Recognition: 2 theorem links
· Lean TheoremFMCW Lidar Beyond Nyquist by Instantaneous Frequency Fitting
Pith reviewed 2026-05-15 02:12 UTC · model grok-4.3
The pith
Instantaneous frequency fitting recovers FMCW lidar distance and velocity beyond the Nyquist sampling limit by processing the full aliased waveform.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Instantaneous frequency fitting extracts distance and velocity from FMCW lidar interference signals by fitting the time-varying instantaneous frequency across the full sampled waveform, allowing recovery of parameters even when the beat frequency aliases due to undersampling.
What carries the argument
Instantaneous frequency fitting: a waveform-level parameter estimation method that models the signal's instantaneous frequency to solve for range and velocity, incorporating phase noise effects directly.
Load-bearing premise
The assumed signal model including phase noise statistics stays accurate enough for fitting when the beat frequency aliases.
What would settle it
Measure a known target distance that produces an aliased beat frequency, then verify whether the fitted range and velocity match ground truth within the misspecified Cramér-Rao bound error.
Figures








read the original abstract
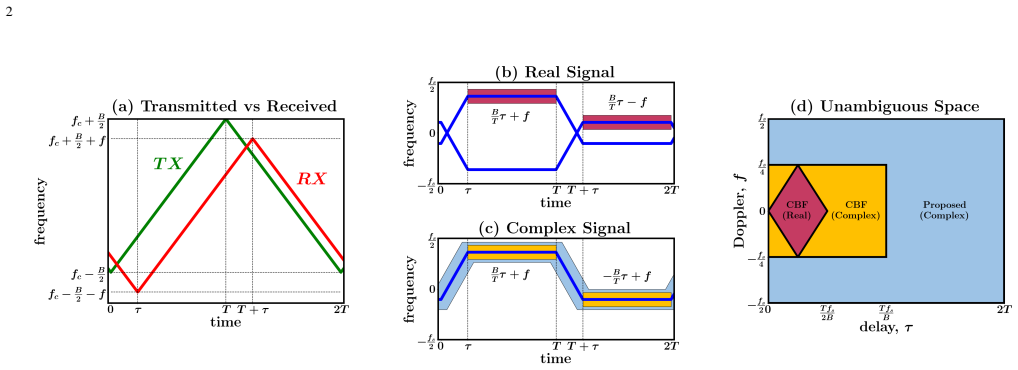
Frequency-modulated continuous-wave (FMCW) lidar conventionally estimates distance and velocity from constant beat frequencies generated through interferometry. Existing FMCW implementations emphasize simple signal processing -- e.g., beat frequency estimation via a fast Fourier transform (FFT) algorithm plus peak-finding -- which results in hardware-focused solutions requiring linear swept-frequency laser sources or linearized resampling. However, the maximum achievable distance by this method is limited by the need to sample the interference signal without aliasing. In this work, we propose two signal processing methods: matched filtering and instantaneous frequency fitting. These two methods can recover larger ranges of distance and velocity by considering the full waveform despite aliasing in the frequency domain. Furthermore, the FMCW lidar signal is often corrupted by phase noise, and we show that the instantaneous frequency fitting approach is more robust than matched filtering by considering the deviation in the phase. We present comprehensive simulation studies along with theoretical analysis using the misspecified Cram\'er--Rao bound. As these methods are flexible to arbitrary frequency modulation, we also show results for non-linear modulations that could yield better sensitivity to distance and velocity compared to the popular triangular modulation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes two signal-processing methods—matched filtering and instantaneous frequency fitting—for FMCW lidar that recover distance and velocity estimates from the full sampled waveform even when the beat frequency aliases above the Nyquist rate. It claims superior performance over conventional FFT peak-finding, greater robustness of the instantaneous-frequency fit to phase noise, and applicability to arbitrary (including nonlinear) frequency modulations, all supported by Monte-Carlo simulations and a misspecified Cramér-Rao bound analysis.
