Target localization, identification and sensing using latent symmetries
Pith reviewed 2026-06-28 17:23 UTC · model grok-4.3
The pith
Scatterer arrays with latent symmetries sense intruder position and radius by measuring symmetry breaking.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
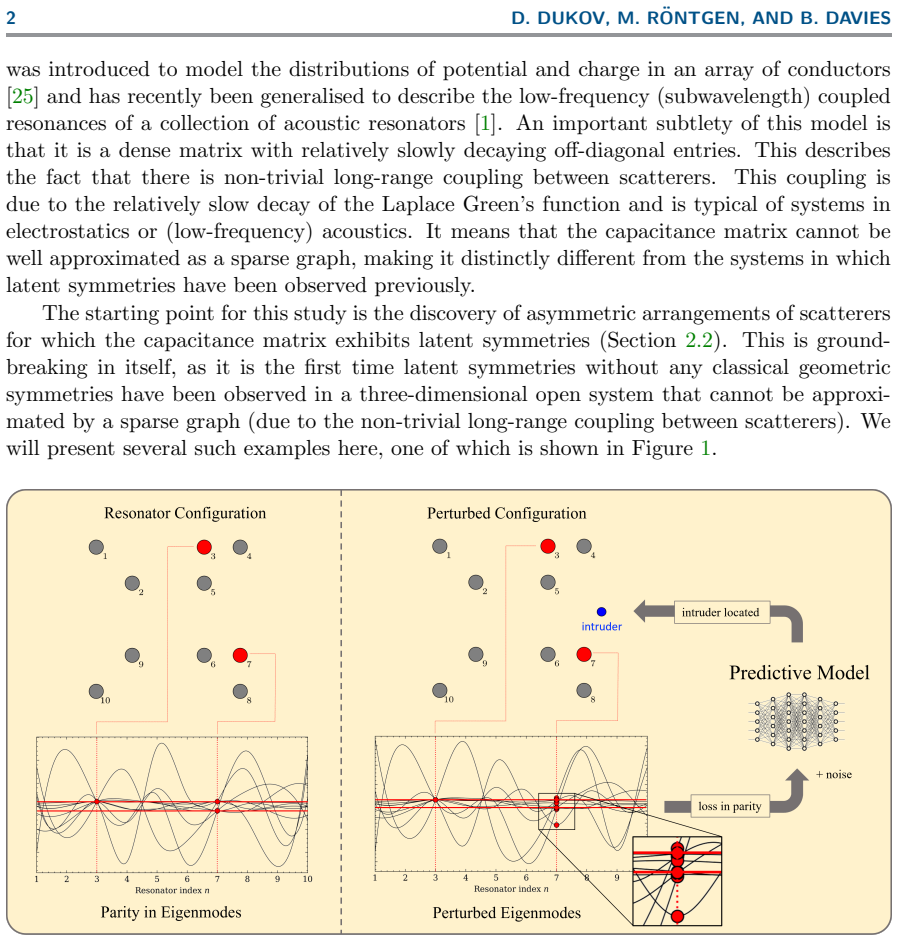
An array of scatterers designed with latent symmetries functions as a sensor. An intruder scatterer breaks these symmetries, and the extent of each break, extracted from the capacitance matrix, identifies the intruder's radius and localizes its position. This identification remains possible in three-dimensional open systems and improves under measurement noise when Bayesian inference or a multi-layer perceptron replaces dictionary matching.
What carries the argument
Latent symmetries in the capacitance matrix of a scatterer array, whose breaking by an intruder encodes radius and position.
If this is right
- The pattern of broken latent symmetries directly encodes the intruder's radius and position.
- A dictionary of precomputed symmetry signatures suffices for identification when noise is absent.
- Bayesian inference recovers radius and position more reliably than dictionary matching when measurement noise is present.
- A multi-layer perceptron trained on symmetry signatures also outperforms dictionary matching under noise.
- The method applies to three-dimensional open systems that cannot be approximated by sparse graphs.
Where Pith is reading between the lines
- The same symmetry-breaking analysis could be applied to other hybridization models beyond the capacitance matrix.
- Sensor arrays could be designed once with fixed latent symmetries and then reused for multiple intruder types by changing only the inference step.
