UOTIP: Unbalanced Optimal Transport Map for Unpaired Inverse Problems
Pith reviewed 2026-05-21 05:17 UTC · model grok-4.3
The pith
Unbalanced optimal transport learns a unique map from noisy measurements to clean signals without paired examples by adding a quadratic cost that satisfies the twist condition.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
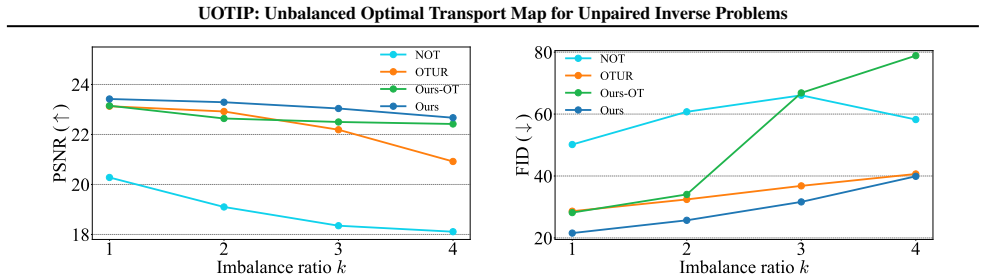
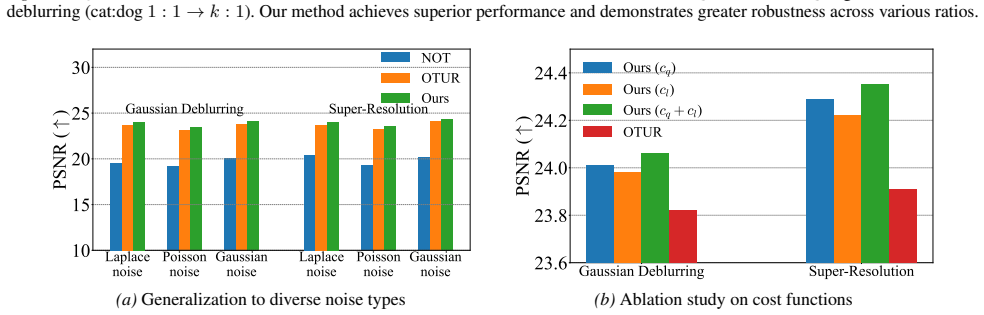
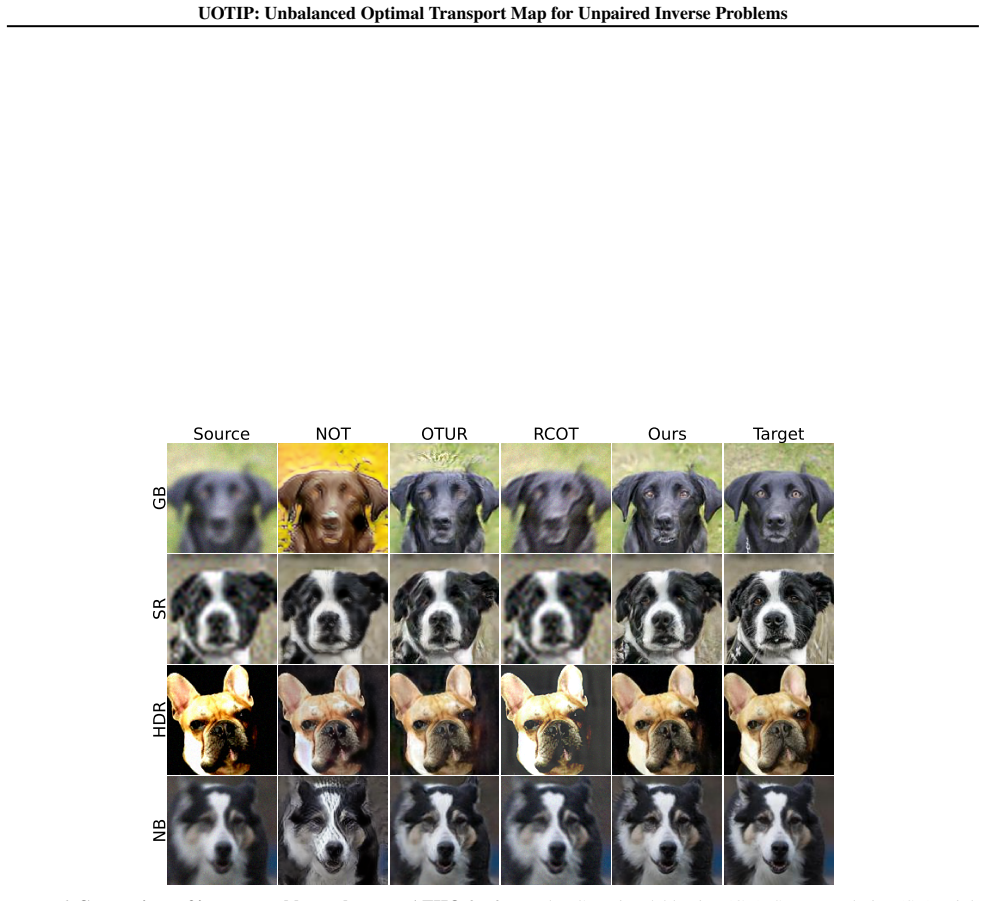
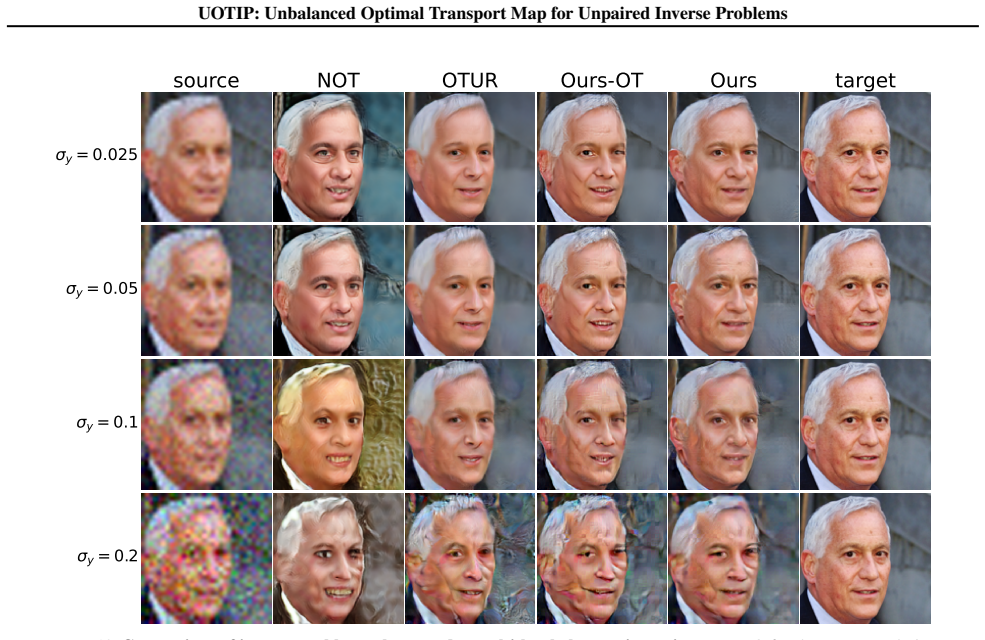
We formulate the reconstruction task as learning a UOT map from the noisy measurement distribution to the clean signal distribution using a likelihood-based cost. Incorporating a quadratic cost term ensures the existence and uniqueness of the transport map by satisfying the twist condition, even for ill-posed inverse problems. The unbalanced framework provides robustness to multi-level noise, adaptability to class imbalance, and generalizability across noise types. Experiments show state-of-the-art results on unpaired benchmarks for both linear and nonlinear inverse problems.
What carries the argument
The UOT map from noisy to clean distributions, driven by a likelihood cost plus a quadratic term that enforces the twist condition for uniqueness.
