Recognition: unknown
SimART: A Unified and Open Real-world Multimodal Simulation Platform for 6G Integrated Sensing and Communication
Pith reviewed 2026-05-14 18:28 UTC · model grok-4.3
The pith
SimART integrates robotics, ray tracing, and wireless engines into one reproducible pipeline for 6G ISAC using a ROS backbone.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
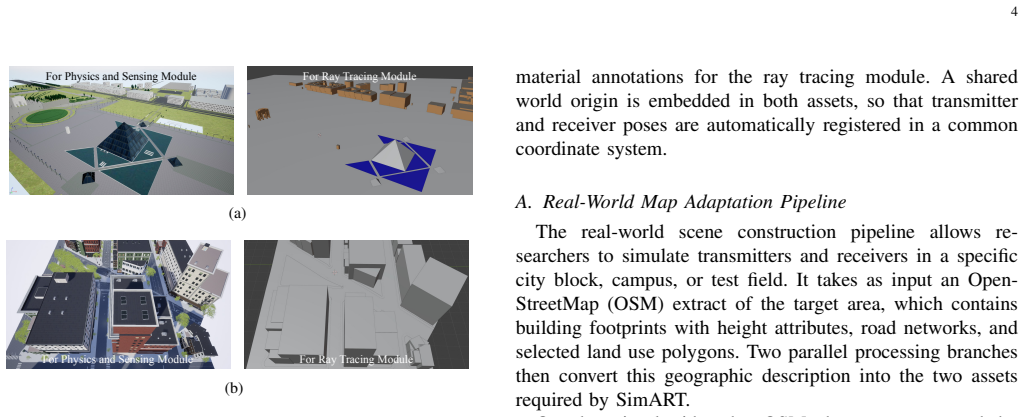
SimART integrates mature robotics, ray tracing, and wireless evaluation engines into a single reproducible pipeline. The robot operating system (ROS) backbone synchronizes and organizes all multimodal streams using a shared clock, common coordinate frame, and timestamped messages. A single rosbag recording captures the full session into one file. This decouples the sensing front end from the wireless back end so that any ROS-compatible simulator can be used while reusing the same back end across aerial, ground, indoor, and maritime settings. The platform adds a scene construction pipeline that turns OpenStreetMap extracts and user layouts into aligned visual and electromagnetic assets, plus
What carries the argument
The ROS backbone that synchronizes and organizes multimodal streams from robotics, ray tracing, and wireless simulators using a shared clock, common coordinate frame, and timestamped messages.
If this is right
- Any ROS-compatible simulator can serve as the sensing front end while the same wireless back end is reused across aerial, ground, indoor, and maritime ISAC settings.
- A scene construction pipeline converts OpenStreetMap extracts and user-defined layouts into spatially aligned visual and electromagnetic assets.
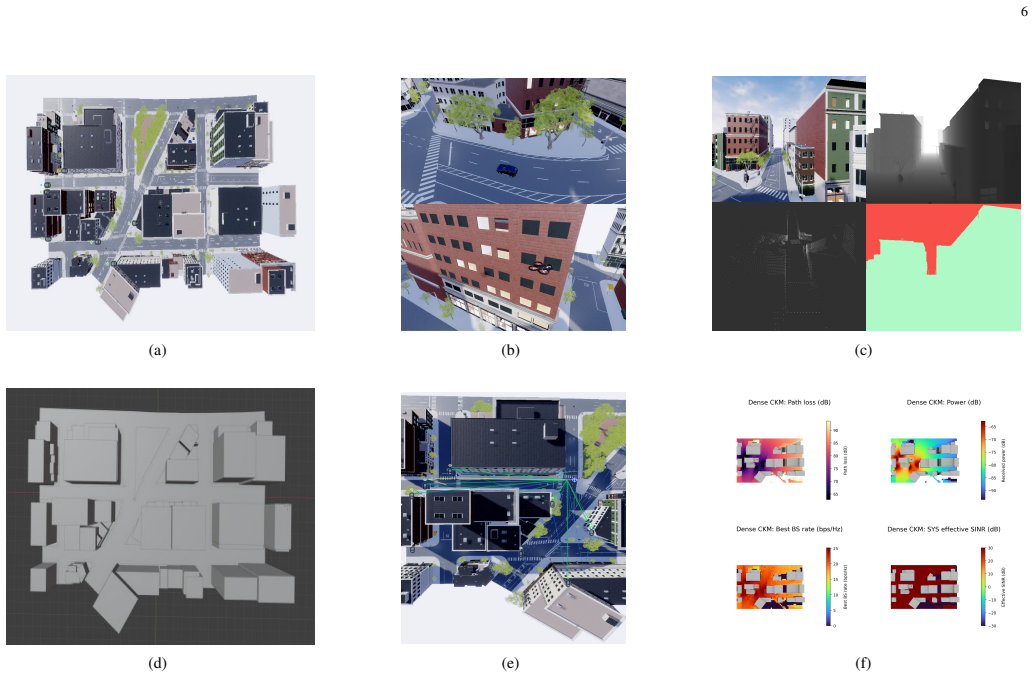
- A channel knowledge map generator aggregates ray tracing and system-level outputs into spatial priors for ISAC algorithms.
