Recognition: no theorem link
UAV Energy Consumption Models for Wireless Systems Research: Model Selection and Misconceptions
Pith reviewed 2026-05-15 01:58 UTC · model grok-4.3
The pith
Using the wrong energy consumption model for UAVs produces large errors in wireless systems calculations.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper shows that many wireless systems studies apply energy consumption models outside their intended scope for UAV type or flight phase, producing significant numerical errors in calculated power draw. By excluding data-driven and highly complex models, the review supplies clear selection guidelines based on rotary-wing versus fixed-wing aircraft and on phases such as hovering, climbing, and level flight. It documents how these mismatches arise and quantifies the resulting deviations in energy totals.
What carries the argument
UAV energy consumption models tied to specific aircraft categories and flight phases that compute instantaneous power for wireless service tasks.
If this is right
- Trajectory optimization routines that rely on energy models will produce more reliable flight paths once the correct model is chosen for the UAV type and phase.
- Deployment feasibility studies for UAV-enabled wireless networks will yield tighter bounds on required battery capacity and mission duration.
- Researchers can avoid repeated errors by checking model applicability against the UAV category and flight phase before use.
- New model development should target the flight phases and UAV types still missing from current literature.
Where Pith is reading between the lines
- Wireless network simulators could embed automatic model-selection checks to reduce the frequency of scope-mismatch errors.
- Real-world UAV battery-life predictions in communication networks may be off by the same margins shown in the reviewed misapplications.
- Extending the review to include data-driven models would test whether the selection guidelines remain useful when empirical fitting is allowed.
Load-bearing premise
The reviewed models and documented mistakes accurately reflect the range of practices now used in wireless systems research.
What would settle it
A direct numerical comparison, for one fixed UAV trajectory, of energy totals obtained from a model applied inside its documented scope versus the same trajectory computed with a model taken from outside that scope.
Figures



read the original abstract
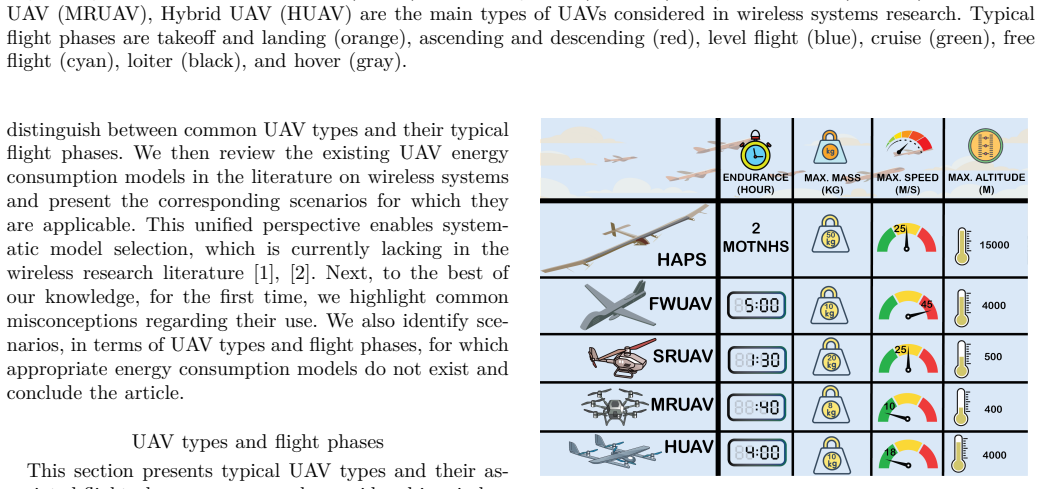
Uncrewed aerial vehicles (UAVs) are gaining increasing attention in wireless systems, providing new opportunities to expand the reach and improve the quality of wireless services. Despite their versatility, UAVs are limited by available energy onboard, which results in significant challenges in deploying UAV-enabled wireless systems. Modeling energy consumption is an essential component of the deployment and trajectory optimization of UAVs. This article presents a comprehensive overview of UAV energy consumption models, with a focus on their relevance to wireless systems research. We deliberately exclude data-driven and overly complex models to provide clear and practical guidelines for their use in wireless systems research. We begin by categorizing the most common types of UAVs and describing the typical flight phases considered in the literature. We then review existing energy consumption models, focusing on their scope with respect to UAV types and flight phases. We also discuss common mistakes in the use of these models and highlight the existing gaps in the literature. In particular, we show how the use of a wrong model can lead to significant errors in energy consumption calculations. Finally, we emphasize the need to develop energy consumption models for missing scenarios.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript surveys UAV energy consumption models relevant to wireless systems research. It categorizes UAV types and typical flight phases, reviews existing models by their applicability and scope, identifies common misconceptions in model selection and use, supplies concrete numerical examples demonstrating significant errors in energy calculations from incorrect model choices, and notes gaps for unaddressed scenarios while explicitly justifying the exclusion of data-driven and complex models.