If this is right
- The same map can reconstruct images at multiple noise levels without retraining.
- The method remains effective when the number of noisy samples differs from the number of clean samples.
- It applies equally to linear operators such as blurring and to nonlinear forward models.
- The theoretical guarantee on map uniqueness holds for a range of ill-posed settings once the quadratic cost is included.
Where Pith is reading between the lines
- The distribution-level matching idea could be tested on non-image modalities such as audio or sensor time series where paired data are also scarce.
- Replacing the quadratic term with other costs that still meet the twist condition might yield maps with different smoothness properties.
- If the transport map generalizes across noise types, one could pre-train on synthetic noise and fine-tune on real measurements without new pairings.
Load-bearing premise
The overall distribution of noisy measurements can be mapped to the overall distribution of clean signals in a way that still yields accurate reconstructions for individual ill-posed instances.
What would settle it
Finding a concrete ill-posed inverse problem where the learned map produces visibly incorrect reconstructions or where multiple distinct maps satisfy the same objective would falsify the uniqueness claim.
Figures
















read the original abstract
We investigate unpaired image inverse problems, a challenging setting where only independent, non-paired sets of noisy measurements and clean target signals are available for training. We propose a novel inverse problem solver based on Unbalanced Optimal Transport, called Unbalanced Optimal Transport Map for Inverse Problems (UOTIP). Our method formulates the reconstruction task, predicting clean target signals from noisy measurements, as learning a UOT Map from noisy measurement distribution to clean signal distribution by incorporating a likelihood-based cost function. By relaxing the exact marginal constraint, the UOT framework provides key advantages to our model: robustness to multi-level observation noise, adaptability to class imbalance between noisy and clean datasets, and generalizability to diverse noise-type scenarios. Furthermore, we theoretically demonstrate that incorporating a quadratic cost term ensures the existence and uniqueness of the transport map by satisfying the twist condition, even for ill-posed inverse problems. Our experiments demonstrate that UOTIP achieves state-of-the-art performance on unpaired image inverse problem benchmarks, across linear and nonlinear inverse problems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes UOTIP, a method for unpaired image inverse problems that formulates reconstruction as learning an unbalanced optimal transport map from the distribution of noisy measurements to clean signals. It incorporates a likelihood-based cost augmented by a quadratic term, claims that this guarantees existence and uniqueness of the map by satisfying the twist condition even for ill-posed problems, and reports state-of-the-art empirical performance on benchmarks for linear and nonlinear inverse problems.
Significance. If the central theoretical claim holds, the work offers a principled way to handle unpaired data in inverse problems with built-in robustness to noise levels and class imbalance via the unbalanced relaxation. This could be impactful for applications where paired training data is unavailable, extending OT techniques beyond balanced settings.
major comments (1)
- [Theoretical Analysis] Theoretical section (proof of twist condition): The argument that adding the quadratic term to the likelihood cost ensures the twist condition (injectivity of y ↦ ∇_x c(x,y)) does not explicitly treat the case of a forward operator A with nontrivial kernel. When A has a null space, the likelihood gradient is invariant along ker(A) directions; without an explicit domination argument or calculation of the mixed Hessian showing the quadratic term renders it nondegenerate for all x in the support, the uniqueness guarantee for ill-posed inverses is not yet established.
minor comments (2)
- [Abstract and Experiments] The abstract and experimental section should specify the exact forward operators, noise models, and datasets used for the linear and nonlinear benchmarks to facilitate direct comparison.
- [Method] Notation for the cost function c(x,y) and the weighting between likelihood and quadratic terms should be introduced earlier and used consistently throughout the theoretical development.
