Recognition: 2 theorem links
· Lean TheoremNonlinear Multiphysics Modeling of Batch Digester Discharge Dynamics with Rheology-Driven Hydraulic Transport and Drainability Coupling
Pith reviewed 2026-05-15 01:37 UTC · model grok-4.3
The pith
A nonlinear model coupling non-Newtonian rheology and drainability enables sliding mode control of batch digester discharge flow.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that a nonlinear multiphysics model integrating non-Newtonian slurry rheology, consistency-dependent hydraulic resistance, drainability effects, channeling phenomena, and nonlinear hydraulic transport behavior yields a controllable description of batch digester discharge dynamics that sliding mode control can regulate robustly.
What carries the argument
The nonlinear dynamic model that couples rheology-driven hydraulic transport with drainability and consistency dependence, paired with a sliding mode control law for flow regulation.
If this is right
- The model predicts how changing slurry consistency alters hydraulic resistance and outflow rates during blowdown.
- Sliding mode control maintains target flow despite uncertainties in rheology and drainability parameters.
- Inclusion of channeling phenomena refines the description of flow paths inside the digester.
- Drainability coupling links liquid removal rates directly to the overall transport dynamics.
Where Pith is reading between the lines
- The same coupling structure could be tested on other non-Newtonian discharge systems such as mineral slurries or food processing.
- If validated, the model structure might guide sensor placement for real-time consistency estimation.
- Extensions could explore whether the same sliding mode framework handles multi-digester networks or batch-to-batch variations.
Load-bearing premise
The non-Newtonian rheology, consistency-dependent resistance, and drainability can be combined into one tractable nonlinear dynamic model that stays controllable by sliding mode methods without large unmodeled effects taking over.
What would settle it
Real-time discharge flow measurements from an operating batch digester that deviate sharply from the model's predicted trajectories when slurry consistency and rheological parameters vary across the expected operating range.
Figures




read the original abstract
Batch digester blowdown operations exhibit highly nonlinear hydraulic transport dynamics due to evolving slurry consistency and rheological uncertainty. This work presents a nonlinear dynamic model and a robust Sliding Mode Control (SMC) strategy for discharge-flow regulation in industrial batch digester systems. The proposed framework incorporates non-Newtonian slurry rheology, consistency-dependent hydraulic resistance, drainability effects, channeling phenomena, and nonlinear hydraulic transport behavior.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper develops a nonlinear dynamic model for batch digester discharge dynamics that couples non-Newtonian slurry rheology, consistency-dependent hydraulic resistance, drainability effects, channeling phenomena, and nonlinear hydraulic transport. It proposes a robust Sliding Mode Control (SMC) strategy for discharge-flow regulation, with the state-space form explicitly constructed in §§2–3 and finite-time convergence of the closed-loop system established via Lyapunov analysis in §4.2 under bounded uncertainty.
Significance. If the model derivations and stability results hold under realistic operating conditions, the work supplies a tractable multiphysics framework and an explicitly constructed SMC law for an industrially relevant nonlinear control problem. The explicit sliding-surface design and Lyapunov-based finite-time guarantee constitute a clear methodological contribution that could inform robust regulation strategies in chemical-process systems handling non-Newtonian flows.
major comments (2)
- [§4.2] §4.2: The Lyapunov analysis establishes finite-time convergence under the assumption of a known uncertainty bound, yet the manuscript does not derive or calibrate this bound from the rheology and consistency-dependent resistance terms introduced in §2; this omission is load-bearing for the robustness claim.
- [§5] §5 (simulation section): Performance is illustrated only through nominal trajectories; no quantitative robustness metrics (e.g., settling-time statistics or sensitivity to rheology-parameter variation) are reported, weakening the evaluation of the controller under the very uncertainties the model claims to address.
minor comments (2)
- The abstract omits any reference to the state-space representation or the Lyapunov result, which are the paper’s central technical contributions.
- [§2] §2: The functional form chosen for the consistency-dependent hydraulic resistance is introduced without an explicit equation label, complicating cross-references in later sections.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on our manuscript. We address each major point below and indicate the revisions we will incorporate to strengthen the robustness claims.
read point-by-point responses
-
Referee: [§4.2] The Lyapunov analysis establishes finite-time convergence under the assumption of a known uncertainty bound, yet the manuscript does not derive or calibrate this bound from the rheology and consistency-dependent resistance terms introduced in §2; this omission is load-bearing for the robustness claim.