- The approach suggests testing whether latent symmetries in other wave or diffusion systems yield comparable sensing capabilities.
Load-bearing premise
The capacitance matrix model correctly captures hybridization so that the pattern of symmetry breaking uniquely determines intruder radius and position even with added noise.
What would settle it
Compute or measure the capacitance matrix for a physical scatterer array containing an intruder of known radius at a known location, then test whether the observed symmetry-breaking degrees recover that radius and location within the claimed tolerance.
Figures

read the original abstract
We show that an array of scatterers which has been designed to have latent ("hidden") symmetries can be used as a sensor. We use the capacitance matrix as a canonical model for three-dimensional hybridisation and study how the introduction of an "intruder'' scatterer breaks the latent symmetries. By analysing the degree to which each symmetry is broken, we identify the radius of the intruder and localize its position. This can be achieved using a dictionary-based approach, however Bayesian inference or an artificial neural network (multi-layer perceptron) perform better in the presence of measurement noise. To our knowledge, this is the first time latent symmetries have been exploited successfully for sensing problems. It is also the first time latent symmetries have been observed in a three-dimensional open system that cannot be approximated by a sparse graph.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that arrays of scatterers engineered with latent symmetries can function as sensors. Using the capacitance matrix to model 3D hybridization, the introduction of an intruder scatterer breaks these symmetries; the degree of breaking encodes the intruder's radius and position. Identification is performed via dictionary matching, with Bayesian inference and multi-layer perceptrons shown to outperform the dictionary approach under measurement noise. The work asserts novelty as the first exploitation of latent symmetries for sensing and the first observation of such symmetries in a 3D open system not reducible to a sparse graph.
Significance. If the capacitance-matrix results transfer to physical hardware, the approach could enable new symmetry-based sensing modalities that leverage hidden symmetries rather than explicit geometric features. The comparative evaluation of dictionary, Bayesian, and neural-network recovery methods under noise provides a concrete demonstration of robustness. The absence of free parameters in the symmetry-breaking analysis and the explicit handling of an open 3D system are strengths that would strengthen the contribution if the model is validated.
major comments (1)
- [Modeling section / abstract statement on capacitance matrix] The central claim that symmetry-breaking signatures uniquely encode intruder radius and position (even under noise) rests on the capacitance matrix faithfully representing hybridization. No comparison is provided to full-wave Maxwell solvers that include radiation, retardation, or non-quasistatic effects; if these alter the observed breaking degrees beyond the noise levels used for the Bayesian/NN classifiers, the identifiability result does not transfer. This is load-bearing for both the sensing performance claims and the novelty assertion regarding 3D open systems.
minor comments (2)
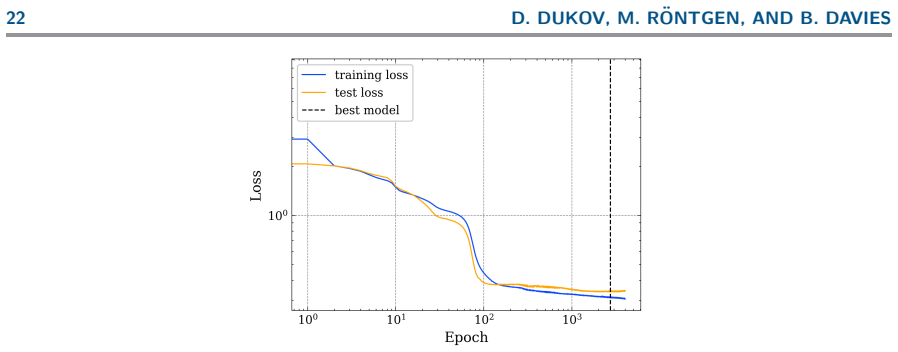
- [Abstract] The abstract states performance advantages for Bayesian inference and MLPs but supplies no quantitative metrics (e.g., localization error, radius classification accuracy, noise levels tested). These should be added with explicit tables or figures.
- [Introduction / methods] Notation for the latent symmetries and the breaking metric is introduced without a clear definition or reference to prior work on latent symmetries; a short dedicated subsection would improve readability.