Simulated Author's Rebuttal
We thank the referee for the thoughtful and constructive review. The feedback on the theoretical analysis is particularly helpful, and we address the major comment in detail below. We believe the suggested clarification will strengthen the manuscript.
read point-by-point responses
-
Referee: [Theoretical Analysis] Theoretical section (proof of twist condition): The argument that adding the quadratic term to the likelihood cost ensures the twist condition (injectivity of y ↦ ∇_x c(x,y)) does not explicitly treat the case of a forward operator A with nontrivial kernel. When A has a null space, the likelihood gradient is invariant along ker(A) directions; without an explicit domination argument or calculation of the mixed Hessian showing the quadratic term renders it nondegenerate for all x in the support, the uniqueness guarantee for ill-posed inverses is not yet established.
Authors: We agree with the referee that the current write-up of the twist-condition argument would benefit from an explicit treatment of the nontrivial-kernel case. While the quadratic term is designed to ensure non-degeneracy, the manuscript does not presently supply a detailed domination argument or mixed-Hessian calculation that covers directions in ker(A). In the revised version we will add a short lemma that computes the relevant second derivatives of the composite cost and shows that the quadratic component strictly dominates the (possibly degenerate) likelihood term along the kernel, thereby establishing injectivity of y ↦ ∇_x c(x,y) for all x in the support. This addition will make the uniqueness claim fully rigorous for ill-posed operators. revision: yes
Circularity Check
No significant circularity; central theory is an independent proof claim
full rationale
The derivation introduces UOTIP as a UOT map from noisy measurements to clean signals using a composite cost (likelihood-based plus quadratic term). The key theoretical step asserts that the quadratic term guarantees the twist condition for existence/uniqueness even under ill-posed operators. This is presented as a demonstration/proof rather than a definitional reduction, fitted-parameter renaming, or load-bearing self-citation. No equations in the provided text equate the claimed result to its own inputs by construction, and the method's advantages (robustness to noise imbalance) are argued separately from the twist-condition claim. The result is therefore self-contained against external OT theory.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Incorporating a quadratic cost term satisfies the twist condition for the transport map even in ill-posed inverse problems.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
incorporating a quadratic cost term ensures the existence and uniqueness of the transport map by satisfying the twist condition... c(y,x)=τ(cl(y,x)+cq(y,x)) with cl=||A(x)−y||²₂ and cq=||y−x||²₂
-
IndisputableMonolith/Foundation/AlphaCoordinateFixation.leanJ_uniquely_calibrated_via_higher_derivative unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Proposition 3.1... if A is L-Lipschitz... cl(y,x)+λ cq(y,x) satisfies the twist condition when λ>L
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Proceedings of the IEEE conference on computer vision and pattern recognition , pages=
Photo-realistic single image super-resolution using a generative adversarial network , author=. Proceedings of the IEEE conference on computer vision and pattern recognition , pages=
-
[2]
European conference on computer vision , pages=
Colorful image colorization , author=. European conference on computer vision , pages=. 2016 , organization=
work page 2016
-
[3]
Multiscale modeling & simulation , volume=
A review of image denoising algorithms, with a new one , author=. Multiscale modeling & simulation , volume=. 2005 , publisher=
work page 2005
-
[4]
Image deblurring with blurred/noisy image pairs , author=. Proceedings of the 34th ACM SIGGRAPH Conference on Computer Graphics, 34th Annual Meeting of the Association for Computing Machinery's Special Interest Group on Graphics; San Diego, CA; United States , year=
-
[5]
Proceedings of the 27th annual conference on Computer graphics and interactive techniques , pages=
Image inpainting , author=. Proceedings of the 27th annual conference on Computer graphics and interactive techniques , pages=
-
[6]
IEEE signal processing magazine , volume=