Authors: We agree that an explicit derivation of the uncertainty bound from the §2 rheology and hydraulic-resistance terms would make the robustness guarantee more rigorous. In the revised manuscript we will insert a new subsection in §4.2 that derives an analytic expression for the bound Δ in terms of the power-law index, yield stress, and consistency-dependent friction factor, together with a calibration procedure based on the operating ranges of slurry consistency reported in the literature. revision: yes
-
Referee: [§5] Performance is illustrated only through nominal trajectories; no quantitative robustness metrics (e.g., settling-time statistics or sensitivity to rheology-parameter variation) are reported, weakening the evaluation of the controller under the very uncertainties the model claims to address.
Authors: We acknowledge that the current §5 presents only nominal closed-loop trajectories. We will expand this section with a dedicated robustness subsection that includes Monte-Carlo simulations over ±20 % variations in the rheological parameters (consistency index and yield stress) and reports quantitative metrics: mean and standard deviation of settling time, overshoot, and integral square error, together with a sensitivity plot of these metrics versus the uncertainty bound. revision: yes
Circularity Check
No significant circularity detected in derivation chain
full rationale
The paper constructs a nonlinear state-space model from first-principles multiphysics coupling of rheology, consistency-dependent resistance, drainability, and channeling, then designs an explicit sliding surface and equivalent control law whose Lyapunov stability is shown under bounded uncertainty. No equation reduces to a fitted parameter renamed as prediction, no self-citation supplies a uniqueness theorem that forces the result, and no ansatz is smuggled in via prior work. The central claim remains an independent modeling and control construction whose controllability follows from the stated assumptions without circular reduction to inputs.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
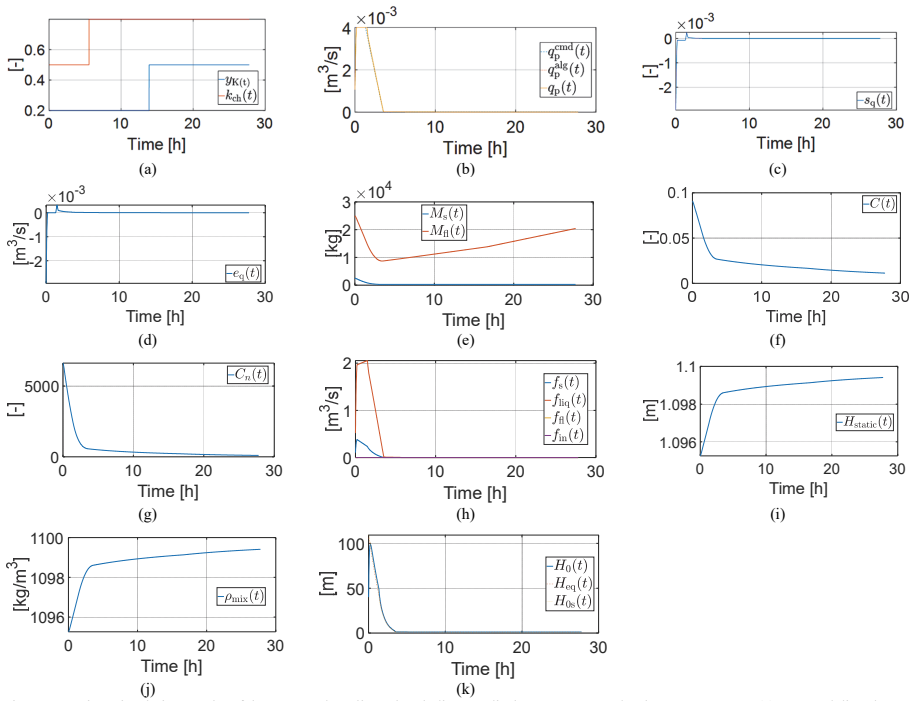
The rheological behavior of the pulp suspension is represented through the Herschel–Bulkley constitutive framework, τ(t) = τy + KHB·γ̇n(t) ... consistency-dependent hydraulic resistance Cn(t) = Kref·(C(t)+ε/Cref)^αC ... qp_alg(t) = [max(H0(t)−Hstatic(t),0)/(Cn(t)+ε)]^(1/n)
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Sliding surface sq(t) = eq(t) + λq·ξeq(t) ... equivalent control Heq(t) = Hstatic(t) + (Cn(t)+ε)·(qpcmd(t))^n ... Lyapunov V(sq) = ½ sq²
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Development of a comprehensive nonlinear dynamic model for batch digester blowdown operation incorporating multiphase transport, nonlinear rheology, dynamic drainage behavior, and consistency- dependent hydraulic resistance
-
[2]
Integration of channeling effects and drainability di sturbances into the nonlinear hydraulic transport formulation
-
[3]
Formulation of a robust SMC arch itecture specifically designed for nonlinear discharge-flow regulation under severe rheological uncertainty and transport disturbances
-
[4]
Implementation of numerical regularization and protection mechanisms enabling stable long-time simulation of the strongly nonlinear differential-algebraic process
-
[5]
Evaluation of the proposed controller through transient simulations under severe nonlinear disturbances and evolving transport conditions. The obtained results demonstrate that the proposed nonlinear SMC framework provides robust discharge-flow tracking, bounded hydraulic actuation, strong disturbance rejection capability, and stable energetic behavior de...
