Beyond Numerical Features: CNN-Driven Algorithm Selection via Contour Plots for Continuous Black-Box Optimization
Pith reviewed 2026-05-21 06:16 UTC · model grok-4.3
The pith
Contour plots of probed landscapes let a CNN pick the best black-box optimizer from a portfolio.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
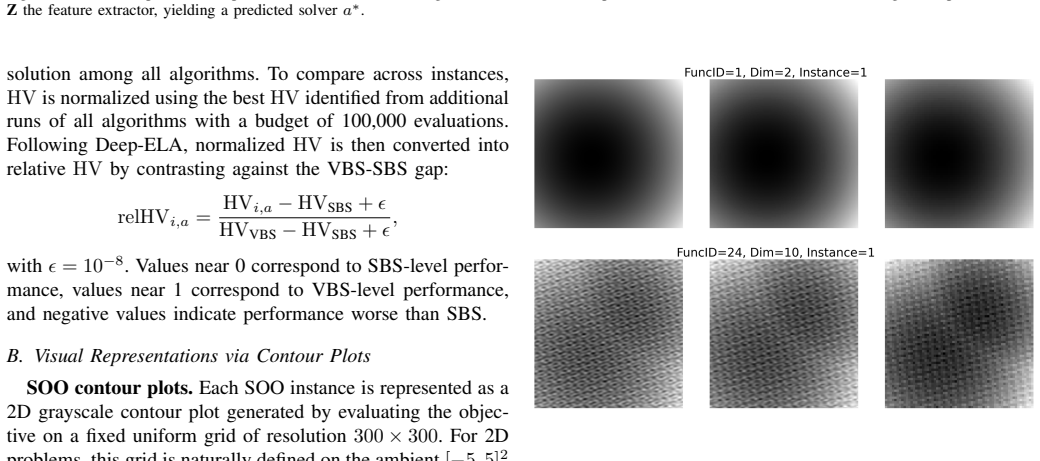
The paper establishes that contour-map visualizations of probed optimization landscapes, when fed to a CNN regressor, enable competitive per-instance algorithm selection. The regressor predicts per-solver performance from multiple instance-specific contour views, and selection proceeds by choosing the solver with the best predicted value. On the standard BBOB 2009 single-objective protocol these selectors significantly outperform the single best solver and remain competitive with feature-based baselines; a follow-up bi-objective test under a DeepELA-style protocol shows similar competitiveness when windowed contour views are used.
What carries the argument
A CNN regressor that ingests stacked or aggregated contour-map visualizations of probed landscapes to predict per-solver performance values.
If this is right
- Algorithm selection can be performed directly from visual probes of the landscape without computing any handcrafted numerical features.
- Portfolio performance improves over the single best solver because the selector adapts to instance-specific visual patterns.
- The same image-based pipeline remains competitive when extended from single-objective to bi-objective problems using windowed views.
- Selection decisions become independent of the particular set of Exploratory Landscape Analysis features chosen in advance.
Where Pith is reading between the lines
- If contour plots prove sufficient, future selectors could operate in real time by generating a small number of quick probes and rendering them as images.
- The approach suggests that other vision models or even simpler image statistics might replace the CNN while preserving selection quality.
- Instance representations could be shared across different optimization domains once they are expressed as standardized contour images rather than domain-specific numerical descriptors.
Load-bearing premise
Contour-map images of the landscapes contain enough spatial information for the CNN to accurately predict which solver will perform best on each instance.
What would settle it
A controlled test showing that replacing the contour plots with random images of the same size and color distribution produces selectors no better than random choice or the single best solver.