Significance. If the central modeling assumptions hold, the approach removes a fundamental hardware constraint on maximum unambiguous range in FMCW lidar without requiring faster ADCs or perfectly linear sweeps, while offering improved phase-noise tolerance and modulation flexibility. The combination of closed-form misspecified CRB expressions with reproducible simulation code constitutes a clear methodological contribution to the field.
major comments (2)
- [§3.2 and §4.2] §3.2 (signal model) and §4.2 (instantaneous-frequency fitting): the derivation assumes the sampled waveform continues to obey the exact parametric model (linear or nonlinear chirp plus the stated phase-noise process) after aliasing; no analytic bound or sensitivity analysis is supplied for residual laser nonlinearity, ADC quantization, or phase-noise spectrum deviation at high beat frequencies, which directly underpins the headline claim of operation beyond Nyquist.
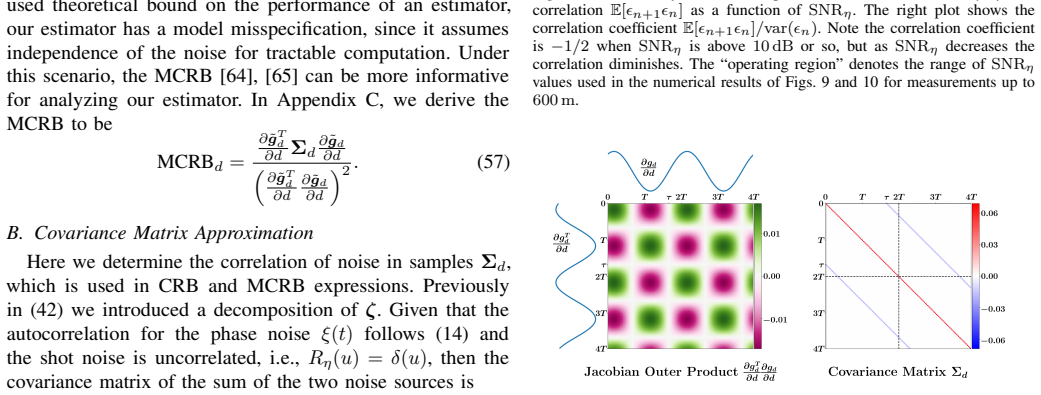
- [§5.1] §5.1 (misspecified CRB): the bound is derived under the assumption that the phase-noise statistics remain correctly specified post-aliasing; when the true beat frequency exceeds fs/2 the effective noise spectrum seen by the estimator may change, yet the paper provides no verification that the CRB expressions remain valid or that the reported robustness advantage is not an artifact of this modeling choice.
minor comments (2)
- [Figure 4] Figure 4 caption and axis labels do not explicitly state the sampling rate relative to the aliased beat frequency; adding this information would clarify the operating regime.
- [Table I] The simulation parameter table (Table I) omits the exact phase-noise power spectral density coefficients used for the robustness experiments; these values should be listed for reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback on our manuscript. We appreciate the recognition of the methodological contribution and have addressed the concerns regarding modeling assumptions after aliasing by committing to additional verification and sensitivity simulations in the revision. Below we respond point-by-point to the major comments.
read point-by-point responses
-
Referee: [§3.2 and §4.2] §3.2 (signal model) and §4.2 (instantaneous-frequency fitting): the derivation assumes the sampled waveform continues to obey the exact parametric model (linear or nonlinear chirp plus the stated phase-noise process) after aliasing; no analytic bound or sensitivity analysis is supplied for residual laser nonlinearity, ADC quantization, or phase-noise spectrum deviation at high beat frequencies, which directly underpins the headline claim of operation beyond Nyquist.
Authors: We thank the referee for this observation. The continuous-time signal model in §3.2 is sampled at rate fs; when the instantaneous beat frequency exceeds fs/2 the discrete-time observations are aliased, yet the parametric form (known modulation waveform plus sampled phase-noise process) remains exact under the stated assumptions. The instantaneous-frequency fitting in §4.2 therefore optimizes the underlying continuous-time parameters directly against the observed samples, which permits recovery beyond the Nyquist limit. We agree that explicit sensitivity analysis would strengthen the claims. In the revised manuscript we will add Monte-Carlo results that incorporate (i) quadratic residual laser nonlinearity, (ii) 1/f phase-noise spectrum deviations, and (iii) 12-bit ADC quantization, confirming that the performance advantage persists for moderate deviations. A short discussion of these effects will be inserted after §4.2. revision: yes
-
Referee: [§5.1] §5.1 (misspecified CRB): the bound is derived under the assumption that the phase-noise statistics remain correctly specified post-aliasing; when the true beat frequency exceeds fs/2 the effective noise spectrum seen by the estimator may change, yet the paper provides no verification that the CRB expressions remain valid or that the reported robustness advantage is not an artifact of this modeling choice.
