument. The reachable subspace S is defined geometrically as the smallest subspace containing the initial state and all states generated by the input sequence along the observed trajectory. The closed-form characterization of consistent (A, B) pairs is obtained by solving the system of linear equations x_{t+1} = A x_t + B u_t for the observed data. Any candidate perturbation (ΔA, ΔB) must satisfy ΔA x_t + ΔB u_t = 0 for every t in the trajectory to remain consistent. Because S is spanned by the observed states and is minimal with respect to the experiment, any nonzero action of ΔA on S would produce a mismatch with the observed next state unless the perturbation is identically zero on S. In the specific linear-dependence case (constant u_t with proportional x_t), the subspace S reduces to a low-dimensional span (often one-dimensional), and the consistency equations collapse to a scalar relation that uniquely fixes the restricted dynamics on S; a nonzero ΔA supported on S would violate this scalar equality. To make the argument fully explicit, we will insert a short lemma immediately preceding the main uniqueness theorem that directly shows no nontrivial kernel element of [A B] can act nontrivially on S while preserving consistency with the observed trajectory. This addition will clarify the geometric and algebraic reasons why such elements are ruled out. revision: yes
Circularity Check
No circularity: derivation is self-contained linear-algebraic analysis
full rationale
The paper's central result—that the restricted dynamics on the experiment-reachable subspace remain uniquely determined even without full identifiability—follows directly from the consistency equations A x_t + B u_t = x_{t+1} applied to the observed trajectory, together with a geometric decomposition of the state space. No step reduces by construction to a fitted parameter, a self-referential definition, or a load-bearing self-citation whose content is merely renamed. The closed-form description of consistent systems is obtained by solving the underdetermined linear system whose kernel is characterized explicitly; uniqueness on the reachable subspace is shown by proving that any two solutions agree when restricted to that subspace. This is standard linear-algebra reasoning with no tautological reduction to the inputs.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The system is linear time-invariant.
- domain assumption Data is generated from a single finite trajectory under fixed initial state and input sequence.
Reference graph
Works this paper leans on
-
[1]
R. Bellman and K.J. Åström. On structural identi- fiability.Mathematical Biosciences, 7(3):329–339,
-
[2]
ISSN 0025-5564. doi: https://doi.org/ 10.1016/0025-5564(70)90132-X. URL https: //www.sciencedirect.com/science/ article/pii/002555647090132X
-
[3]
Julio Hernán Braslavsky et al.Frequency domain analysis of sampled-data control systems. University of Newcastle, 1995
work page 1995
-
[4]
Discovering governing equations from data by sparse identification of nonlinear dynamical systems
Steven L Brunton, Joshua L Proctor, and J Nathan Kutz. Discovering governing equations from data by sparse identification of nonlinear dynamical systems. Proceedings of the national academy of sciences, 113 (15):3932–3937, 2016
work page 2016
-
[5]
Identifiability Challenges in Sparse Linear Ordinary Differential Equations
Cecilia Casolo, Sören Becker, and Niki Kilbertus. Identifiability challenges in sparse linear ordinary dif- ferential equations, 2025. URL https://arxiv. org/abs/2506.09816
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[6]
Neural ordinary differential equations.Advances in neural information processing systems, 31, 2018
Ricky TQ Chen, Yulia Rubanova, Jesse Bettencourt, and David K Duvenaud. Neural ordinary differential equations.Advances in neural information processing systems, 31, 2018
work page 2018
-
[7]
Springer Science & Business Media, 2012
Tongwen Chen and Bruce A Francis.Optimal sampled- data control systems. Springer Science & Business Media, 2012
work page 2012
-
[8]
Gerald B Folland.Real analysis: modern techniques and their applications. John Wiley & Sons, 1999
work page 1999
- [9]
-
[10]
doi: 10.1109/9.362892
-
[11]
Moritz Hardt, Tengyu Ma, and Benjamin Recht. Gra- dient descent learns linear dynamical systems.Journal of Machine Learning Research, 19(29):1–44, 2018
work page 2018
-
[12]
Nicholas J Higham.Functions of matrices: theory and computation. SIAM, 2008
work page 2008
- [13]
-
[14]