- The platform supports case studies such as vision and position aided beam prediction using the aligned multimodal data.
Where Pith is reading between the lines
- Researchers could generate large matched multimodal datasets for algorithm training without writing new integration code for each environment.
- The single-file rosbag approach could make it easier to share and verify simulation results across different research groups.
- The same synchronization layer might support adding new sensor modalities or higher-fidelity models while preserving the existing wireless evaluation path.
Load-bearing premise
The ROS backbone can reliably synchronize and organize multimodal streams from different simulators without introducing significant timing errors, compatibility issues, or performance overhead across aerial, ground, indoor, and maritime settings.
What would settle it
A run that produces timestamp mismatches exceeding sensor or channel sampling intervals, or a rosbag file that replays with different alignments or outputs than the original live session.
Figures

read the original abstract
Research on sixth-generation (6G) integrated sensing and communication (ISAC) increasingly depends on multimodal datasets. These datasets need to jointly characterize wireless propagation, onboard sensing, and platform mobility. Existing tools cover only part of these aspects. Robotics simulators model physics and perception but not site-specific channels, while ray tracing and link level tools lack vehicle dynamics and onboard sensors. Combining them manually leads to workflows that are fragile and hard to reproduce. Rather than introducing another standalone simulator, this article presents SimART. It integrates mature robotics, ray tracing, and wireless evaluation engines into a single reproducible pipeline. The key idea is a robot operating system (ROS) backbone that both synchronizes and organizes all multimodal streams. A shared clock, a common coordinate frame, and timestamped messages keep the streams aligned in time and space, and a single rosbag recording captures the full session into one reproducible file. This design decouples the sensing front end from the wireless back end, so that any ROS-compatible simulator can be plugged in while reusing the same back end across aerial, ground, indoor, and maritime ISAC settings. On top of this backbone, SimART contributes a scene construction pipeline that converts both OpenStreetMap extracts and user-defined layouts into spatially aligned visual and electromagnetic assets, and a channel knowledge map (CKM) generator that aggregates ray tracing and system level outputs into spatial priors for ISAC algorithms. A case study on vision and position aided beam prediction demonstrates the utility of the platform. The code is publicly available at https://github.com/guchuanv-alt/SimART.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents SimART, a multimodal simulation platform for 6G ISAC research. It integrates existing robotics simulators, ray-tracing engines, and wireless evaluation tools through a ROS backbone that uses a shared clock, common coordinate frame, and timestamped messages to synchronize and record all streams into a single reproducible rosbag. Additional contributions include a scene-construction pipeline that converts OpenStreetMap data and user layouts into aligned visual and electromagnetic assets, a channel-knowledge-map (CKM) generator that aggregates ray-tracing outputs into spatial priors, and a case study on vision- and position-aided beam prediction. The code is released publicly.
Significance. If the synchronization mechanism proves reliable, SimART would provide a valuable, extensible, and open-source pipeline for generating reproducible multimodal ISAC datasets across aerial, ground, indoor, and maritime scenarios. The decoupling of the sensing front-end from the wireless back-end and the reuse of mature engines are practical strengths that address the fragmentation of current tools.
major comments (1)
- The central claim that the ROS backbone reliably synchronizes multimodal streams without introducing significant timing errors, compatibility issues, or performance overhead is load-bearing for the reproducibility and utility assertions. No quantitative benchmarks on message latency, jitter, end-to-end overhead, or synchronization accuracy across the listed environments are reported, leaving the least-secure assumption unverified.
minor comments (2)
- The abstract states that the platform 'decouples the sensing front end from the wireless back end' but does not specify the exact ROS message types, coordinate-frame conventions, or version of ROS used; these details should be added to the methods section for immediate reproducibility.
- The case-study section would benefit from explicit reporting of dataset sizes, training/validation splits, and quantitative metrics (e.g., beam-prediction accuracy with and without CKM priors) so readers can assess the practical gain over existing simulators.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and for recognizing the potential utility of SimART. We address the single major comment below and will revise the manuscript to incorporate quantitative benchmarks.
read point-by-point responses
-
Referee: The central claim that the ROS backbone reliably synchronizes multimodal streams without introducing significant timing errors, compatibility issues, or performance overhead is load-bearing for the reproducibility and utility assertions. No quantitative benchmarks on message latency, jitter, end-to-end overhead, or synchronization accuracy across the listed environments are reported, leaving the least-secure assumption unverified.