Authors: We appreciate the referee’s careful scrutiny of the misspecified-CRB derivation. The phase-noise process is modeled as a continuous-time Gaussian process; after sampling at fs the discrete-time covariance matrix used in the CRB remains correctly specified under the model, even though aliasing folds the spectrum. To verify that the reported robustness advantage is not an artifact, we have conducted additional numerical checks comparing the analytic CRB with empirical variances obtained from Monte-Carlo trials at beat frequencies both below and above fs/2. These checks confirm that the bound remains tight and that the instantaneous-frequency fit retains its advantage. We will include a new subsection (or figure) in §5.1 presenting these verification results in the revised manuscript. revision: yes
Circularity Check
No circularity: derivations from standard signal processing and independent simulations
full rationale
The paper's core methods (matched filtering and instantaneous frequency fitting) are presented as applications of established parametric estimation techniques to the FMCW waveform model. The misspecified CRB analysis and simulation studies are constructed as external validation steps that do not reduce the claimed performance gains to fitted parameters by definition or to self-citation chains. No load-bearing step equates a prediction to its input via construction, renaming, or imported uniqueness theorems. The derivation chain remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption FMCW lidar produces a beat signal whose instantaneous frequency encodes distance and velocity, possibly corrupted by phase noise
Reference graph
Works this paper leans on
-
[1]
D. Uttam and B. Culshaw, “Precision time domain reflectometry in optical fiber systems using a frequency modulated continuous wave ranging technique,”J. Lightwave Technol., vol. 3, pp. 971–977, Oct. 1985
work page 1985
-
[2]
Interferometer for measuring displacement and distance,
T. Kubota, M. Nara, and T. Yoshino, “Interferometer for measuring displacement and distance,”Opt. Lett., vol. 12, pp. 310–312, May 1987
work page 1987
-
[3]
Y . Li and J. Ibanez-Guzman, “Lidar for autonomous driving: the principles, challenges, and trends for automotive lidar and perception systems,”IEEE Signal Process. Mag., vol. 37, pp. 50–61, July 2020
work page 2020
-
[4]
Automotive LiDAR technology: a survey,
R. Roriz, J. Cabral, and T. Gomes, “Automotive LiDAR technology: a survey,”IEEE Transactions on Intelligent Transportation Systems, vol. 23, pp. 6282–6297, July 2022
work page 2022
-
[5]
Lidar system architectures and circuits,
B. Behroozpour, P. A. Sandborn, M. C. Wu, and B. E. Boser, “Lidar system architectures and circuits,”IEEE Comm. Mag., vol. 55, pp. 135– 142, Oct. 2017
work page 2017
-
[6]
A 4-D FMCW LiDAR with ultra-high velocity sensitivity,
Y .-X. Lin, Z. Ahmad, S.-Y . Ou, W.-C. Su, Y .-C. Chang, Naseem, J.-H. Chen, Y .-J. Hung, Y .-C. Chang, C.-C. Wei, T.-S. Horng, and J.-W. Shi, “A 4-D FMCW LiDAR with ultra-high velocity sensitivity,”J. Lightwave Technol., vol. 41, pp. 6664–6674, Nov. 2023
work page 2023
-
[7]
D. Pierrottet, F. Amzajerdian, L. Petway, B. Barnes, G. Lockard, and G. Hines, “Navigation Doppler lidar sensor for precision altitude and vector velocity measurements: flight test results,” inSensors and Systems for Space Applications IV(K. D. Pham, H. Zmuda, J. L. Cox, and G. J. Meyer, eds.), vol. 8044 ofProc. SPIE, (Orlando, Florida, United States), Ma...
