Recognition: 2 theorem links
· Lean TheoremA Multi-Modal Intelligent U2V Channel Model for 6G Sensing-Communication Integration
Pith reviewed 2026-05-14 19:18 UTC · model grok-4.3
The pith
The 3D-SPADE algorithm uses LiDAR point clouds to predict scatterer distributions and produce a U2V channel model whose statistics match ray-tracing results more closely than standardized models.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
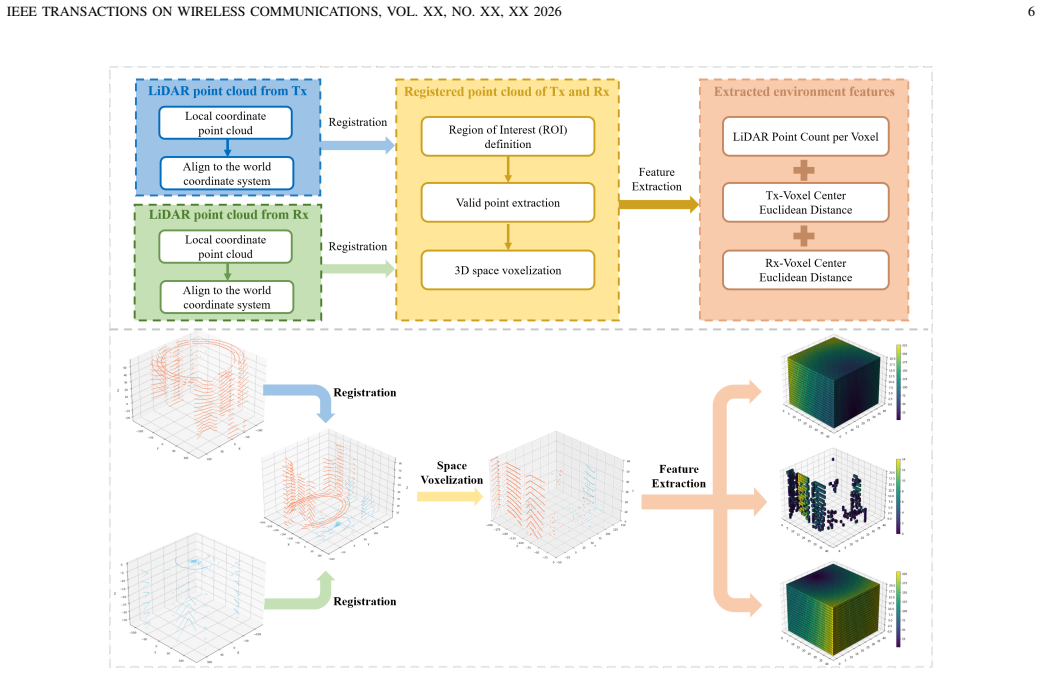
The paper establishes that the 3D Scatterer Prediction and Distribution Estimation (3D-SPADE) algorithm, by processing LiDAR point clouds to estimate scatterer positions and classify them as dynamic or static, generates a U2V channel model whose key statistical properties match those from ray-tracing simulations more closely than standardized or inconsistent models, while achieving scatterer detection recall of 93.26% and precision of 95.74% under favorable configurations.
What carries the argument
The 3D-SPADE algorithm, which maps time-varying LiDAR point clouds to the spatial distribution and dynamic/static clustering of radio scatterers to model non-stationary U2V channels.
If this is right
- Scatterer occupancy detection reaches 93.26% recall and 95.74% precision in the voxel grid under favorable configurations.
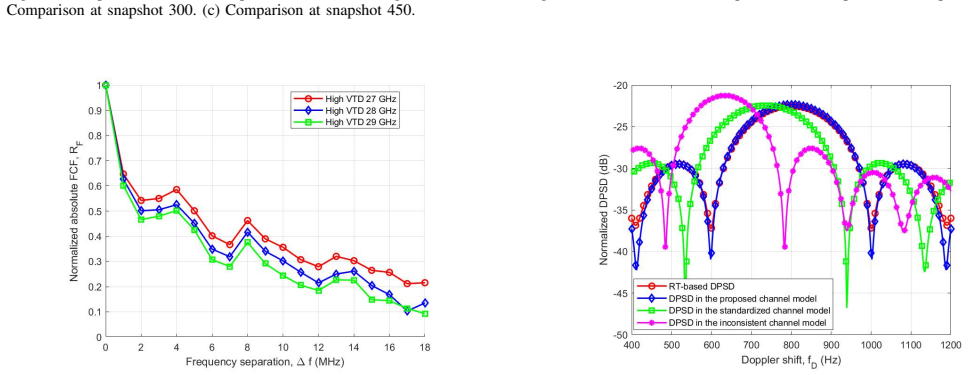
- Key channel statistical characteristics remain highly consistent with ray-tracing results across varying VTDs and UAV heights.
