Learning Transferable Predictability Representations
Pith reviewed 2026-06-29 08:26 UTC · model grok-4.3
The pith
A gauge-fixed ordinal network produces consistent predictability scores transferable across different dynamical systems.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
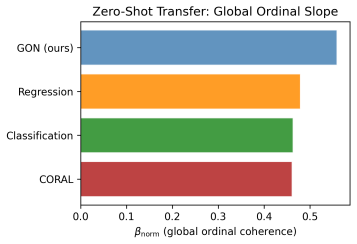
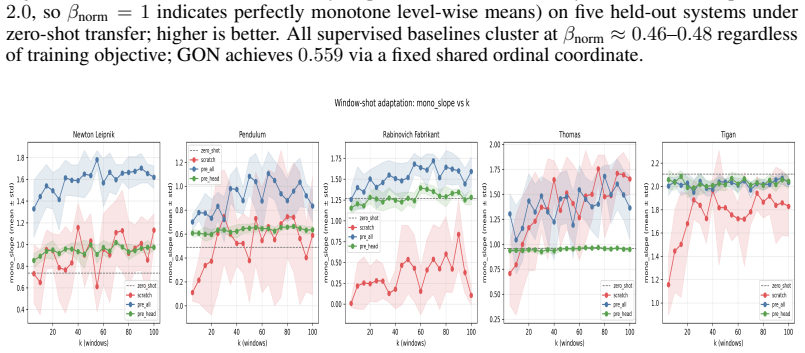
The Gauge-Fixed Ordinal Network (GON) assigns scalar predictability scores to trajectory windows by training a temporal convolutional model with an anchor-and-variance objective on 2-jet features, which pins level-wise score means to shared target coordinates and thereby eliminates gauge freedom in ordinal scoring. On five held-out dynamical systems, initializing from a pretrained GON checkpoint consistently outperforms training from scratch across all window budgets, with adaptation depth reflecting geometric proximity to the training family, and zero-shot scores retain ordinal structure at the stochastic boundary where surrogate procedures most strongly disrupt nonlinear geometry.
What carries the argument
The Gauge-Fixed Ordinal Network (GON), a temporal convolutional model trained with an anchor-and-variance objective that pins level-wise score means to shared target coordinates on 2-jet features.
If this is right
- Initializing from a pretrained GON checkpoint outperforms training from scratch on new dynamical systems across all window budgets.
- Zero-shot GON scores retain ordinal structure at the stochastic boundary where surrogate procedures disrupt nonlinear geometry.
- Pairwise discrimination and globally coherent ordinal scoring are distinct properties that both require a stable score coordinate for cross-system transfer.
- Adaptation depth on held-out systems reflects geometric proximity to the training family of dynamical systems.
Where Pith is reading between the lines
- The fixed score coordinate could support reusable predictability models applicable to multiple domains such as climate dynamics or engineered control systems without full retraining.
- Gauge-fixing via anchor objectives might generalize to other ordinal time-series tasks where numerical consistency across instances is needed.
- If 2-jet features prove robust under varied sampling, they could anchor geometry-based transfer in broader classes of dynamical modeling problems.
Load-bearing premise
That 2-jet features expose local trajectory geometry preserved by smooth flows and disrupted by stochastic surrogate procedures in a manner that allows the anchor-and-variance objective to produce a stable score coordinate usable for cross-system transfer.
What would settle it
If a GON model trained from scratch on a new dynamical system matches or exceeds the performance of a pretrained checkpoint initialization on multiple held-out systems and across all window budgets, the claimed transfer benefit would not hold.