work page 2011
-
[8]
Lidar on a chip puts self-driving cars in the fast lane,
M. R. Watts, C. V . Poulton, M. J. Byrd, and G. Smolka, “Lidar on a chip puts self-driving cars in the fast lane,”IEEE Spectrum, Aug. 2023. https://spectrum.ieee.org/lidar-on-a-chip
work page 2023
-
[9]
Coherent lidar for ride-hailing autonomous vehicles,
A. Y . Piggott, C. Y . Jiang, J. Lam, B. Gassend, and S. Verghese, “Coherent lidar for ride-hailing autonomous vehicles,” inHigh-Power Diode Laser Technology XXIII, vol. 13345 ofProc. SPIE, pp. 142–161, Mar. 2025
work page 2025
-
[10]
A large-scale coherent 4D imaging sensor,
F. F. Settembrini, A. C. Gungor, A. Forrer, S. A. Fortune, A. Dell’Aquila, P. Padmanabhan, I. E. Opris, M. Sotto, N. Dordevic, Y . Perelman, T. Christen, M. Wang, and R. Nicolaescu, “A large-scale coherent 4D imaging sensor,”Nature, vol. 651, pp. 364–370, Mar. 2026
work page 2026
-
[11]
Distance and velocity measurements by the use of an orthogonal Michelson interferometer,
Y .-S. Chang, P.-Y . Chien, and M.-W. Chang, “Distance and velocity measurements by the use of an orthogonal Michelson interferometer,” Appl. Optics, vol. 36, pp. 258–265, Jan. 1997
work page 1997
-
[12]
Certain topics in telegraph transmission theory,
H. Nyquist, “Certain topics in telegraph transmission theory,”Trans. Am. Inst. Electr. Eng., vol. 47, pp. 617–644, Apr. 1928
work page 1928
-
[13]
Communication in the presence of noise,
C. Shannon, “Communication in the presence of noise,”Proc. IRE, vol. 37, pp. 10–21, Jan. 1949
work page 1949
-
[14]
Distance recovery via swept frequency mixing for data-efficient FMCW LiDAR,
N. Kim, M. U. Jung, H. Jang, and C.-S. Kim, “Distance recovery via swept frequency mixing for data-efficient FMCW LiDAR,”Opt. Lett., vol. 48, pp. 3657–3660, Jul 2023
work page 2023
-
[15]
D. Nordin and K. Hyypp ¨a, “Advantages of a new modulation scheme in an optical self-mixing frequency-modulated continuous-wave system,” Opt. Eng., vol. 41, May 2002. Art no. 1128
work page 2002
-
[16]
Low-noise frequency-agile photonic integrated lasers for coherent ranging,
G. Lihachev, J. Riemensberger, W. Weng, J. Liu, H. Tian, A. Siddharth, V . Snigirev, V . Shadymov, A. V oloshin, R. N. Wang, J. He, S. A. Bhave, and T. J. Kippenberg, “Low-noise frequency-agile photonic integrated lasers for coherent ranging,”Nat. Commun., vol. 13, June 2022
work page 2022
-
[17]
Arbitrary waveform frequency modulated continuous wave LiDAR system,
A. Pang, Z. Yan, T. Zhang, Y . Hai, and A. Dang, “Arbitrary waveform frequency modulated continuous wave LiDAR system,”IEEE Trans. Intrum. Meas., vol. 74, 2025. Art. no. 1009411
work page 2025
-
[18]
H. Pan, Z. Chen, L. Chen, and H. Hong, “Major technical barriers and a high-precision distance measurement method for frequency modulated continuous wave LiDAR,”Opt. Lasers Eng., vol. 183, Dec. 2024. Art. no. 108494
work page 2024
-
[19]
Single tone parameter estimation from discrete- time observations,
D. Rife and R. Boorstyn, “Single tone parameter estimation from discrete- time observations,”IEEE Trans. Inform. Theory, vol. 20, pp. 591–598, Sept. 1974
work page 1974
-
[20]
T. Kim, P. Bhargava, and V . Stojanovic, “Optimal spectral estimation and system trade-off in long-distance frequency-modulated continuous-wave lidar,” inProc. IEEE Int. Conf. Acoust., Speech, and Signal Process., pp. 1583–1587, Apr. 2018
work page 2018
-
[21]
H. Tsuchida, “Frequency-modulated continuous-wave light detection and ranging with sinusoidal frequency modulation and beat phase detection,” Electron. Lett., vol. 55, no. 24, pp. 1297–1299, 2019