An introduction to compressive sampling , author=. IEEE signal processing magazine , volume=. 2008 , publisher=
work page 2008
-
[7]
A statistical perspective on ill-posed inverse problems , author=. Statistical science , pages=. 1986 , publisher=
work page 1986
-
[8]
2008 42nd Asilomar Conference on Signals, Systems and Computers , pages=
Compressed sensing and robust recovery of low rank matrices , author=. 2008 42nd Asilomar Conference on Signals, Systems and Computers , pages=. 2008 , organization=
work page 2008
-
[9]
IEEE Transactions on information theory , volume=
Robust uncertainty principles: Exact signal reconstruction from highly incomplete frequency information , author=. IEEE Transactions on information theory , volume=. 2006 , publisher=
work page 2006
-
[10]
Proceedings of the IEEE conference on computer vision and pattern recognition , pages=
Deep image prior , author=. Proceedings of the IEEE conference on computer vision and pattern recognition , pages=
-
[11]
On the stability of inverse problems , author=. Dokl. Akad. Nauk SSSR , volume=
-
[12]
IEEE Transactions on Signal Processing , volume=
Sparse reconstruction by separable approximation , author=. IEEE Transactions on Signal Processing , volume=. 2009 , publisher=
work page 2009
-
[13]
Proceedings of the IEEE , volume=
Computational methods for sparse solution of linear inverse problems , author=. Proceedings of the IEEE , volume=. 2010 , publisher=
work page 2010
-
[14]
Physica D: nonlinear phenomena , volume=
Nonlinear total variation based noise removal algorithms , author=. Physica D: nonlinear phenomena , volume=. 1992 , publisher=
work page 1992
-
[15]
SIAM Journal on Imaging Sciences , volume=
A new alternating minimization algorithm for total variation image reconstruction , author=. SIAM Journal on Imaging Sciences , volume=. 2008 , publisher=
work page 2008
-
[16]
An overview of full-waveform inversion in exploration geophysics , author=. Geophysics , volume=. 2009 , publisher=
work page 2009
-
[17]
Conference on inverse scattering--Theory and application , volume=
As a sequence of before stack migrations , author=. Conference on inverse scattering--Theory and application , volume=
-
[18]
Journal of Physics: Conference Series , volume=
Inverse problems in atmospheric science and their application , author=. Journal of Physics: Conference Series , volume=. 2005 , organization=
work page 2005
- [19]
-
[20]
arXiv preprint arXiv:2402.09821 , year=
Diffusion models for audio restoration , author=. arXiv preprint arXiv:2402.09821 , year=
-
[21]
Solving Audio Inverse Problems with a Diffusion Model , year=
Moliner, Eloi and Lehtinen, Jaakko and Välimäki, Vesa , booktitle=. Solving Audio Inverse Problems with a Diffusion Model , year=
-
[22]
Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
Solving 3d inverse problems using pre-trained 2d diffusion models , author=. Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
-
[23]
Monge, Gaspard , journal=. M
- [24]
- [25]
-
[26]
Optimal transport for applied mathematicians , author=. 2015 , publisher=
work page 2015
-
[27]
Advances in Neural Information Processing Systems , volume=
Robust optimal transport with applications in generative modeling and domain adaptation , author=. Advances in Neural Information Processing Systems , volume=
-
[28]
arXiv preprint arXiv:2211.08775 , year=
Unbalanced Optimal Transport, from theory to numerics , author=. arXiv preprint arXiv:2211.08775 , year=
-
[29]
The Twelfth International Conference on Learning Representations , year=
Unbalancedness in Neural Monge Maps Improves Unpaired Domain Translation , author=. The Twelfth International Conference on Learning Representations , year=
-
[30]
Journal of Functional Analysis , volume=
Unbalanced optimal transport: Dynamic and Kantorovich formulations , author=. Journal of Functional Analysis , volume=. 2018 , publisher=
work page 2018
-
[31]
Inventiones mathematicae , volume=
Optimal entropy-transport problems and a new Hellinger--Kantorovich distance between positive measures , author=. Inventiones mathematicae , volume=. 2018 , publisher=
work page 2018
-
[32]
Semi-Dual Unbalanced Quadratic Optimal Transport: fast statistical rates and convergent algorithm. , author =. Proceedings of the 40th International Conference on Machine Learning , pages =. 2023 , volume =
work page 2023
-
[33]
International Conference on Learning Representations , year=
Generative Modeling with Optimal Transport Maps , author=. International Conference on Learning Representations , year=