Simulated Author's Rebuttal
We thank the referee for their careful reading of the manuscript and for highlighting an important modeling consideration. We address the major comment below.
read point-by-point responses
-
Referee: [Modeling section / abstract statement on capacitance matrix] The central claim that symmetry-breaking signatures uniquely encode intruder radius and position (even under noise) rests on the capacitance matrix faithfully representing hybridization. No comparison is provided to full-wave Maxwell solvers that include radiation, retardation, or non-quasistatic effects; if these alter the observed breaking degrees beyond the noise levels used for the Bayesian/NN classifiers, the identifiability result does not transfer. This is load-bearing for both the sensing performance claims and the novelty assertion regarding 3D open systems.
Authors: The capacitance matrix is a standard and widely accepted quasistatic model for electrostatic hybridization between conducting scatterers, as established in the literature on metamaterials and electrostatic sensing. Our results demonstrate that latent symmetries and their breaking are well-defined mathematical properties of this matrix, enabling unique encoding of intruder parameters (radius and position) within the model, including under the noise levels considered for the Bayesian and neural-network methods. The novelty claims refer specifically to the first exploitation of latent symmetries for sensing and their observation in a 3D open system that cannot be reduced to a sparse graph, both within this canonical modeling framework. We agree that direct numerical comparison to full-wave Maxwell solvers would be valuable to assess the impact of radiation, retardation, and non-quasistatic effects on the symmetry-breaking signatures. In the revised manuscript we will add a dedicated discussion subsection clarifying the scope and limitations of the quasistatic approximation (including the frequency and size regimes where it remains accurate) and identifying full-wave validation as an important direction for future experimental work. This revision will make the load-bearing assumptions explicit without changing the core identifiability results obtained inside the model. revision: partial
Circularity Check
No significant circularity; modeling and inference steps are independent
full rationale
The paper adopts the capacitance matrix as a canonical model for hybridization, introduces an intruder to break latent symmetries, and quantifies the breaking degrees to feed into standard identification methods (dictionary lookup, Bayesian inference, MLP). These steps do not reduce to self-definition, fitted parameters renamed as predictions, or load-bearing self-citations. The central claim rests on physical modeling of symmetry breaking rather than any equation or result that is constructed from the sensing output itself. No uniqueness theorems or ansatzes are smuggled via self-citation chains, and the approach is presented as an application of existing symmetry concepts to a new sensing task. This is the expected self-contained outcome for a modeling-plus-inference paper.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The capacitance matrix serves as a canonical model for three-dimensional hybridisation
Reference graph
Works this paper leans on
-
[1]
Ammari, B
H. Ammari, B. Davies, and E. O. Hiltunen , Functional analytic methods for discrete approximations of subwavelength resonator systems , Pure Appl. Anal., 6 (2024), pp. 873--939
2024
-
[2]
Ammari, B
H. Ammari, B. Davies, E. O. Hiltunen, H. Lee, and S. Yu , High-order exceptional points and enhanced sensing in subwavelength resonator arrays , Studies in Applied Mathematics, 146 (2021), pp. 440--462
2021
-
[3]
Ammari, B
H. Ammari, B. Davies, E. O. Hiltunen, and S. Yu , Topologically protected edge modes in one-dimensional chains of subwavelength resonators , J. Math. Pures Appl., 144 (2020), pp. 17--49
2020
-
[4]
T. Bai, A. L. Teckentrup, and K. C. Zygalakis , Gaussian processes for B ayesian inverse problems associated with linear partial differential equations , Stat. Comput., 34 (2024), p. 139