Rudolf Emil Kalman. Mathematical description of linear dynamical systems.Journal of the Society for Industrial and Applied Mathematics, Series A: Control, 1(2):152–192, 1963
work page 1963
-
[15]
Gerhard Kreisselmeier. On sampling without loss of observability/controllability.IEEE Transactions on Automatic Control, 44(5):1021–1025, 2002
work page 2002
-
[16]
WCB/McGraw Hill New York, 1998
Robert C Nelson et al.Flight stability and automatic control, volume 2. WCB/McGraw Hill New York, 1998
work page 1998
-
[17]
Georgia Perakis, Divya Singhvi, Omar Skali Lami, and Leann Thayaparan. Covid-19: A multiwave sir-based model for learning waves.Production and Operations Management, 32(5):1471–1489, 2023
work page 2023
-
[18]
Joshua L. Proctor, Steven L. Brunton, and J. Nathan Kutz. Dynamic mode decomposition with control. SIAM Journal on Applied Dynamical Systems, 15(1): 142–161, 2016. doi: 10.1137/15M1013857. URL https://doi.org/10.1137/15M1013857
-
[19]
Xing Qiu, Tao Xu, Babak Soltanalizadeh, and Hulin Wu. Identifiability analysis of linear ordinary differen- tial equation systems with a single trajectory.Applied Mathematics and Computation, 430:127260, 2022
work page 2022
-
[20]
Goutham Rajendran, Patrik Reizinger, Wieland Bren- del, and Pradeep Kumar Ravikumar. An interven- tional perspective on identifiability in gaussian lti sys- tems with independent component analysis. InCausal Learning and Reasoning, pages 41–70. PMLR, 2024
work page 2024
-
[21]
Paolo Rapisarda, M Kanat Camlibel, and HJ Van Waarde. A persistency of excitation condition for continuous-time systems.IEEE Control Systems Letters, 7:589–594, 2022
work page 2022
-
[22]
Near optimal finite time identification of arbitrary linear dynamical systems
Tuhin Sarkar and Alexander Rakhlin. Near optimal finite time identification of arbitrary linear dynamical systems. InInternational Conference on Machine Learning, pages 5610–5618. PMLR, 2019
work page 2019
-
[23]
Persistency of exci- tation in continuous-time systems.Systems & control letters, 9(3):225–233, 1987
Nahum Shimkin and Arie Feuer. Persistency of exci- tation in continuous-time systems.Systems & control letters, 9(3):225–233, 1987
work page 1987
-
[24]
Learning without mix- ing: Towards a sharp analysis of linear system identi- fication
Max Simchowitz, Horia Mania, Stephen Tu, Michael I Jordan, and Benjamin Recht. Learning without mix- ing: Towards a sharp analysis of linear system identi- fication. InConference On Learning Theory, pages 439–473. PMLR, 2018
work page 2018
-
[25]
Agustín Somacal, Yamila Barrera, Leonardo Boechi, Matthieu Jonckheere, Vincent Lefieux, Dominique Pi- card, and Ezequiel Smucler. Uncovering differential equations from data with hidden variables.Physical Review E, 105(5):054209, 2022. 9
work page 2022
-
[26]
Springer Science & Business Media, 2013
Eduardo D Sontag.Mathematical control theory: deterministic finite dimensional systems, volume 6. Springer Science & Business Media, 2013
work page 2013
-
[27]
Identifiability of linear and linear-in- parameters dynamical systems from a single trajectory
Shelby Stanhope, Jonathan E Rubin, and David Swigon. Identifiability of linear and linear-in- parameters dynamical systems from a single trajectory. SIAM Journal on Applied Dynamical Systems, 13(4): 1792–1815, 2014
work page 2014
-
[28]
Yuanyuan Wang, Biwei Huang, Wei Huang, Xi Geng, and Mingming Gong. Identifiability analysis of lin- ear ode systems with hidden confounders.Advances in Neural Information Processing Systems, 37:59054– 59092, 2024
work page 2024
-
[29]
A note on persistency of excitation
Jan C Willems, Paolo Rapisarda, Ivan Markovsky, and Bart LM De Moor. A note on persistency of excitation. Systems & Control Letters, 54(4):325–329, 2005
work page 2005
-
[30]
Walter Murray Wonham.Linear multivariable control, volume 101. Springer, 1974
work page 1974
-
[31]
Yue Yu, Shahriar Talebi, Henk J Van Waarde, Ufuk Topcu, Mehran Mesbahi, and Behçet Açıkmes, e. On controllability and persistency of excitation in data- driven control: Extensions of willems’ fundamental lemma. In2021 60th IEEE Conference on Decision and Control (CDC), pages 6485–6490. IEEE, 2021. 10 Limits of Learning Linear Dynamics from Experiments (Su...
work page 2021
-
[32]
V(x 0) satisfies the conditions.By the definition of the Krylov sequence, the 0−th order terms include x0 and the columns of B, meaning {x0} ∪Im(B)⊆V(x 0). Furthermore, multiplying any vector in V(x 0) by A yields a linear combination of terms up to An[x0 B]. By the Cayley-Hamilton theorem, An can be expressed as a linear combination of lower powers A0, ....