Figures
read the original abstract
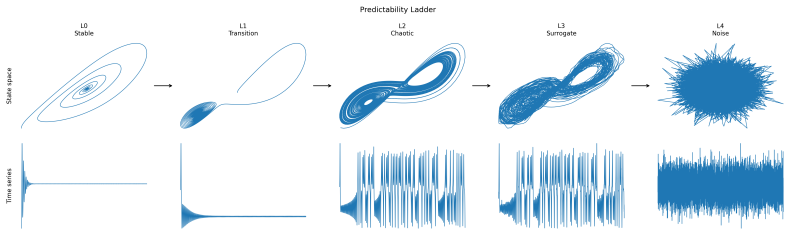
We study the problem of assigning a scalar score to a short trajectory window that reflects its position on an ordered continuum of predictability regimes, spanning structured deterministic dynamics to unstructured stochastic noise. Existing methods address deterministic-versus-stochastic discrimination within a single system and do not produce scores with a consistent numerical interpretation across systems. We formalize this as ordinal estimation over a five-level predictability ladder and identify a structural source of cross-system ambiguity: ranking supervision alone leaves the score coordinate unfixed up to a monotone reparameterization, which we term the gauge freedom of ordinal scoring. We propose the Gauge-Fixed Ordinal Network (GON), a temporal convolutional model trained with an anchor-and-variance objective that pins level-wise score means to shared target coordinates. GON operates on 2-jet features that expose local trajectory geometry, preserved by smooth flows and disrupted by stochastic surrogate procedures. On five held-out dynamical systems, initializing from a pretrained GON checkpoint consistently outperforms training from scratch across all window budgets, with adaptation depth reflecting geometric proximity to the training family. Zero-shot scores retain ordinal structure at the stochastic boundary, where surrogate procedures most strongly disrupt nonlinear geometry, and pretrained initialization consistently beats scratch across all window budgets. Pairwise discrimination and globally coherent ordinal scoring are distinct properties requiring a stable score coordinate for cross-system transfer, with direct implications for predictability assessment, model selection, and early-warning diagnostics across natural and engineered dynamical systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces the Gauge-Fixed Ordinal Network (GON), a temporal convolutional architecture operating on 2-jet features of short trajectory windows. It formalizes gauge freedom in ordinal predictability scoring and proposes an anchor-and-variance objective that pins the five level-wise score means to fixed shared target coordinates. The central empirical claim is that pretraining GON on a family of dynamical systems yields consistent gains over training from scratch when adapting to five held-out systems, with zero-shot scores preserving ordinal structure especially at the stochastic boundary.
Significance. If the transfer results hold under rigorous controls, the work supplies a concrete mechanism for producing numerically comparable predictability scores across systems whose local geometry is preserved by smooth flows. This would be directly relevant to model selection and early-warning diagnostics. The manuscript supplies no machine-checked proofs or parameter-free derivations, but the explicit separation of pairwise discrimination from globally coherent ordinal scoring is a useful conceptual clarification.
major comments (2)
- [Method / anchor-and-variance objective] The manuscript states that the five target coordinates are chosen rather than derived from data or first principles. Because these coordinates directly determine the numerical scale of the transferred scores, the claim that GON produces a 'stable score coordinate' usable for cross-system transfer rests on an unexamined modeling choice; an ablation showing that performance is insensitive to reasonable perturbations of these targets would be required to support the transfer claim.
- [Experiments / held-out systems] The abstract and described experiments report that pretrained initialization 'consistently outperforms' scratch training across window budgets, yet no numerical values, confidence intervals, or statistical tests are supplied in the provided text. Without these quantities it is impossible to assess whether the observed gains exceed what would be expected from the additional capacity or from the particular choice of held-out systems.
minor comments (2)
- [Preliminaries] Notation for the 2-jet features and the surrogate disruption procedure should be defined explicitly with equations rather than descriptive prose.
- [Experiments] The manuscript should clarify whether the five held-out systems were selected before or after observing the geometric-proximity pattern; post-hoc selection would weaken the transfer claim.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address each major comment below and describe the revisions we will make to strengthen the manuscript.
read point-by-point responses
-
Referee: [Method / anchor-and-variance objective] The manuscript states that the five target coordinates are chosen rather than derived from data or first principles. Because these coordinates directly determine the numerical scale of the transferred scores, the claim that GON produces a 'stable score coordinate' usable for cross-system transfer rests on an unexamined modeling choice; an ablation showing that performance is insensitive to reasonable perturbations of these targets would be required to support the transfer claim.