Figures




read the original abstract
The present paper introduces a new representation-driven approach to per-instance algorithm selection, applied to black-box optimization, for automatically choosing the most promising solver from a fixed portfolio. Prior work in continuous optimization largely relies on numerical descriptors, including Exploratory Landscape Analysis features and learned embeddings such as Deep-ELA. This work studies a complementary representation: contour-map visualizations of probed landscapes. A CNN regressor takes multiple instance-specific contour views (stacked or encoded per view and aggregated) and predicts per-solver performance, enabling selection by the predicted best value. On the standard BBOB 2009 single-objective protocol, the resulting selectors significantly outperform the single best solver (SBS) and are competitive with feature-based baselines. A subsequent bi-objective evaluation under the DeepELA setting further indicates that the same image-based principle can be competitive when using windowed contour views. Overall, the results suggest that simple vision models can exploit spatial structure in probed landscapes for algorithm selection without handcrafted ELA features.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces a representation-driven approach to per-instance algorithm selection for continuous black-box optimization. It replaces numerical descriptors such as ELA features with contour-map visualizations of probed landscapes, which are fed (stacked or encoded and aggregated) into a CNN regressor to predict per-solver performance and select the best solver from a portfolio. On the BBOB 2009 single-objective protocol the resulting selectors are claimed to significantly outperform the single best solver and remain competitive with feature-based baselines; a follow-up bi-objective evaluation under the DeepELA setting is also reported.
Significance. If the empirical claims hold under scrutiny, the work demonstrates that standard vision models can exploit spatial structure in simple landscape visualizations for effective algorithm selection, offering a complementary route to handcrafted or learned numerical features and potentially reducing reliance on domain-specific feature engineering.
major comments (2)
- [§3] §3 (Landscape Visualization and CNN Input): the central claim that stacked/encoded contour views supply enough spatial information for the CNN to regress per-solver performance is load-bearing for the headline result of outperformance on BBOB 2009, yet the manuscript provides no quantification or ablation of information loss when 2-D slices or projections are used on instances up to 40 D; without this the competitiveness with numerical ELA baselines cannot be fully assessed.
- [§4] §4 (BBOB Experiments): the abstract and results section assert significant outperformance over SBS and competitiveness with baselines, but the text supplies no concrete numbers, error bars, statistical tests, or details on data splits and training protocol; these omissions prevent verification of the reported gains.
minor comments (2)
- [Abstract] Abstract: the statement 'significantly outperform' should be accompanied by a reference to the specific table or figure that reports the quantitative results.
- [§3] Notation: the description of how multiple contour views are 'stacked or encoded per view and aggregated' would benefit from an explicit diagram or pseudocode to clarify the input tensor construction.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address the major comments point by point below and have revised the paper accordingly to improve clarity and completeness.
read point-by-point responses
-
Referee: [§3] §3 (Landscape Visualization and CNN Input): the central claim that stacked/encoded contour views supply enough spatial information for the CNN to regress per-solver performance is load-bearing for the headline result of outperformance on BBOB 2009, yet the manuscript provides no quantification or ablation of information loss when 2-D slices or projections are used on instances up to 40 D; without this the competitiveness with numerical ELA baselines cannot be fully assessed.
Authors: We agree that an explicit quantification or ablation of information loss from 2D contour projections in dimensions up to 40D would strengthen the assessment of the approach relative to numerical ELA baselines. The original manuscript emphasizes empirical competitiveness on BBOB instances, but does not include a dedicated ablation on this aspect. We will add such an analysis in the revised version, for example by comparing CNN performance on contour inputs against variants that incorporate additional dimensionality-aware processing or by reporting performance degradation trends across dimensions. revision: yes
-
Referee: [§4] §4 (BBOB Experiments): the abstract and results section assert significant outperformance over SBS and competitiveness with baselines, but the text supplies no concrete numbers, error bars, statistical tests, or details on data splits and training protocol; these omissions prevent verification of the reported gains.
Authors: We acknowledge that the main text could more explicitly present the supporting numerical results, error bars, statistical tests, and protocol details to facilitate verification. The manuscript reports results via tables and figures that include performance metrics with variability indicators and uses statistical comparisons (such as Wilcoxon signed-rank tests) to substantiate claims of outperformance over the single best solver. To address the concern, we will expand the results section in the revision to include specific numerical values, explicit descriptions of the data splits (e.g., instance-wise cross-validation), training protocol, and direct references to the statistical outcomes. revision: yes
Circularity Check
No significant circularity; empirical pipeline is self-contained
full rationale
The paper presents an empirical machine-learning pipeline: contour-map visualizations of probed BBOB landscapes are fed to a CNN regressor that predicts per-solver performance, after which selection is performed by argmax over the predictions. All performance claims are obtained by training on one set of instances and evaluating on held-out BBOB 2009 single-objective and bi-objective test suites, with direct comparison to the single-best solver and to numerical ELA/Deep-ELA baselines. No derivation, uniqueness theorem, or fitted parameter is invoked that reduces by construction to the target quantity; the method does not rely on self-citations for its central premise and is externally falsifiable on the public benchmark.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Convolutional neural networks can learn meaningful spatial features from contour plot images of optimization landscapes.