- Dynamic and static scatterer clusters evolve over time with changing LiDAR data to capture channel non-stationarity.
- The approach reduces computational complexity while improving modeling accuracy relative to existing methods for highly dynamic U2V scenarios.
Where Pith is reading between the lines
- The same LiDAR-to-scatterer mapping could support real-time channel adaptation if vehicles and UAVs exchange sensing data directly.
- The technique may generalize to other integrated sensing-communication links where point-cloud data is already available.
- Direct comparison against over-the-air measurements in the same scenarios would be required to confirm the simulation gains hold in practice.
Load-bearing premise
The constructed high-fidelity simulation dataset under wide-lane scenarios with varying vehicular traffic densities and UAV heights sufficiently captures real electromagnetic propagation, and LiDAR point clouds provide an accurate proxy for the spatial distribution of radio scatterers.
What would settle it
Field measurements taken in a comparable wide-lane environment that show measured channel statistics diverging from the model's predictions while agreeing more closely with ray-tracing outputs would falsify the central performance claims.
Figures






read the original abstract
This paper proposes a novel UAV-to-Vehicle (U2V) channel model for sixth-generation (6G) intelligent sensing-communication integration, based on three-dimensional (3D) scatterer prediction. To explore the mapping relationship between physical environment and electromagnetic space, a new high-fidelity mixed sensing-communication integration U2V simulation dataset under wide-lane scenarios with different vehicular traffic densities (VTDs) and UAV heights is constructed. Based on the constructed dataset, a novel 3D Scatterer Prediction and Distribution Estimation (3D-SPADE) algorithm is proposed, which leverages LiDAR point clouds to accurately predict the spatial distribution of scatterers. Furthermore, the clustering of scatterers and the subsequent classification into dynamic and static types are meticulously designed for highly dynamic U2V scenarios, while reducing computational complexity and improving modeling accuracy. As LiDAR point clouds vary over time, dynamic and static clusters evolve via 3D-SPADE, enabling precise modeling of channel non-stationarity and consistency. Simulation results demonstrate that, in the wide-lane scenario with varying VTDs and UAV heights, the proposed 3D-SPADE consistently achieves high scatterer occupancy detection performance within the voxel grid. In particular, under favorable configurations, recall reaches 93.26%, and precision reaches 95.74%, highlighting the reliability of 3D-SPADE. Key channel statistical characteristics are simulated and analyzed. These characteristics from the simulation experiments are highly consistent with ray-tracing results and exhibit better agreement than with the standardized model and inconsistent model, validating the necessity of exploring the mapping relationship and the effectiveness of the proposed model.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a multi-modal U2V channel model for 6G sensing-communication integration that constructs a high-fidelity simulation dataset under wide-lane scenarios with varying VTDs and UAV heights, introduces the 3D-SPADE algorithm to predict scatterer spatial distributions from LiDAR point clouds, clusters scatterers into dynamic and static types, and reports that the resulting channel statistics match ray-tracing results more closely than standardized or inconsistent models, with peak scatterer detection recall of 93.26% and precision of 95.74%.
Significance. If the LiDAR-to-scatterer mapping generalizes beyond simulation, the work could meaningfully advance data-driven, non-stationary channel modeling for integrated sensing-communication systems by reducing reliance on purely geometric assumptions. The explicit construction of a mixed sensing-communication dataset and the reported quantitative detection metrics constitute concrete, reproducible contributions that future studies can build upon.
major comments (2)
- [Abstract / Simulation Results] Abstract and simulation-results section: the reported recall (93.26%) and precision (95.74%) values are given without error bars, number of Monte-Carlo realizations, voxel-grid resolution details, or data-exclusion criteria, making it impossible to judge whether these figures are statistically robust or sensitive to simulation hyperparameters.
- [Dataset Construction / Validation] Dataset construction and validation: both the 3D-SPADE training data and the reference ray-tracing results are generated from the same class of geometric-optics models; the observed agreement therefore does not test the central assumption that LiDAR point clouds constitute an accurate proxy for the spatial distribution and electromagnetic properties of radio scatterers under real 6G propagation conditions (material permittivity, diffuse scattering, etc.).
minor comments (2)
- [3D-SPADE Algorithm] The description of dynamic/static cluster evolution over time would benefit from an explicit pseudocode listing or state-transition diagram to clarify how non-stationarity is enforced while controlling computational cost.