work page 2019
-
[22]
An introduction to matched filters,
G. Turin, “An introduction to matched filters,”IRE Trans. Inform. Theory, vol. 6, pp. 311–329, June 1960
work page 1960
-
[23]
Massively parallel coherent laser ranging using a soliton microcomb,
J. Riemensberger, A. Lukashchuk, M. Karpov, W. Weng, E. Lucas, J. Liu, and T. J. Kippenberg, “Massively parallel coherent laser ranging using a soliton microcomb,”Nature, vol. 581, pp. 164–170, May 2020. 20
work page 2020
-
[24]
Laser frequency sweep linearization by iterative learning pre-distortion for FMCW LiDAR,
X. Zhang, J. Pouls, and M. C. Wu, “Laser frequency sweep linearization by iterative learning pre-distortion for FMCW LiDAR,”Opt. Express, vol. 27, pp. 9965–9974, Apr. 2019
work page 2019
-
[25]
Demonstration of high output power DBR laser integrated with SOA for the FMCW LiDAR system,
G. Zhang, Z. Ding, K. Wang, C. Jiang, J. Lou, Q. Lu, and W. Guo, “Demonstration of high output power DBR laser integrated with SOA for the FMCW LiDAR system,”Opt. Express, vol. 30, pp. 2599–2609, Jan. 2022
work page 2022
-
[26]
Cubic meter volume optical coherence tomography,
Z. Wang, B. Potsaid, L. Chen, C. Doerr, H.-C. Lee, T. Nielson, V . Jayaraman, A. E. Cable, E. Swanson, and J. G. Fujimoto, “Cubic meter volume optical coherence tomography,”Optica, vol. 3, pp. 1496–1503, Dec. 2016
work page 2016
-
[27]
High- accuracy range-sensing system based on FMCW using low-cost VCSEL,
T. Hariyama, P. A. M. Sandborn, M. Watanabe, and M. C. Wu, “High- accuracy range-sensing system based on FMCW using low-cost VCSEL,” Opt. Express, vol. 26, pp. 9285–9297, Apr. 2018
work page 2018
-
[28]
M. Okano and C. Chong, “Swept source lidar: simultaneous FMCW ranging and nonmechanical beam steering with a wideband swept source,” Opt. Express, vol. 28, p. 23898, Aug. 2020
work page 2020
-
[29]
C. Sun, Z. Chen, S. Ye, J. Lin, W. Shi, B. Li, F. Teng, X. Li, and A. Zhang, “Highly-time-resolved FMCW LiDAR with synchronously- nonlinearity-corrected acquisition for dynamic locomotion,”Opt. Express, vol. 31, pp. 7774–7788, Feb. 2023
work page 2023
-
[30]
Nonlinear correction of FMCW LIDAR based on the superlets transform algorithm,
J. Feng, X. Zhao, Y . Qiu, Q. Zhong, Y . Dong, S. Zheng, and T. Hu, “Nonlinear correction of FMCW LIDAR based on the superlets transform algorithm,”Opt. Lett., vol. 50, pp. 1389–1392, Feb. 2025
work page 2025
-
[31]
Z. Gong, X. Tong, C. Teng, M. Chen, Y . Cheng, L. Yuan, and S. Deng, “FMCW laser ranging system based on equal-frequency resampling with direct injection current modulaton,”Opt. Express, vol. 33, pp. 20981– 20992, May 2025
work page 2025
-
[32]
Investigation of tunable single frequency diode lasers for sensor applications,
E. Strzelecki, D. Cohen, and L. Coldren, “Investigation of tunable single frequency diode lasers for sensor applications,”J. Lightwave Technol., vol. 6, pp. 1610–1618, Oct. 1988
work page 1988
-
[33]
A. Vasilyev,The optoelectronic swept-frequency laser and its applications in ranging, three-dimensional imaging, and coherent beam combining of chirped-seed amplifiers. Ph.D. dissertation, California Institute of Technology, 2013
work page 2013
-
[34]
Hybrid integrated ultralow-linewidth and fast-chirped laser for FMCW LiDAR,
L. Tang, L. Li, J. Li, and M. Chen, “Hybrid integrated ultralow-linewidth and fast-chirped laser for FMCW LiDAR,”Opt. Express, vol. 30, pp. 30420–30429, Aug. 2022
work page 2022
-
[35]
Phase unwrapping in correlated noise for FMCW lidar depth estimation,