-
[6]
N. Bijok, J. Fiskari, R. R. Gustafson, and V. Alopaeus, “Chip scale modelling of the kraft pulping process by considering the heterogeneous nature of the lignocellulosic feedstock,” Chemical Engineering Research and Design, vol. 193, pp. 13–27, May 2023
work page 2023
-
[7]
M. Ek, G. Gellerstedt, and G. Henriksson, Pulping Chemistry and Technology. Walter de Gruyter, 2009
work page 2009
-
[8]
Empie, Fundamentals of the Kraft Recovery Process
J. Empie, Fundamentals of the Kraft Recovery Process. TAPPI JOURNAL, 2022
work page 2022
-
[9]
Dynamic modeling of kraft pulping of sout hern pine based on on-line liquor analysis ,
S. Vanchinathan and G. Krishnagopalan, “Dynamic modeling of kraft pulping of sout hern pine based on on-line liquor analysis ,” Tappi Journal, 1997
work page 1997
-
[10]
Recovery of ch emicals and energy
Papermaking Science and Tec hnology: Chemical pulping. Recovery of ch emicals and energy. Book 6. Part 2 . Paper Engineers’ Association/Paperi ja Puu Oy, 2008
work page 2008
-
[11]
D ynamic modelling and scheduling of an industrial batch system,
P. Castro, H. Matos, and A. P. F. D. Barbosa-Póvoa, “D ynamic modelling and scheduling of an industrial batch system,” Computers & Chemical Engineering, vol. 26, no. 4, pp. 671–686, May 2002
work page 2002
-
[12]
Rheology of pulp fibre suspensions: A criti cal review,
B. Derakhshandeh, R. J. Kerekes, S. G. Hatzikiriakos, and C. P. J. Bennington, “Rheology of pulp fibre suspensions: A criti cal review,” Chemical Engineering Science, vol. 66, no. 15, pp. 3460–3470, Aug. 2011
work page 2011
-
[13]
Dynamic Modeling and Control System Analysis for Continuous-Disc Filters in Pulp Mill Operations,
J. M. Campos-Salazar, F. Santander, and S. Larraín, “Dynamic Modeling and Control System Analysis for Continuous-Disc Filters in Pulp Mill Operations,” Sept. 2025
work page 2025
-
[14]
The yield stress of fibre suspensions,
C. P. J. Bennington, R. J. Kerekes, and J. R. Grace, “The yield stress of fibre suspensions,” The Canadian Journal of Chemical Engineering, vol. 68, no. 5, pp. 748–757, 1990
work page 1990
-
[15]
Pike, Optimization for Engineering Systems
R. Pike, Optimization for Engineering Systems. New York, 1986
work page 1986
-
[16]
Rhology of fi bre suspensions in papermaking: An overview of recent research,
R. Kerekes, “Rhology of fi bre suspensions in papermaking: An overview of recent research,” Nordic Pulp and Paper Research Journal , vol. 21, pp. 598–612, Dec. 2006
work page 2006
-
[17]
Permeability of pulp fiber mats with filler particles,
R. Singh, S. Lavrykov, and B. V. Ramarao, “Permeability of pulp fiber mats with filler particles,” Colloids and Surfaces A: Physicochemical and Engineering Aspects, vol. 333, no. 1, pp. 96–107, Feb. 2009
work page 2009
-
[18]
Non-Newtonian behavi our of suspensions and emulsions: Review of different mechanisms,
R. Pal, “Non-Newtonian behavi our of suspensions and emulsions: Review of different mechanisms,” Advances in Colloid and Interface Science, vol. 333, p. 103299, Nov. 2024
work page 2024
-
[19]
The rheology of fibre suspensions,
C. J. S. Petrie, “The rheology of fibre suspensions,” Journal of Non-Newtonian Fluid Mechanics, vol. 87, no. 2, pp. 369–402, Nov. 1999
work page 1999
-
[20]
Flow dynamics of pulp fiber suspensions,
C. Ventura, F. Garcia, P. Ferreira, and M. Ra steiro, “Flow dynamics of pulp fiber suspensions,” TAPPI Journal, vol. 7, pp. 20–26, Sept. 2008
work page 2008
-
[21]
R. P. Chhabra and J. F. Richardson, Non-Newtonian Flow and Applied Rheology: Engineering Applications. Butterworth-Heinemann, 2011
work page 2011
-
[22]
Chemical process control education and practice,
B. Bequette and B. Ogunnaike, “Chemical process control education and practice,” Control Systems, IEEE, vol. 21, pp. 10–17, May 2001