- domain assumption The BBOB 2009 single-objective protocol provides a fair and representative testbed for comparing algorithm selectors.
Reference graph
Works this paper leans on
-
[1]
Bbob in- stance analysis: Landscape properties and algorithm performance across problem instances,
F. X. Long, D. Vermetten, B. van Stein, and A. V . Kononova, “Bbob in- stance analysis: Landscape properties and algorithm performance across problem instances,” inInternational Conference on the Applications of Evolutionary Computation (Part of EvoStar). Springer, 2023, pp. 380– 395
work page 2023
-
[2]
No free lunch theorems for optimization,
D. Wolpert and W. Macready, “No free lunch theorems for optimization,” IEEE Transactions on Evolutionary Computation, vol. 1, no. 1, pp. 67– 82, 1997
work page 1997
-
[3]
Automated algorithm selection: Survey and perspectives,
P. Kerschke, H. H. Hoos, F. Neumann, and H. Trautmann, “Automated algorithm selection: Survey and perspectives,”Evolutionary computa- tion, vol. 27, no. 1, pp. 3–45, 2019
work page 2019
-
[4]
R. P. Prager, M. V . Seiler, H. Trautmann, and P. Kerschke, “Auto- mated algorithm selection in single-objective continuous optimization: a comparative study of deep learning and landscape analysis methods,” inInternational Conference on Parallel Problem Solving from Nature (PPSN). Springer, 2022, pp. 3–17
work page 2022
-
[5]
P. Kerschke and H. Trautmann, “Automated algorithm selection on continuous black-box problems by combining exploratory landscape analysis and machine learning,”Evolutionary Computation, vol. 27, no. 1, pp. 99–127, 2019
work page 2019
-
[6]
M. V . Seiler, P. Kerschke, and H. Trautmann, “Deep-ela: Deep ex- ploratory landscape analysis with self-supervised pretrained transformers for single-and multi-objective continuous optimization problems,”Evo- lutionary Computation, pp. 1–27, 2025
work page 2025
-
[7]
Deep learn- ing for algorithm portfolios,
A. Loreggia, Y . Malitsky, H. Samulowitz, and V . Saraswat, “Deep learn- ing for algorithm portfolios,” inProceedings of the AAAI Conference on Artificial Intelligence, vol. 30, no. 1, 2016
work page 2016
-
[8]
Real-parameter black- box optimization benchmarking 2009: Noiseless functions definitions,
S. Finck, N. Hansen, R. Ros, and A. Auger, “Real-parameter black- box optimization benchmarking 2009: Noiseless functions definitions,” INRIA, Tech. Rep. RR-6829, 2009, updated version as of February 2019. [Online]. Available: https://inria.hal.science/inria-00362633v2/document
work page 2009
-
[9]
The complexity of constrained min-max optimization,
C. Daskalakis, S. Skoulakis, and M. Zampetakis, “The complexity of constrained min-max optimization,” inProceedings of the 53rd Annual ACM SIGACT Symposium on Theory of Computing, 2021, pp. 1466– 1478
work page 2021
-
[10]
Automated algorithm selection: from feature-based to feature-free approaches,
M. Alissa, K. Sim, and E. Hart, “Automated algorithm selection: from feature-based to feature-free approaches,”Journal of Heuristics, vol. 29, no. 1, pp. 1–38, 2023
work page 2023
-
[11]
Learned features vs. classical ela on affine bbob functions,
M. Seiler, U. ˇSkvorc, G. Cenikj, C. Doerr, and H. Trautmann, “Learned features vs. classical ela on affine bbob functions,” inInternational Conference on Parallel Problem Solving from Nature (PPSN). Springer, 2024, pp. 137–153
work page 2024
-
[12]
COCO: A platform for comparing continuous optimizers in a black- box setting,