Significance. If the reviewed models and error examples hold, the work offers practical value by distilling guidelines for model selection in UAV-enabled wireless research, where energy constraints directly affect trajectory optimization and deployment. Credit is due to the explicit numerical comparisons that quantify calculation errors and to the bounded scope that keeps the guidance accessible without overclaiming universality.
minor comments (3)
- In the model categorization section, the notation for power terms (e.g., induced power, profile power) varies across reviewed models; a consolidated table mapping equivalent terms would improve cross-model comparison.
- [Misconceptions and examples] The numerical error examples would benefit from an explicit statement of the assumed UAV mass, speed profile, and flight phase duration to facilitate exact reproduction by readers.
- The gaps discussion lists missing scenarios but does not quantify their frequency in recent wireless UAV papers; adding a brief citation count or example application would strengthen the call for future work.
Simulated Author's Rebuttal
We thank the referee for the positive review, the recognition of the manuscript's practical value in distilling model-selection guidelines, and the recommendation to accept. We appreciate the credit given to the numerical error examples and the bounded scope.
Circularity Check
No significant circularity
full rationale
The paper is a delimited survey synthesizing existing UAV energy models, categorizing flight phases, reviewing literature models, and illustrating misapplication errors via concrete numerical comparisons drawn from prior works. No new derivations, fitted parameters, or predictions are introduced that reduce to internal definitions or self-citations. Central claims rest on external references and explicit examples rather than any load-bearing self-referential step. This matches the default non-circular outcome for review papers with independent external support.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Existing propulsion and communication energy models from the literature are sufficiently accurate and representative for wireless systems research when used within their stated scope.
Reference graph
Works this paper leans on
-
[1]
A tutorial on UA Vs for wireless networks: Applications, chal- lenges, and open problems,
M. Mozaffari, W. Saad, M. Bennis, Y.-H. Nam, and M. Debbah, “A tutorial on UA Vs for wireless networks: Applications, chal- lenges, and open problems,” IEEE Communications Surveys & Tutorials, vol. 21, no. 3, pp. 2334–2360, 2019
work page 2019
-
[2]
A survey on UA V-assisted wireless com- munications: Recent advances and future trends,
X. Gu and G. Zhang, “A survey on UA V-assisted wireless com- munications: Recent advances and future trends,” Computer Communications, vol. 208, pp. 44–78, 2023
work page 2023
-
[3]
Energy-efficient UA V communication with trajectory optimization,
Y. Zeng and R. Zhang, “Energy-efficient UA V communication with trajectory optimization,” IEEE Transactions on Wireless Communications, vol. 16, no. 6, pp. 3747–3760, 2017
work page 2017
-
[4]
Energy minimization for wireless communication with rotary-wing UA V,
Y. Zeng, J. Xu, and R. Zhang, “Energy minimization for wireless communication with rotary-wing UA V,” IEEE Transactions on Wireless Communications, vol. 18, no. 4, pp. 2329–2345, 2019
work page 2019
-
[5]