work page 2001
-
[23]
W. L. Luyben, Process Modeling, Simulation and Control for Chemical Engineers, Subsequent edition. New York: McGraw-Hill College, 1989
work page 1989
-
[24]
Dynam ic Modeling and Control of Ph osphate-Pebble Drying Systems—A Comprehensive Approach,
J. M. Campos-Salazar, F. Santander, and E. Keim, “Dynam ic Modeling and Control of Ph osphate-Pebble Drying Systems—A Comprehensive Approach,” ENERGY, vol. 0, no. 0, pp. 1–10, 2026
work page 2026
-
[25]
J. M. Campos-Salazar, P. Lecaros, and R. Sandoval-García, “D ynamic analysis and comparison of the performance of linear and nonlinear controllers applied to a nonlinear non-interactive and interactive process,” AIMS Electronics and Electrical Engineering, vol. 8, no. 4, pp. 441–465, Nov. 2024
work page 2024
-
[26]
Transport phenomena in moderate ly concentrated suspensions of rigid spheres,
D. Lhuillier, “Transport phenomena in moderate ly concentrated suspensions of rigid spheres,” Physica A: Statistical Mechanics and its Applications, vol. 165, no. 3, pp. 303–319, June 1990
work page 1990
-
[27]
K. J. Astrouml;m and T. Hauml;gglund, Advanced PID Control. Research Triangle Park, NC: Wiley, 2006
work page 2006
-
[28]
(PDF) Feedback Systems: An In troduction for Scientists and Engineers,
“(PDF) Feedback Systems: An In troduction for Scientists and Engineers,” ResearchGate. [Online]. Available: https://www.researchgate.net/publication/36721090_Feedback_Systems_An_Introduction_for_Scientists_and_Engineers. [Accessed: 13- May-2026]
-
[29]
C. Edwards and S. Spurgeon, Sliding Mode Control: Theory And Applications. CRC Press, 1998
work page 1998
-
[30]
A control engineer’s guide to sliding mode control,
K. D. Young, V. I. Utkin, and U. Ozguner, “A control engineer’s guide to sliding mode control,” IEEE Transactions on Control Systems Technology, vol. 7, no. 3, pp. 328–342, May 1999
work page 1999
-
[31]
Khalil, Nonlinear Control, 1st edition
H. Khalil, Nonlinear Control, 1st edition. Boston: Pearson, 2014
work page 2014
-
[32]
J.-J. Slotine and W. Li, Applied Nonlinear Control. Englewood Cliffs, NJ: Pearson, 1991
work page 1991
-
[33]
Continuous fin ite-time control for robotic manipulators with terminal sliding m ode,
S. Yu, X. Yu, B. Shirinzadeh, and Z. Man, “Continuous fin ite-time control for robotic manipulators with terminal sliding m ode,” Automatica, vol. 41, no. 11, pp. 1957–1964, Nov. 2005
work page 1957
-
[34]
E. Heydari, A. Y. Varjani, and D. Diallo, “Fast terminal sliding mode control-based direct power control for single-stage single-phase PV system,” Control Engineering Practice, vol. 104, p. 104635, Nov. 2020
work page 2020
-
[35]
(PDF) Higher-order sliding modes, di fferentiation and output-feedback control,
“(PDF) Higher-order sliding modes, di fferentiation and output-feedback control,” ResearchGate
-
[36]
Liu, Sliding Mode Control Using MATLAB
J. Liu, Sliding Mode Control Using MATLAB. Academic Press, 2017
work page 2017
-
[37]
A. Carlson, C. Narayanan, and D. La kehal, “Simulation of Liquor Bl ow, Thrust Force, and Risk of Condensation Hydraulic Sho ck in a Pulp-Digester Piping System,” J. Pressure Vessel Technol, vol. 145, no. 041401, May 2023
work page 2023
-
[38]
A Review on the Modeling, Control a nd Diagnostics of Continuous Pulp Digesters,
M. Rahman, A. Avelin, and K. Kypriani dis, “A Review on the Modeling, Control a nd Diagnostics of Continuous Pulp Digesters, ” Processes, vol. 8, no. 10, p. 1231, Oct. 2020
work page 2020
-
[39]
J. Jung, H.-K. Choi, S. H. Son, J. S.-I. Kwon, and J. H. Lee, “Multiscale modeling of fiber deformation: Application to a batch pulp digester for model predictive control of fiber strength,” Computers & Chemical Engineering, vol. 158, p. 107640, Feb. 2022
work page 2022
-
[40]