-
[34]
Transactions on Machine Learning Research , issn=
Neural Monge Map estimation and its applications , author=. Transactions on Machine Learning Research , issn=. 2023 , note=
work page 2023
-
[35]
Thirty-seventh Conference on Neural Information Processing Systems , year=
Generative Modeling through the Semi-dual Formulation of Unbalanced Optimal Transport , author=. Thirty-seventh Conference on Neural Information Processing Systems , year=
-
[36]
The Eleventh International Conference on Learning Representations , year=
Neural Optimal Transport , author=. The Eleventh International Conference on Learning Representations , year=
-
[37]
Forty-second International Conference on Machine Learning , year=
Unpaired Point Cloud Completion via Unbalanced Optimal Transport , author=. Forty-second International Conference on Machine Learning , year=
-
[38]
The Twelfth International Conference on Learning Representations , year=
Analyzing and Improving Optimal-Transport-based Adversarial Networks , author=. The Twelfth International Conference on Learning Representations , year=
- [39]
-
[40]
International Conference on Machine Learning , pages=
Optimal transport mapping via input convex neural networks , author=. International Conference on Machine Learning , pages=. 2020 , organization=
work page 2020
-
[41]
International Conference on Learning Representations , year=
Wasserstein-2 Generative Networks , author=. International Conference on Learning Representations , year=
-
[42]
The Thirteenth International Conference on Learning Representations , year=
Improving Neural Optimal Transport via Displacement Interpolation , author=. The Thirteenth International Conference on Learning Representations , year=
-
[43]
The Thirteenth International Conference on Learning Representations , year=
Robust Barycenter Estimation using Semi-Unbalanced Neural Optimal Transport , author=. The Thirteenth International Conference on Learning Representations , year=
-
[44]
Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
A style-based generator architecture for generative adversarial networks , author=. Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
-
[45]
Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
Stargan v2: Diverse image synthesis for multiple domains , author=. Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
-
[46]
Advances in neural information processing systems , volume=
Gans trained by a two time-scale update rule converge to a local nash equilibrium , author=. Advances in neural information processing systems , volume=
-
[47]
Proceedings of the IEEE conference on computer vision and pattern recognition , pages=
The unreasonable effectiveness of deep features as a perceptual metric , author=. Proceedings of the IEEE conference on computer vision and pattern recognition , pages=
-
[48]
Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
Explore image deblurring via encoded blur kernel space , author=. Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
-
[49]
Diffusion Posterior Sampling for General Noisy Inverse Problems
Diffusion posterior sampling for general noisy inverse problems , author=. arXiv preprint arXiv:2209.14687 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[50]
Advances in neural information processing systems , volume=
Denoising diffusion restoration models , author=. Advances in neural information processing systems , volume=
-
[51]
Pseudoinverse-Guided Diffusion Models for Inverse Problems , author=. ICLR , year=
-
[52]
Israel Journal of Mathematics , volume=
Optimal transportation on non-compact manifolds , author=. Israel Journal of Mathematics , volume=. 2010 , publisher=
work page 2010
-
[53]
IEEE Transactions on Pattern Analysis and Machine Intelligence , volume=
Untrained neural network priors for inverse imaging problems: A survey , author=. IEEE Transactions on Pattern Analysis and Machine Intelligence , volume=. 2022 , publisher=
work page 2022
-
[54]
Encyclopedia of applied and computational mathematics , pages=
Regularization of inverse problems , author=. Encyclopedia of applied and computational mathematics , pages=. 2015 , publisher=
work page 2015
- [55]
-
[56]
IEEE transactions on image processing , volume=
Beyond a gaussian denoiser: Residual learning of deep cnn for image denoising , author=. IEEE transactions on image processing , volume=. 2017 , publisher=
work page 2017
-
[57]