- [Figures] Axis labels, legends, and color scales on the channel-statistic comparison figures should be enlarged and made consistent across panels for readability.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive review. We address each major comment point by point below, indicating planned revisions where appropriate. The responses focus on clarifying the simulation scope and enhancing statistical reporting.
read point-by-point responses
-
Referee: [Abstract / Simulation Results] Abstract and simulation-results section: the reported recall (93.26%) and precision (95.74%) values are given without error bars, number of Monte-Carlo realizations, voxel-grid resolution details, or data-exclusion criteria, making it impossible to judge whether these figures are statistically robust or sensitive to simulation hyperparameters.
Authors: We agree that these details are necessary for assessing robustness. In the revised manuscript we will report that the metrics are averaged over 1000 independent Monte-Carlo realizations with varied random seeds for scatterer placement and UAV trajectories. The voxel grid uses a uniform resolution of 0.5 m in each dimension. Standard deviation error bars will be added to all reported figures. Voxels containing fewer than 5 LiDAR points are excluded as noise; this criterion will be explicitly stated. These additions will allow readers to evaluate sensitivity to hyperparameters. revision: yes
-
Referee: [Dataset Construction / Validation] Dataset construction and validation: both the 3D-SPADE training data and the reference ray-tracing results are generated from the same class of geometric-optics models; the observed agreement therefore does not test the central assumption that LiDAR point clouds constitute an accurate proxy for the spatial distribution and electromagnetic properties of radio scatterers under real 6G propagation conditions (material permittivity, diffuse scattering, etc.).
Authors: We acknowledge this limitation of the simulation framework. Both the LiDAR point clouds and ray-tracing results are generated from the same geometric model to enable controlled, reproducible evaluation with known ground truth. The manuscript will be revised to explicitly state that the study demonstrates algorithmic performance and consistency within this simulation environment rather than providing direct empirical validation against real-world electromagnetic measurements. A new limitations paragraph will discuss the assumptions on material properties and diffuse scattering, and we will outline planned future experimental campaigns using measured LiDAR and channel data. The contribution remains the data-driven mapping approach and its improvement over standardized models in the simulated setting. revision: partial
Circularity Check
No circularity detected; derivation relies on new dataset and algorithm with independent validation metrics
full rationale
The paper constructs a high-fidelity simulation dataset under specified scenarios and introduces the 3D-SPADE algorithm to predict scatterer distributions from LiDAR point clouds. It reports explicit performance metrics (recall 93.26%, precision 95.74%) for occupancy detection and compares resulting channel statistics to ray-tracing outputs. No quoted step reduces a claimed prediction or result to a fitted parameter by construction, nor invokes self-citation, uniqueness theorems, or ansatzes in a load-bearing manner. The validation uses separate detection accuracy and statistical agreement measures against the simulation reference, keeping the central claims self-contained without definitional equivalence to inputs.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption LiDAR point clouds can accurately predict the spatial distribution of radio scatterers in physical environments
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
a novel 3D Scatterer Prediction and Distribution Estimation (3D-SPADE) algorithm is proposed, which leverages LiDAR point clouds to accurately predict the spatial distribution of scatterers... customized deep network based on the 3D U-Net architecture
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
the proposed 3D-SPADE consistently achieves high scatterer occupancy detection performance within the voxel grid... recall reaches 93.26%, and precision reaches 95.74%