Brownstock washi ng fundamentals: Enhancing drainage through chemistry
L. A. Lobo and T. S. Bolton, “Brownstock washi ng fundamentals: Enhancing drainage through chemistry.”
-
[41]
Rheology of fibre suspension flows in the pipeline hydro-transport of biomass feedstock,
A. Faghani, S. Sen, M. Va ezi, and A. Kumar, “Rheology of fibre suspension flows in the pipeline hydro-transport of biomass feedstock,” Biosystems Engineering, vol. 200, pp. 284–297, Dec. 2020
work page 2020
-
[42]
Rheology of concentrated fiber suspensions with a load- dependent friction coefficient,
M. Khan, R. V. More, A. A. Banaei, L. Brandt, and A. M. Ar dekani, “Rheology of concentrated fiber suspensions with a load- dependent friction coefficient,” Phys. Rev. Fluids, vol. 8, no. 4, p. 044301, Apr. 2023
work page 2023
-
[43]
Modeling pulp fiber suspension rheology,
M. Rasteiro, C. Balnco, C. Negre, P. Ferreira, a nd F. Garcia, “Modeling pulp fiber suspension rheology,” Tappi Journal, vol. 6, p. 17, Apr. 2007
work page 2007
-
[44]
G. G. Duffy, S. N. Kazi, and X. D. Chen, “Heat transfer and pressure drop characteristics of suspensions of synthetic and wood pulp fibres in annular flow,” Applied Thermal Engineering, vol. 31, no. 14, pp. 2971–2980, Oct. 2011
work page 2011
-
[45]
A. R. Pradhan, “Rhe ology-driven approaches in slurry transportation: Influence of bimodal mixtures, additives, and modelli ng perspectives,” Advances in Colloid and Interface Science, vol. 347, p. 103714, Jan. 2026
work page 2026
-
[46]
Mode l predictive control: Theory and practice—A survey,
C. E. García, D. M. Prett, and M. Morari, “Mode l predictive control: Theory and practice—A survey,” Automatica, vol. 25, no. 3, pp. 335– 348, May 1989
work page 1989
-
[47]
Data- driven modeling and multi-objective opt imization of a continuous kra ft pulping digester,
I. B. Correa, M. B. de Souza, and A. R. Secchi, “Data- driven modeling and multi-objective opt imization of a continuous kra ft pulping digester,” Chemical Engineering Research and Design, vol. 207, pp. 505–517, July 2024
work page 2024
-
[48]
Thermal-hydraulic modeling of a continuous pulp digester,
S. Bhartiya, Sharad, P. Dufour, Pascal, D. III, and F. J, “Thermal-hydraulic modeling of a continuous pulp digester,” June 2001
work page 2001
-
[49]
Control of batch pulping process using data-driven constr ained iterative learning control,
B. Shibani, P. Ambure, A. Purohit, P. Suratia, and S. Bhartiya, “Control of batch pulping process using data-driven constr ained iterative learning control,” Computers & Chemical Engineering, vol. 170, p. 108138, Feb. 2023
work page 2023
-
[50]
H. Eloranta, Fluid Mechanics of the Papermaki ng Machine Headbox: Instabilities and Disturbances in the Slice Chamber . Tampere University of Technology, 2005
work page 2005
-
[51]
M. Saqib, Hashim, and M. Farooq, “Ene rgy transport and entropy analysis for non-Newtonian Sutterby nanofluid flow through intersecting planes,” Results in Engineering, vol. 29, p. 108401, Mar. 2026
work page 2026
-
[52]
S. Saeed, F. Ein-Mozaffari, and S. R. Upreti, “Using Computational Fluid Dynami cs Modeling and Ultrasonic Doppler Velocime try To Study Pulp Suspension Mixing,” Ind. Eng. Chem. Res., vol. 46, no. 7, pp. 2172–2179, Mar. 2007
work page 2007
-
[53]
H. Khalil, Nonlinear Systems. Upper Saddle River, NJ: Pearson, 2002
work page 2002
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.