European conference on computer vision , pages=
Learning a deep convolutional network for image super-resolution , author=. European conference on computer vision , pages=. 2014 , organization=
work page 2014
-
[58]
Proceedings of the IEEE conference on computer vision and pattern recognition , pages=
Deep multi-scale convolutional neural network for dynamic scene deblurring , author=. Proceedings of the IEEE conference on computer vision and pattern recognition , pages=
-
[59]
International conference on machine learning , pages=
Do imagenet classifiers generalize to imagenet? , author=. International conference on machine learning , pages=. 2019 , organization=
work page 2019
-
[60]
International conference on machine learning , pages=
Compressed sensing using generative models , author=. International conference on machine learning , pages=. 2017 , organization=
work page 2017
-
[61]
Solving bayesian inverse 51 problems via variational autoencoders
Solving Bayesian inverse problems via variational autoencoders , author=. arXiv preprint arXiv:1912.04212 , year=
-
[62]
Solving inverse problems in med- ical imaging with score-based generative models
Solving inverse problems in medical imaging with score-based generative models , author=. arXiv preprint arXiv:2111.08005 , year=
-
[63]
Proceedings of the Computer Vision and Pattern Recognition Conference , pages=
Improving diffusion inverse problem solving with decoupled noise annealing , author=. Proceedings of the Computer Vision and Pattern Recognition Conference , pages=
-
[64]
A Survey on Diffusion Models for Inverse Problems
A survey on diffusion models for inverse problems , author=. arXiv preprint arXiv:2410.00083 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[65]
IEEE Transactions on Pattern Analysis and Machine Intelligence , volume=
Optimal transport for unsupervised denoising learning , author=. IEEE Transactions on Pattern Analysis and Machine Intelligence , volume=. 2022 , publisher=
work page 2022
-
[66]
Residual-Conditioned Optimal Transport: Towards Structure-Preserving Unpaired and Paired Image Restoration , author =. 2024 , volume =
work page 2024
-
[67]
Journal of Functional Analysis , pages=
Regularity theory and geometry of unbalanced optimal transport , author=. Journal of Functional Analysis , pages=. 2025 , publisher=
work page 2025
-
[68]
arXiv preprint arXiv:2502.04583 , year=
Overcoming Spurious Solutions in Semi-Dual Neural Optimal Transport: A Smoothing Approach for Learning the Optimal Transport Plan , author=. arXiv preprint arXiv:2502.04583 , year=
-
[69]
arXiv preprint arXiv:2410.02628 , year=
Inverse Entropic Optimal Transport Solves Semi-supervised Learning via Data Likelihood Maximization , author=. arXiv preprint arXiv:2410.02628 , year=
-
[70]
Advances in neural information processing systems , volume=
Adversarial regularizers in inverse problems , author=. Advances in neural information processing systems , volume=
-
[71]
IEEE Transactions on Computational Imaging , volume=
A neural-network-based convex regularizer for inverse problems , author=. IEEE Transactions on Computational Imaging , volume=. 2023 , publisher=
work page 2023
-
[72]
Proceedings of the 42nd International Conference on Machine Learning , pages =
Overcoming Spurious Solutions in Semi-Dual Neural Optimal Transport: A Smoothing Approach for Learning the Optimal Transport Plan , author =. Proceedings of the 42nd International Conference on Machine Learning , pages =. 2025 , volume =
work page 2025
-
[73]
arXiv preprint arXiv:2410.02656 , year=
Scalable simulation-free entropic unbalanced optimal transport , author=. arXiv preprint arXiv:2410.02656 , year=
-
[74]
Advances in Neural Information Processing Systems , volume=
Towards prospective medical image reconstruction via knowledge-informed dynamic optimal transport , author=. Advances in Neural Information Processing Systems , volume=
-
[75]
P. Langley , title =. Proceedings of the 17th International Conference on Machine Learning (ICML 2000) , address =. 2000 , pages =
work page 2000
-
[76]
T. M. Mitchell. The Need for Biases in Learning Generalizations. 1980
work page 1980
-
[77]
M. J. Kearns , title =
-
[78]
Machine Learning: An Artificial Intelligence Approach, Vol. I. 1983
work page 1983
-
[79]
R. O. Duda and P. E. Hart and D. G. Stork. Pattern Classification. 2000
work page 2000
-
[80]
Suppressed for Anonymity , author=
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.