N. Hansen, A. Auger, R. Ros, O. Mersmann, T. Tu ˇsar, and D. Brockhoff, “COCO: A platform for comparing continuous optimizers in a black- box setting,”Optimization Methods and Software, vol. 36, pp. 114–144, 2021
work page 2021
-
[13]
J. Rook, H. Trautmann, J. Bossek, and C. Grimme, “On the potential of automated algorithm configuration on multi-modal multi-objective optimization problems,” inProceedings of the Genetic and Evolutionary Computation Conference Companion, 2022, pp. 356–359
work page 2022
-
[14]
Comparison of multiobjective evolutionary algorithms: Empirical results,
E. Zitzler, K. Deb, and L. Thiele, “Comparison of multiobjective evolutionary algorithms: Empirical results,”Evolutionary computation, vol. 8, no. 2, pp. 173–195, 2000
work page 2000
-
[15]
Scalable test problems for evolutionary multiobjective optimization,
K. Deb, L. Thiele, M. Laumanns, and E. Zitzler, “Scalable test problems for evolutionary multiobjective optimization,” inEvolutionary multiob- jective optimization: theoretical advances and applications. Springer, 2005, pp. 105–145
work page 2005
-
[16]
A novel scalable test problem suite for multimodal multiobjective optimization,
C. Yue, B. Qu, K. Yu, J. Liang, and X. Li, “A novel scalable test problem suite for multimodal multiobjective optimization,”Swarm and Evolutionary Computation, vol. 48, pp. 62–71, 2019
work page 2019
-
[17]
D. Brockhoff, A. Auger, N. Hansen, and T. Tu ˇsar, “Using well- understood single-objective functions in multiobjective black-box op- timization test suites,”Evolutionary computation, vol. 30, no. 2, pp. 165–193, 2022
work page 2022
-
[18]
A fast and elitist multiobjective genetic algorithm: Nsga-ii,
K. Deb, A. Pratap, S. Agarwal, and T. Meyarivan, “A fast and elitist multiobjective genetic algorithm: Nsga-ii,”IEEE transactions on evolu- tionary computation, vol. 6, no. 2, pp. 182–197, 2002
work page 2002
-
[19]
Sms-emoa: Multiobjective selection based on dominated hypervolume,
N. Beume, B. Naujoks, and M. Emmerich, “Sms-emoa: Multiobjective selection based on dominated hypervolume,”European journal of oper- ational research, vol. 181, no. 3, pp. 1653–1669, 2007
work page 2007
-
[20]
Moea/d: A multiobjective evolutionary algorithm based on decomposition,
Q. Zhang and H. Li, “Moea/d: A multiobjective evolutionary algorithm based on decomposition,”IEEE Transactions on evolutionary computa- tion, vol. 11, no. 6, pp. 712–731, 2007
work page 2007
-
[21]
Omni-optimizer: A procedure for single and multi-objective optimization,
K. Deb and S. Tiwari, “Omni-optimizer: A procedure for single and multi-objective optimization,” inInternational conference on evolution- ary multi-criterion optimization. Springer, 2005, pp. 47–61
work page 2005
-
[22]
An r package implementing the multi-objective land- scape explorer (mole),
L. Sch ¨apermeier, “An r package implementing the multi-objective land- scape explorer (mole),” 2022
work page 2022
-
[23]
Multimodality in multi- objective optimization–more boon than bane?
C. Grimme, P. Kerschke, and H. Trautmann, “Multimodality in multi- objective optimization–more boon than bane?” inInternational Confer- ence on Evolutionary Multi-Criterion Optimization. Springer, 2019, pp. 126–138
work page 2019
-
[24]
Hypervolume indicator gradient ascent multi-objective optimization,
H. Wang, A. Deutz, T. B ¨ack, and M. Emmerich, “Hypervolume indicator gradient ascent multi-objective optimization,” inInternational confer- ence on evolutionary multi-criterion optimization. Springer, 2017, pp. 654–669
work page 2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.