Authors: We agree that the target coordinates constitute a modeling choice whose robustness should be verified. In the revised manuscript we will add an ablation that perturbs the five targets by small uniform offsets drawn from [-0.2, 0.2] and report the resulting zero-shot and few-shot transfer metrics on the held-out systems. This will show that performance remains stable under reasonable perturbations and thereby support the claim of a usable stable score coordinate. revision: yes
-
Referee: [Experiments / held-out systems] The abstract and described experiments report that pretrained initialization 'consistently outperforms' scratch training across window budgets, yet no numerical values, confidence intervals, or statistical tests are supplied in the provided text. Without these quantities it is impossible to assess whether the observed gains exceed what would be expected from the additional capacity or from the particular choice of held-out systems.
Authors: We acknowledge that explicit quantitative support is required. The revised manuscript will include tables reporting the exact performance deltas (pretrained minus scratch), 95% confidence intervals obtained via bootstrap resampling, and the results of paired statistical tests (Wilcoxon signed-rank) for each held-out system and window budget. These additions will allow readers to evaluate whether the observed gains are statistically meaningful. revision: yes
Circularity Check
No significant circularity identified
full rationale
The paper identifies gauge freedom arising from ranking supervision alone and resolves it by introducing an explicit anchor-and-variance objective that pins level means to fixed target coordinates chosen as part of the method. This is a direct modeling decision rather than a derivation that reduces to its own inputs by construction. No self-citations, uniqueness theorems, or prior-work ansatzes are invoked as load-bearing steps. The 2-jet feature construction and surrogate disruption are stated as mechanisms enabling the objective, and the transfer claims rest on empirical evaluation across held-out systems rather than any fitted quantity renamed as a prediction. The derivation chain remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
free parameters (1)
- target coordinates for five predictability levels
axioms (1)
- domain assumption 2-jet features expose local trajectory geometry preserved by smooth flows and disrupted by stochastic surrogates
invented entities (1)
-
Gauge-Fixed Ordinal Network (GON)
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Miles Cranmer, Sam Greydanus, Stephan Hoyer, Peter Battaglia, David Spergel, and Shirley Ho. Lagrangian neural networks.arXiv preprint arXiv:2003.04630,
-
[2]
Panda: A pretrained forecast model for chaotic dynamics.arXiv preprint arXiv:2505.13755,
Jeffrey Lai, Anthony Bao, and William Gilpin. Panda: A pretrained forecast model for chaotic dynamics.arXiv preprint arXiv:2505.13755,
-
[3]
Fourier Neural Operator for Parametric Partial Differential Equations
ISSN 0375-9601. doi: 10.1016/ 0375-9601(81)90165-1. URLhttp://dx.doi.org/10.1016/0375-9601(81)90165-1. Zongyi Li, Nikola Kovachki, Kamyar Azizzadenesheli, Burigede Liu, Kaushik Bhattacharya, An- drew Stuart, and Anima Anandkumar. Fourier neural operator for parametric partial differential equations.arXiv preprint arXiv:2010.08895,
work page internal anchor Pith review Pith/arXiv arXiv doi:10.1016/0375-9601(81)90165-1 2010
-
[4]
doi: 10.1017/s0022112092003392