Authors: We agree that explicit quantitative benchmarks are required to substantiate the synchronization claims. The manuscript describes the use of standard ROS mechanisms (shared clock, common coordinate frame, and timestamped messages) that are designed to align multimodal streams, but we did not report numerical measurements of latency, jitter, overhead, or cross-environment accuracy. In the revision we will add a new evaluation subsection that reports: average and peak message latency per topic, synchronization jitter (timestamp differences across streams), end-to-end CPU/memory overhead, and synchronization accuracy measured in representative aerial, ground, and indoor scenarios. These metrics will be obtained from logged rosbag files and ROS diagnostic tools. revision: yes
Circularity Check
No circularity: tool-integration description with no derivations or fitted predictions
full rationale
The manuscript is a platform description paper that presents SimART as an integration of existing robotics, ray-tracing, and wireless engines via a ROS backbone. No equations, parameter fits, predictions, or uniqueness theorems appear in the abstract or described content. The central claim reduces to a software architecture choice (shared clock, coordinate frame, rosbag) rather than any self-referential derivation or self-citation chain. The reader's assessment of score 1.0 is consistent with the absence of any load-bearing circular steps.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption ROS provides reliable time and space synchronization for multimodal data streams from heterogeneous simulators
Reference graph
Works this paper leans on
-
[1]
S. Dang, O. Amin, B. Shihada, and M.-S. Alouini, “What should 6G be?”Nature Electronics, vol. 3, no. 1, pp. 20–29, 2020
work page 2020
-
[2]
Y . Jiang, X. Li, G. Zhu, H. Li, J. Deng, K. Han, C. Shen, Q. Shi, and R. Zhang, “6G non-terrestrial networks enabled low-altitude economy: Opportunities and challenges,”arXiv preprint arXiv:2311.09047, 2023
-
[3]
Deepsense 6G: A large-scale real-world multi-modal sensing and communication dataset,
A. Alkhateeb, G. Charan, T. Osman, A. Hredzak, J. Morais, U. Demirhan, and N. Srinivas, “Deepsense 6G: A large-scale real-world multi-modal sensing and communication dataset,”IEEE Communica- tions Magazine, vol. 61, no. 9, pp. 122–128, 2023
work page 2023
-
[4]
A survey of channel modeling for UA V communications,
A. A. Khuwaja, Y . Chen, N. Zhao, M.-S. Alouini, and P. Dobbins, “A survey of channel modeling for UA V communications,”IEEE Commu- nications Surveys & Tutorials, vol. 20, no. 4, pp. 2804–2821, 2018
work page 2018
-
[5]
CARLA: An open urban driving simulator,
A. Dosovitskiy, G. Ros, F. Codevilla, A. Lopez, and V . Koltun, “CARLA: An open urban driving simulator,” inConference on robot learning. PMLR, 2017, pp. 1–16
work page 2017
-
[6]
Airsim: High-fidelity visual and physical simulation for autonomous vehicles,
S. Shah, D. Dey, C. Lovett, and A. Kapoor, “Airsim: High-fidelity visual and physical simulation for autonomous vehicles,” inField and service robotics: Results of the 11th international conference. Springer, 2017, pp. 621–635
work page 2017
-
[7]
Design and use paradigms for gazebo, an open-source multi-robot simulator,
N. Koenig and A. Howard, “Design and use paradigms for gazebo, an open-source multi-robot simulator,” in2004 IEEE/RSJ international conference on intelligent robots and systems (IROS)(IEEE Cat. No. 04CH37566), vol. 3. Ieee, 2004, pp. 2149–2154
work page 2004
-
[8]
Isaac Gym: High Performance GPU-Based Physics Simulation For Robot Learning
V . Makoviychuk, L. Wawrzyniak, Y . Guo, M. Lu, K. Storey, M. Macklin, D. Hoeller, N. Rudin, A. Allshire, A. Handaet al., “Isaac gym: High performance gpu-based physics simulation for robot learning,”arXiv preprint arXiv:2108.10470, 2021
work page internal anchor Pith review Pith/arXiv arXiv 2021
- [9]
-
[10]
DeepMIMO: A Generic Deep Learning Dataset for Millimeter Wave and Massive MIMO Applications
A. Alkhateeb, “DeepMIMO: A generic deep learning dataset for millimeter wave and massive mimo applications,”arXiv preprint arXiv:1902.06435, 2019
work page internal anchor Pith review Pith/arXiv arXiv 1902
-
[11]
Wireless insite: 3D wireless prediction software,
F. Remcom, “Wireless insite: 3D wireless prediction software,” 2021
work page 2021
-
[12]
G. F. Riley and T. R. Henderson, “The ns-3 network simulator,” in Modeling and tools for network simulation. Springer, 2010, pp. 15–34
work page 2010
-
[13]
MathWorks. (2023) RoadRunner. [Online]. Available: https://www.ma thworks.com/products/roadrunner.html
work page 2023
- [14]
-
[15]
A review on YOLOv8 and its advancements,
M. Sohan, T. Sai Ram, and C. V . Rami Reddy, “A review on YOLOv8 and its advancements,” inInternational conference on data intelligence and cognitive informatics. Springer, 2024, pp. 529–545
work page 2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.