-
[33]
Because x0 ∈S and S is A−invariant, we necessarily have Akx0 ∈S for all k∈ {0,
Minimality.Let S⊆R n be any arbitrary A−invariant subspace (AS⊆S ) that contains {x0} ∪Im(B) . Because x0 ∈S and S is A−invariant, we necessarily have Akx0 ∈S for all k∈ {0, . . . , n−1} . By the same logic, because Im(B)⊆S , we have AkIm(B)⊆S for all k∈ {0, . . . , n−1} . Because S is a linear subspace, it is closed under vector addition and scalar multi...
-
[34]
By definition of [A, B]E, the trajectories agree for every admissible input u∈ U
Necessity ("=⇒"): Assume that ( ˜A, ˜B)∈[A, B] E. By definition of [A, B]E, the trajectories agree for every admissible input u∈ U . In particular, since the zero input is admissible via Assumption 2.2, we may choose u(·)≡0 m and obtain equality of the autonomous responses: ∀t∈[0, T] :e Atx0 =e ˜Atx0. Since both sides are real-analytic int, we get ∀k∈N 0 ...
-
[35]
Sufficiency ("⇐="): Let ( ˜A, ˜B) be any block matrix in Rn×(n+m) such that ˜A V(x 0) =A| V(x 0) and ˜B=B . Since ˜A V(x 0) =A| V(x 0), andV(x 0)isA−invariant(*), it is also ˜A−invariant: ∀v∈V: ˜Av=Av (*) ∈V⇐ ⇒ ˜AV⊆V def. ⇐ ⇒Vis ˜A−invariant. All powers agree onV(x 0). Next, we argue that all powers agree onV(x 0): ∀k∈N 0 : ˜Ak V(x 0) =A k V(x 0) . This f...
-
[36]
To show: ( ˜A, ˜B)∈[A, B] (x0,u) =⇒( ˜A, ˜B)∈[A, B] E ← →˜φ=φ=⇒ ˜A V(x 0) =A V(x 0) ∧ ˜B=B
Reverse Inclusion ( [A, B](x0,u) ⊆[A, B] E):Let ( ˜A, ˜B)∈[A, B] (x0,u) and shorten system responses as φ:= φ([0, T]|A, B,x 0,u)and˜φ:= ˜φ([0, T]| ˜A, ˜B,x 0,u). To show: ( ˜A, ˜B)∈[A, B] (x0,u) =⇒( ˜A, ˜B)∈[A, B] E ← →˜φ=φ=⇒ ˜A V(x 0) =A V(x 0) ∧ ˜B=B. 16 Since˜φ=φ, the time derivatives on[0, T]must match as well: ∀t∈[0, T] : ˜Ax(t) + ˜Bu(t) =Ax(t) +Bu(t...
-
[37]
Reachable space is preserved.From span{Ak dBd} ⊆span{A kBd} with w=B d, span{Ak dBd} ⊆span{A kBd}. If ∆t is nonpathological on thereachable spectrum σr(A, B), then g(λ)̸= 0 for all λ∈σ r(A, B), so g(A) is invertible on Rct 0 := span{AkB}and span{AkBd}= span{A kg(A)B}= span{A kB}=R ct 0 , givingR dt 0 ⊆ R ct 0 . For the reverse inclusion, restrict attentio...
-
[38]
Visible subspace is preserved.From span{Ak dBd} ⊆span{A kBd} with w∈ {x 0} ∪col(B) and Bd =g(A)B we get the easy directionV dt(x0)⊆V ct(x0). For the reverse inclusion on theautonomouspart Kn(A, x0), assume λ7→e λ∆t is injective on all of σ(A). By the same analytic/Jordan-block argument as above (now on the full space), for each polynomialp there is a q wi...
-
[39]
good”),x (b) 0 = 1 −1 0 (“bad
Informativeness under ZOH.To bridge the continuous-time informativeness to ZOH inputs, we rely on the exact discrete-time dynamics on the visible subspaceV(x 0): ξ[j+ 1] =A d,V ξ[j] +B d,V u[j], where Ad,V =e AV ∆t and Bd,V = R ∆t 0 eAV sBV ds. By Step 3, if ∆t is non-pathological, (Ad,V ,[x 0 Bd,V ]) is a controllable pair onR n (wherek= dim(V(x 0))). Fo...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.