ISSN 1469-7645. doi: 10.1017/s0022112092003392. URLhttp://dx.doi.org/ 10.1017/s0022112092003392. Marten Scheffer, Jordi Bascompte, William A. Brock, Victor Brovkin, Stephen R. Carpenter, Vasilis Dakos, Hermann Höhne, Egbert H. van Nes, Max Rietkerk, and George Sugihara. Early-warning signals for critical transitions.Nature, 461(7260):53–59,
-
[5]
James Theiler, Stephen Eubank, André Longtin, Bryan Galdrikian, and J Doyne Farmer
doi: 10.1038/344734a0. James Theiler, Stephen Eubank, André Longtin, Bryan Galdrikian, and J Doyne Farmer. Testing for nonlinearity in time series: the method of surrogate data.Physica D: Nonlinear Phenomena, 58 (1-4):77–94,
-
[6]
Labyrinth chaos
René Thomas. Deterministic chaos seen in terms of feedback circuits: Analysis, synthesis, “Labyrinth chaos”.International Journal of Bifurcation and Chaos, 9(10):1889–1905,
1905
-
[7]
Gheorghe Tigan and Dumitru Opri¸ s
doi: 10.1142/S0218127499001383. Gheorghe Tigan and Dumitru Opri¸ s. Analysis of a 3d chaotic system.Chaos, Solitons & Fractals, 36(5):1315–1319, June
-
[8]
doi: 10.1016/j.chaos.2006.07.052
ISSN 0960-0779. doi: 10.1016/j.chaos.2006.07.052. URLhttp: //dx.doi.org/10.1016/j.chaos.2006.07.052. Alan Wolf, Jack B Swift, Harry L Swinney, and John A Vastano. Determining lyapunov exponents from a time series.Physica D: nonlinear phenomena, 16(3):285–317,
-
[9]
12 Appendix A Related Work Determinism versus stochasticity.Geometric diagnostics [Sugihara and May, 1990, Kaplan and Glass, 1992] and prediction-based tests study rejection of the stochastic null hypothesis within a single system. Permutation entropy [Bandt and Pompe, 2002] and sample entropy [Richman and Moorman, 2000] provide scalar complexity measures...
1990
-
[10]
D Data Generation and Labeling Details D.1 Numerical Integration Each system is simulated to produceN= 4096uniformly sampled time steps
The full model contains616,233trainable parameters. D Data Generation and Labeling Details D.1 Numerical Integration Each system is simulated to produceN= 4096uniformly sampled time steps. The timestep∆tis selected to resolve the dominant dynamical timescale of each system. We estimate a characteristic timescaleτfrom the mean inter-peak interval of the tr...
1993
-
[11]
Varied parameter:c. Regimecrange L0 (stable)[15.0,23.0) L1 (transition)[23.0,28.0) L2 (chaotic)[28.0,33.0) Chua [Chua et al., 1986] ˙x=α y−x−f(x) (11) ˙y=x−y+z(12) ˙z=−βy(13) where the piecewise-linear Chua diode is f(x) =m 1x+ 1 2(m0 −m
1986
-
[12]
Fixed parameters:β= 28.0,m 0 =−1.143,m 1 =−0.714
|x+ 1| − |x−1| . Fixed parameters:β= 28.0,m 0 =−1.143,m 1 =−0.714. Varied parameter:α. Regimeαrange L0 (stable)[6.0,10.0) L1 (transition)[10.0,13.0) L2 (chaotic)[13.0,16.0) Chua additionally uses double-scroll sampling (σ= 0.3about(±1.5,0,0)) and Gaussian pertur- bations (σ= 0.01) about the base point(0.7,0,0). Duffing [Duffing, 1918] The Duffing oscillat...
1918
-
[13]
Varied parameter:γ
+γy(49) ˙z=−2z(α+xy)(50) Fixed parameter:α= 0.1. Varied parameter:γ. Regimeγrange L0 (stable)[0.05,0.12) L1 (transition)[0.12,0.26) L2 (chaotic)[0.26,0.29) 19 Trajectories exceeding∥s∥ ∞ = 25were truncated to the bounded portion before divergence; trajec- tories with fewer than 300 retained points were discarded. Thomas [Thomas, 1999] ˙x= siny−bx(51) ˙y= ...
1999
-
[14]
kscratch pre_head pre_all 5 0.009±0.050 1.153±0.0581.256±0.143 10 0.218±0.278 1.203±0.0751.400±0.250 15 0.254±0.315 1.179±0.0161.345±0.211 20 0.244±0.209 1.281±0.0751.503±0.110 25 0.280±0.255 1.263±0.1301.402±0.255 30 0.277±0.206 1.226±0.1061.460±0.239 35 0.128±0.105 1.274±0.1261.550±0.175 40 0.180±0.237 1.247±0.0801.506±0.192 45 0.468±0.478 1.226±0.1131....
1920
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.