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Accessing from the sky: A tutorial on UA V communications for 5G and beyond,
Y . Zeng, Q. Wu, and R. Zhang, “Accessing from the sky: A tutorial on UA V communications for 5G and beyond,”Proc. IEEE, vol. 107, no. 12, pp. 2327–2375, Dec. 2019
work page 2019
-
[2]
Survey on 6G frontiers: Trends, applications, requirements, technologies and future research,
C. D. Alwiset al., “Survey on 6G frontiers: Trends, applications, requirements, technologies and future research,”IEEE Open J. Commun. Soc., vol. 2, pp. 836–886, 2021
work page 2021
-
[3]
Toward 6G-V2X: Aggregated RF-VLC for ultra-reliable and low-latency autonomous driving,
G. Singhet al., “Toward 6G-V2X: Aggregated RF-VLC for ultra-reliable and low-latency autonomous driving,”IEEE Commun. Standards Mag., vol. 8, no. 4, pp. 80–87, Dec. 2024
work page 2024
-
[4]
A survey on space-air-ground-sea integrated network security in 6G,
H. Guoet al., “A survey on space-air-ground-sea integrated network security in 6G,”IEEE Commun. Surv. Tutorials, vol. 24, no. 1, pp. 53– 87, Q1 2022
work page 2022
-
[5]
Goldsmith,Wireless communications
A. Goldsmith,Wireless communications. Cambridge University Press, 2005
work page 2005
-
[6]
6G wireless channel measurements and models: Trends and challenges,
C. Wanget al., “6G wireless channel measurements and models: Trends and challenges,”IEEE Veh. Technol. Mag., vol. 15, no. 4, pp. 22–32, Dec. 2020
work page 2020
-
[7]
A survey of channel modeling for UA V communi- cations,
A. A. Khuwajaet al., “A survey of channel modeling for UA V communi- cations,”IEEE Commun. Surv. Tutorials, vol. 20, no. 4, pp. 2804–2821, Q4 2018
work page 2018
-
[8]
UA V-to-Ground communications: Channel modeling and UA V selection,
P. S. Bithaset al., “UA V-to-Ground communications: Channel modeling and UA V selection,”IEEE Trans. Commun., vol. 68, no. 8, pp. 5135– 5144, Aug. 2020
work page 2020
-
[9]
A novel non-stationary 6G UA V channel model for maritime communications,
Y . Liuet al., “A novel non-stationary 6G UA V channel model for maritime communications,”IEEE J. Sel. Areas Commun., vol. 39, no. 10, pp. 2992–3005, Oct. 2021
work page 2021
-
[10]
A non-stationary multi-uav cooperative channel model for 6G massive mimo mmwave communications,
L. Baiet al., “A non-stationary multi-uav cooperative channel model for 6G massive mimo mmwave communications,”IEEE Trans. Wireless Commun., vol. 22, no. 12, pp. 9233–9247, Dec. 2023
work page 2023
-
[11]
C. Huanget al., “Artificial intelligence enabled radio propagation for communications—Part II: Scenario identification and channel model- ing,”IEEE Trans. Antennas Propag., vol. 70, no. 6, pp. 3955–3969, Jun. 2022
work page 2022
-
[12]
Machine-learning-based 3-D channel modeling for U2V mmWave communications,
K. Maoet al., “Machine-learning-based 3-D channel modeling for U2V mmWave communications,”IEEE Internet Things J., vol. 9, no. 18, pp. 17 592–17 607, Sep. 2022
work page 2022
-
[13]
A non-stationary 6G UA V channel model with 3D continuously arbitrary trajectory and self-rotation,
L. Bai, Z. Huang, and X. Cheng, “A non-stationary 6G UA V channel model with 3D continuously arbitrary trajectory and self-rotation,”IEEE Trans. Wireless Commun., vol. 21, no. 12, pp. 10 592–10 606, Dec. 2022
work page 2022
-
[14]
Deep learning for channel tracking in IRS-assisted UA V communication systems,
J. Yuet al., “Deep learning for channel tracking in IRS-assisted UA V communication systems,”IEEE Trans. Wireless Commun., vol. 21, no. 9, pp. 7711–7722, Sep. 2022
work page 2022
-
[15]
M. Gonz ´alez-Palacioet al., “Machine-learning-based combined path loss and shadowing model in LoRaW AN for energy efficiency enhancement,” IEEE Internet Things J., vol. 10, no. 12, pp. 10 725–10 739, Jun. 2023
work page 2023
-
[16]
J. Thrane, D. Zibar, and H. L. Christiansen, “Model-aided deep learning method for path loss prediction in mobile communication systems at 2.6 GHz,”IEEE Access, vol. 8, pp. 7925–7936, 2020
work page 2020
-
[17]
Path loss prediction based on machine learning and satellite image,
H. Danpinget al., “Path loss prediction based on machine learning and satellite image,”Chin. J. Radio Sci., vol. 37, no. 3, pp. 372–379, 2022
work page 2022
-
[18]