A. Ulvog, J. Rapp, T. Koike-Akino, H. Mansour, P. Boufounos, and K. Parsons, “Phase unwrapping in correlated noise for FMCW lidar depth estimation,” inProc. IEEE Int. Conf. Acoust., Speech, and Signal Process., pp. 1–5, June 2023
work page 2023
-
[36]
A matched-filter pulse-compression system using a nonlinear FM waveform,
R. E. Milleit, “A matched-filter pulse-compression system using a nonlinear FM waveform,”IEEE Trans. Aerospace and Electronic Systems, vol. AES-6, no. 1, pp. 73–78, 1970
work page 1970
-
[37]
Waveforms design for modern radar: The chirp signal fifty + years later,
G. Galati, G. Pavan, and F. De Palo, “Waveforms design for modern radar: The chirp signal fifty + years later,” inProc. Eur. Radar Conf., (Rome, Italy), pp. 13–16, 2014
work page 2014
-
[38]
Optimal chirp waveforms for long/medium range surveillance radar,
G. Galati and G. Pavan, “Optimal chirp waveforms for long/medium range surveillance radar,” inProc. Int. Radar Symp., (Dresden, Germany), pp. 260–265, 2015
work page 2015
-
[39]
Using FMCW Doppler radar to detect targets up to the maximum unambiguous range,
K. B. Cooper, S. L. Durden, C. J. Cochrane, R. R. Monje, R. J. Dengler, and C. Baldi, “Using FMCW Doppler radar to detect targets up to the maximum unambiguous range,”IEEE Geosci. Remote Sens. Lett., vol. 14, pp. 339–343, Mar. 2017
work page 2017
-
[40]
A non-reconstruction multi-coset sampling- based algorithm for frequency estimation with FMCW lidar,
J. Gai, B. Liu, and Z. Gao, “A non-reconstruction multi-coset sampling- based algorithm for frequency estimation with FMCW lidar,”Electronics, vol. 15, Dec. 2025. Art. no. 122
work page 2025
-
[41]
Z. Wang, D. Dong, Z. Zhu, R. Ji, Z. Xiao, H. Lv, G. Xu, W. Huang, and W. Zhou, “Breaking the Nyquist limit: superlinear range extension in FMCW lidar via co-prime phase resampling and the Chinese remainder theorem,”Opt. Express, vol. 34, pp. 4808–4824, Feb. 2026
work page 2026
-
[42]
On the maximum unambiguous range of LFMCW radar,
J. Liu, Y . Zhu, and X. Zhou, “On the maximum unambiguous range of LFMCW radar,” inProc. Int. Conf. Information Technology and Computer Application (ITCA), pp. 92–94, Dec. 2019
work page 2019
-
[43]
P. Feneyrou, L. Leviandier, J. Minet, G. Pillet, A. Martin, D. Dolfi, J.-P. Schlotterbeck, P. Rondeau, X. Lacondemine, A. Rieu, and T. Midavaine, “Frequency-modulated multifunction lidar for anemometry, range finding, and velocimetry–1. Theory and signal processing,”Appl. Optics, vol. 56, pp. 9663–9675, Dec. 2017
work page 2017
-
[44]
P. Feneyrou, L. Leviandier, J. Minet, G. Pillet, A. Martin, D. Dolfi, J.-P. Schlotterbeck, P. Rondeau, X. Lacondemine, A. Rieu, and T. Midavaine, “Frequency-modulated multifunction lidar for anemometry, range finding, and velocimetry–2. Experimental results,”Appl. Optics, vol. 56, pp. 9676– 9685, Dec. 2017
work page 2017
-
[45]
S. Banzhaf and C. Waldschmidt, “Phase-coded FMCW lidar,” inProc. Eur. Signal Proc. Conf., pp. 1775–1779, Aug. 2021
work page 2021
-
[46]
Optical frequency shifted FMCW Lidar system for unambiguous measurement of distance and velocity,
Q. Na, Q. Xie, N. Zhang, L. Zhang, Y . Li, B. Chen, T. Peng, G. Zuo, D. Zhuang, and J. Song, “Optical frequency shifted FMCW Lidar system for unambiguous measurement of distance and velocity,”Opt. Lasers Eng., vol. 164, May 2023. Art. no. 107523
work page 2023
-
[47]
FMCW lidar using phase- diversity coherent detection to avoid signal aliasing,
Z. Xu, H. Zhang, K. Chen, D. Zhu, and S. Pan, “FMCW lidar using phase- diversity coherent detection to avoid signal aliasing,”IEEE Photonics Tech. Lett., vol. 31, pp. 1822–1825, Nov. 2019