M. Barzegaran and H. Jafarkhani, “Dynamic deployment of het- erogeneous wireless sensor drone networks with limited commu- nication range,” IEEE Transactions on Vehicular Technology, vol. 75, no. 1, pp. 548–563, 2025
work page 2025
-
[6]
Energy efficient UA V communication with energy harvesting,
Z. Yang, W. Xu, and M. Shikh-Bahaei, “Energy efficient UA V communication with energy harvesting,” IEEE Transactions on Vehicular Technology, vol. 69, no. 2, pp. 1913–1927, 2019
work page 1913
-
[7]
X. Xiong, C. Sun, W. Ni, and X. Wang, “Three-dimensional trajectory design for unmanned aerial vehicle-based secure and energy-efficient data collection,” IEEE Transactions on Vehicular Technology, vol. 72, no. 1, pp. 664–678, 2022
work page 2022
-
[8]
A vision and framework for the high altitude platform sta- tion (HAPS) networks of the future,
G. K. Kurt, M. G. Khoshkholgh, S. Alfattani, A. Ibrahim, T. S. Darwish, M. S. Alam, H. Yanikomeroglu, and A. Yongacoglu, “A vision and framework for the high altitude platform sta- tion (HAPS) networks of the future,” IEEE Communications Surveys & Tutorials, vol. 23, no. 2, pp. 729–779, 2021
work page 2021
-
[9]
Optimization of hybrid laser-battery- powered UA V-assisted backscatter communications,
A. M. Abdelhady, C. Diaz-Vilor, M. Barzegaran, H. Jafarkhani, and A. M. Eltawil, “Optimization of hybrid laser-battery- powered UA V-assisted backscatter communications,” IEEE Transactions on Communications, vol. 73, no. 11, pp. 11690– 11706, 2025
work page 2025
-
[10]
Modeling power consumptions for multirotor UA Vs,
H. Gong, B. Huang, B. Jia, and H. Dai, “Modeling power consumptions for multirotor UA Vs,” IEEE Transactions on Aerospace and Electronic Systems, vol. 59, no. 6, pp. 7409– 7422, 2023
work page 2023
-
[11]
Multi-UA V energy-efficient wildfire coverage optimization,
C. Diaz-Vilor, M. Barzegaran, and H. Jafarkhani, “Multi-UA V energy-efficient wildfire coverage optimization,” IEEE Transac- tions on Wireless Communications, vol. 24, no. 10, pp. 8633– 8648, 2025
work page 2025
-
[12]
Thrust control for multirotor aerial vehicles,
M. Bangura and R. Mahony, “Thrust control for multirotor aerial vehicles,” IEEE Transactions on Robotics, vol. 33, no. 2, pp. 390–405, 2017. 8
work page 2017
-
[13]
Modeling and validation of electric multirotor unmanned aerial vehicle system energy dynamics,
N. Michel, P. Wei, Z. Kong, A. K. Sinha, and X. Lin, “Modeling and validation of electric multirotor unmanned aerial vehicle system energy dynamics,” eTransportation, vol. 12, p. 100173, 2022
work page 2022
-
[14]
Energy-efficient 3-D UA V ground node accessing using the minimum number of UA Vs,
H. Gong, B. Huang, and B. Jia, “Energy-efficient 3-D UA V ground node accessing using the minimum number of UA Vs,” IEEE Transactions on Mobile Computing, 2024
work page 2024
-
[15]
R. Ding, F. Gao, and X. S. Shen, “3D UA V trajectory design and frequency band allocation for energy-efficient and fair com- munication: A deep reinforcement learning approach,” IEEE Transactions on Wireless Communications, vol. 19, no. 12, pp. 7796–7809, 2020. Biographies M ohammadreza Barzegaran is a Postdoctoral Scholar at the Univer- sity of California...
work page 2020
-
[16]
Space-Time Coding: Theory and Practice
He is a Fellow of AAAS, Society of Cardiovascular Magnetic Resonance (SCMR), and National Academy of Inventors (NAI). He is the author of the book “Space-Time Coding: Theory and Practice. ”
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.