Intelligent multi-modal sensing-communication in- tegration: Synesthesia of Machines,
X. Chenget al., “Intelligent multi-modal sensing-communication in- tegration: Synesthesia of Machines,”IEEE Commun. Surv. Tutorials, vol. 26, no. 1, pp. 258–301, Q1 2024
work page 2024
-
[19]
Multi-modal intelligent channel modeling: A new mod- eling paradigm via synesthesia of machines,
L. Baiet al., “Multi-modal intelligent channel modeling: A new mod- eling paradigm via synesthesia of machines,”IEEE Commun. Surv. Tutorials, vol. 28, pp. 2612–2649, 2026
work page 2026
-
[20]
Multi-modal intelligent channel modeling framework for 6g-enabled networked intelligent systems,
L. Baiet al., “Multi-modal intelligent channel modeling framework for 6g-enabled networked intelligent systems,”IEEE Wireless Commun., pp. 1–9, 2025
work page 2025
-
[21]
Synesthesia of machines-based multi-modal intelligent V2V channel model,
Z. Hanet al., “Synesthesia of machines-based multi-modal intelligent V2V channel model,”IEEE Trans. Commun., vol. 74, pp. 5058–5073, 2026
work page 2026
-
[22]
DBSCAN clustering algorithm based on density,
D. Deng, “DBSCAN clustering algorithm based on density,” in2020 7th International Forum on Electrical Engineering and Automation (IFEEA), 2020, pp. 949–953. [23]Remcom. Wireless InSite. [Online]. Available: https://www.remcom.com/wireless-insite-em-propagation-software [Publication date: Jan. 2017, Accessed: Dec. 2025]
work page 2020
-
[23]
Airsim: High-fidelity visual and physical simulation for autonomous vehicles,
S. Shahet al., “Airsim: High-fidelity visual and physical simulation for autonomous vehicles,” inField and service robotics: Results of the 11th international conference. Springer, 2017, pp. 621–635
work page 2017
-
[24]
M³SC: A generic dataset for mixed multi-modal (MMM) sensing and communication integration,
X. Chenget al., “M³SC: A generic dataset for mixed multi-modal (MMM) sensing and communication integration,”China Communica- tions, vol. 20, no. 11, pp. 13–29, Nov. 2023
work page 2023
-
[25]
3D U-Net: learning dense volumetric segmentation from sparse annotation,
¨O. C ¸ ic ¸eket al., “3D U-Net: learning dense volumetric segmentation from sparse annotation,” inInternational conference on medical image computing and computer-assisted intervention. Springer, Oct. 2016, pp. 424–432
work page 2016
-
[26]
Measurement-based wideband radio channel character- ization in an underground parking lot,
Y . Miaoet al., “Measurement-based wideband radio channel character- ization in an underground parking lot,” in2019 27th European Signal Processing Conference (EUSIPCO), 2019, pp. 1–5
work page 2019
-
[27]
A multi-modal UA V-to-Ground channel model for 6G intelligent sensing-communication integration,
L. Baiet al., “A multi-modal UA V-to-Ground channel model for 6G intelligent sensing-communication integration,”IEEE Trans. Commun., vol. 73, no. 12, pp. 13 595–13 610, Dec. 2025
work page 2025
-
[28]
A multipath model for the powerline channel,
M. Zimmermann and K. Dostert, “A multipath model for the powerline channel,”IEEE Trans. Commun., vol. 50, no. 4, pp. 553–559, Apr. 2002
work page 2002
-
[29]
A general 3d non-stationary wireless channel model for 5g and beyond,
J. Bianet al., “A general 3d non-stationary wireless channel model for 5g and beyond,”IEEE Trans. Wireless Commun., vol. 20, no. 5, pp. 3211–3224, 2021
work page 2021
-
[30]
A lidar-aided channel model for vehicular intelligent sensing-communication integration,
Z. Huanget al., “A lidar-aided channel model for vehicular intelligent sensing-communication integration,”IEEE Trans. Intell. Transp. Syst., Dec. 2024
work page 2024
-
[31]
J. G. Proakis and M. Salehi,Digital communications. McGraw-hill New York, 2001, vol. 4. [33]Technical Specification Group Radio Access Network; Study on Channel Model for Frequencies From 0.5 to 100 GHz (Release 14), document TR 38.901 Version 14.2.0, 3GPP, sSep. 2017. [Online]. Available: http: //www.3gpp.org/DynaReport/38901.htm
work page 2001
-
[32]
A 3-D non-stationary model for beyond 5G and 6G vehicle-to-vehicle mmWave massive MIMO channels,
Z. Huang and X. Cheng, “A 3-D non-stationary model for beyond 5G and 6G vehicle-to-vehicle mmWave massive MIMO channels,”IEEE Trans. Intell. Transp. Syst., vol. 23, no. 7, pp. 8260–8276, Jul. 2021
work page 2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.