work page 2019
-
[48]
Options, feasibility, and availability of 2 × 4 90 ◦ hybrids for coherent optical systems,
M. Seimetz and C.-M. Weinert, “Options, feasibility, and availability of 2 × 4 90 ◦ hybrids for coherent optical systems,”J. Lightwave Technol., vol. 24, pp. 1317–1322, Mar. 2006
work page 2006
-
[49]
IQ photonic receiver for coherent imaging with a scalable aperture,
A. Khachaturian, R. Fatemi, and A. Hajimiri, “IQ photonic receiver for coherent imaging with a scalable aperture,”IEEE Open J. Solid-State Circuts Soc., vol. 1, pp. 263–270, 2021
work page 2021
-
[50]
Kim,Realization of Integrated Coherent LiDAR
T. Kim,Realization of Integrated Coherent LiDAR. PhD thesis, University of California, Berkeley, May 2020
work page 2020
-
[51]
Frequency-modulated continuous-wave lidar using I/Q modulator for simplified heterodyne detection,
S. Gao and R. Hui, “Frequency-modulated continuous-wave lidar using I/Q modulator for simplified heterodyne detection,”Opt. Lett., vol. 37, pp. 2022–2024, June 2012
work page 2022
-
[52]
Frequency-modulated chirp signals for single-photodiode based coherent lidar system,
W. Yi, Z. Li, Z. Zhou, E. Sillekens, T. Gerard, C. Deakin, F. M. Ferreira, L. Galdino, Z. Liu, P. Bayvel, and R. I. Killey, “Frequency-modulated chirp signals for single-photodiode based coherent lidar system,”J. Lightwave Technol., vol. 39, pp. 4661–4670, July 2021
work page 2021
-
[53]
M. Armstrong,Basic Topology. Undergraduate Texts in Mathematics, Springer New York, 1983
work page 1983
-
[54]
R. P. Brent,Algorithms for minimization without derivatives. Series in Automatic Computation, Englewood Cliffs, New Jersey: Prentice-Hall, Inc., 1973
work page 1973
-
[55]
A simplex method for function minimization,
J. A. Nelder and R. Mead, “A simplex method for function minimization,” Comput. J., vol. 7, no. 4, pp. 308–313, 1965
work page 1965
-
[56]
Richards,Fundamentals of Radar Signal Processing, 3rd ed.McGraw Hill, 2022
M. Richards,Fundamentals of Radar Signal Processing, 3rd ed.McGraw Hill, 2022
work page 2022
-
[57]
B. Boashash, “Estimating and interpreting the instantaneous frequency of a signal—Part 2: Algorithms and applications,”Proc. IEEE, vol. 80, pp. 540–568, Apr. 1992
work page 1992
-
[58]
H. Fu and P.-Y . Kam, “Phase-based, time-domain estimation of the frequency and phase of a single sinusoid in AWGN—the role and applications of the additive observation phase noise model,”IEEE Trans. Inform. Theory, vol. 59, pp. 3175–3188, May 2013
work page 2013
-
[59]
Estimating the frequency of a noisy sinusoid by linear regression,
S. Tretter, “Estimating the frequency of a noisy sinusoid by linear regression,”IEEE Trans. Inform. Theory, vol. 31, pp. 832–835, Nov. 1985
work page 1985
-
[60]
The convergence of a class of double-rank minimization algorithms 1. general considerations,
C. G. Broyden, “The convergence of a class of double-rank minimization algorithms 1. general considerations,”IMA J. Appl. Math., vol. 6, pp. 76– 90, 03 1970
work page 1970
-
[61]
A new approach to variable metric algorithms,
R. Fletcher, “A new approach to variable metric algorithms,”Comput. J., vol. 13, pp. 317–322, 01 1970
work page 1970
-
[62]
A family of variable-metric methods derived by variational means,
D. Goldfarb, “A family of variable-metric methods derived by variational means,”Math. Comput., vol. 24, no. 109, pp. 23–26, 1970
work page 1970
-
[63]
Conditioning of quasi-Newton methods for function minimization,
D. F. Shanno, “Conditioning of quasi-Newton methods for function minimization,”Math. Comput., vol. 24, no. 111, pp. 647–656, 1970
work page 1970
-
[64]
Cramer–Rao bounds for misspecified models,
Q. H. Vuong, “Cramer–Rao bounds for misspecified models,” Social Science Working Paper 652, California Institute of Technology, Oct. 1986
work page 1986
-
[65]
S. Fortunati, F. Gini, M. S. Greco, and C. D. Richmond, “Performance bounds for parameter estimation under misspecified models: Fundamental findings and applications,”IEEE Signal Process. Mag., vol. 34, no. 6, pp. 142–157, 2017
work page 2017
-
[66]
Enhanced high-resolution and long-range FMCW LiDAR with directly modulated semiconductor lasers,
L. C. P. Pinto and M. C. R. Medeiros, “Enhanced high-resolution and long-range FMCW LiDAR with directly modulated semiconductor lasers,” Sensors, vol. 25, no. 13, 2025. Art. no. 4131
work page 2025
-
[67]
T.-J. Ahn and D. Y . Kim, “Analysis of nonlinear frequency sweep in high-speed tunable laser sources using a self-homodyne measurement and Hilbert transformation,”Appl. Optics, vol. 46, pp. 2394–2400, May 2007
work page 2007
-
[68]
Ultrafast tunable photonic-integrated extended-DBR Pockels laser,
A. Siddharth, S. Bianconi, R. N. Wang, Z. Qiu, A. S. V oloshin, M. J. Bereyhi, J. Riemensberger, and T. J. Kippenberg, “Ultrafast tunable photonic-integrated extended-DBR Pockels laser,”Nature Photon., vol. 19, pp. 709–717, July 2025
work page 2025
-
[69]
Multiridge detection and time-frequency reconstruction,
R. Carmona, W. Hwang, and B. Torresani, “Multiridge detection and time-frequency reconstruction,”IEEE Trans. Signal Process., vol. 47, no. 2, pp. 480–492, 1999
work page 1999
-
[70]
Q. Legros and D. Fourer, “Estimation of instantaneous frequency and amplitude of multi-component signals using sparse modeling of signal innovation,” inProc. Eur. Signal Proc. Conf., pp. 2502–2506, 2024
work page 2024
-
[71]
Z. Li, Z. Gao, F. Sun, J. Gao, and W. Zhang, “Instantaneous frequency extraction for nonstationary signals via a squeezing operator with a 21 fixed-point iteration method,”Remote Sens., vol. 16, no. 8, 2024. Art. no. 1412
work page 2024
-
[72]
Z. Chen and H.-T. Wu, “Disentangling modes with crossover instanta- neous frequencies by synchrosqueezed chirplet transforms, from theory to application,”Appl. Comput. Harmon. Anal., vol. 62, pp. 84–122, 2023
work page 2023
-
[73]
An improved multi-ridge extraction method based on differential synchro-squeezing wavelet transform,
Y . Li, Z. Wang, T. Zhao, and W. Song, “An improved multi-ridge extraction method based on differential synchro-squeezing wavelet transform,”IEEE Access, vol. 9, pp. 96763–96774, 2021
work page 2021
-
[74]
R. Zheng, C. Wang, X. He, and X. Li, “A correction method for the nonlinearity of FMCW radar sensors based on multisynchrosqueezing transform,”IEEE Sensors J., vol. 23, pp. 609–619, Jan. 2023
work page 2023
-
[75]
Time- frequency super-resolution with superlets,
V . V . Moca, H. Bˆarzan, A. Nagy-D ˘abˆacan, and R. C. Mure s,an, “Time- frequency super-resolution with superlets,”Nat. Commun., vol. 12, p. 337, Jan. 2021
work page 2021
-
[76]
On unlimited sampling and reconstruction,
A. Bhandari, F. Krahmer, and R. Raskar, “On unlimited sampling and reconstruction,”IEEE Trans. Signal Process., vol. 69, pp. 3827–3839, 2021
work page 2021
-
[77]
Amari,Information Geometry and Its Applications
S. Amari,Information Geometry and Its Applications. Tokyo: Springer, 1st ed., 2016
work page 2016
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.