2024
-
[5]
P. A. Brand \ a o , Latent symmetry in a minimal non- Hermitian trimer , Mar. 2026, https://doi.org/10.48550/arXiv.2603.15768, https://arxiv.org/abs/2603.15768
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2603.15768 2026
-
[6]
Bunimovich, D
L. Bunimovich, D. Smith, and B. Webb , Finding hidden structures, hierarchies, and cores in networks via isospectral reduction. , Applied Mathematics & Nonlinear Sciences, 4 (2019)
2019
- [7]
-
[8]
A. Chan, G. Coutinho, W. Drazen, O. Eisenberg, C. Godsil, M. Kempton, G. Lippner, C. Tamon, and H. Zhan , Fundamentals of fractional revival in graphs , Linear Algebra Its Appl., 655 (2022), pp. 129--158, https://doi.org/10.1016/j.laa.2022.09.010
-
[9]
D. Chen, M. Davies, M. J. Ehrhardt, C.-B. Schönlieb, F. Sherry, and J. Tachella , Imaging with equivariant deep learning: From unrolled network design to fully unsupervised learning , IEEE Signal Processing Magazine, 40 (2023), pp. 134--147, https://doi.org/10.1109/MSP.2022.3205430
-
[10]
X. Chen, Z. Wei, L. Maokun, P. Rocca, et al. , A review of deep learning approaches for inverse scattering problems , Prog. Electromag. Res., 167 (2020), pp. 67--81
2020
-
[11]
X. Cui, R.-Y. Zhang, X. Wang, W. Wang, G. Ma, and C. T. Chan , Experimental Realization of Stable Exceptional Chains Protected by Non-Hermitian Latent Symmetries Unique to Mechanical Systems , Phys. Rev. Lett., 131 (2023), p. 237201, https://doi.org/10.1103/PhysRevLett.131.237201
-
[12]
Datchev and H
K. Datchev and H. Hezari , Inverse problems in spectral geometry , Inverse problems and applications: inside out. II, 60 (2011), pp. 455--485
2011
-
[13]
Davies and L
B. Davies and L. Herren , Robustness of subwavelength devices: a case study of cochlea-inspired rainbow sensors , Proc. R. Soc. A, 478 (2022), p. 20210765
2022
-
[14]
R. A. Diaz and W. J. Herrera , The positivity and other properties of the matrix of capacitance: Physical and mathematical implications , Journal of Electrostatics, 69 (2011), pp. 587--595
2011
-
[15]
L. Eek, M. R \"o ntgen, A. Moustaj, and C. Morais Smith , Higher-order topology protected by latent crystalline symmetries , SciPost Physics, 18 (2025), p. 061, https://doi.org/10.21468/SciPostPhys.18.2.061
-
[16]
Godsil and J
C. Godsil and J. Smith , Strongly cospectral vertices , Australasian Journal of Combinatorics, 88 (2024), pp. 1--21
2024
-
[17]
Q.-H. Guo, Y. Zhang, X.-H. Wan, and L.-Y. Zheng , Observation of chiral edge state pairs in an acoustic trimer waveguide , Appl. Phys. Lett., 126 (2025), p. 133102, https://doi.org/10.1063/5.0256334
-
[18]
W. D. Heiss , The physics of exceptional points , Jouranl of Physics A, 45 (2012), p. 444016
2012
-
[19]
J. Himmel, M. Ehrhardt, M. Heinrich, M. R \"o ntgen, A. Szameit, and T. A. W. Wolterink , Eigenmodes of Latent-Symmetric Quantum Photonic Networks , ACS Photonics, (2025), https://doi.org/10.1021/acsphotonics.5c01082
-
[20]
J. Himmel, M. Ehrhardt, M. Heinrich, S. Weidemann, T. A. W. Wolterink, M. R \"o ntgen, P. Schmelcher, and A. Szameit , State transfer in latent-symmetric networks , eLight, 6 (2026), p. 3, https://doi.org/10.1186/s43593-025-00114-9
-
[21]
S. N. Kempkes, P. Capiod, S. Ismaili, J. Mulkens, L. Eek, I. Swart, and C. Morais Smith , Compact localized boundary states in a quasi- 1D electronic diamond-necklace chain , Quantum Front, 2 (2023), p. 1, https://doi.org/10.1007/s44214-023-00026-0
-
[22]
M. Kempton, J. Sinkovic, D. Smith, and B. Webb , Characterizing cospectral vertices via isospectral reduction , Linear Algebra Its Appl., 594 (2020), pp. 226--248, https://doi.org/10.1016/j.laa.2020.02.020
-
[23]
D. P. Kingma and J. Ba , Adam: A method for stochastic optimization , in International Conference on Learning Representations (ICLR), 2015
2015
-
[24]
J.-R. Lin, S. Wang, H. Li, and Z.-W. Zuo , Topological Anderson insulators by latent symmetry , Phys. Rev. B, 113 (2026), p. 094201, https://doi.org/10.1103/6cf5-jsg3
-
[25]
J. C. Maxwell , A Treatise on Electricity and Magnetism , vol. 1, Clarendon Press, 1873
-
[26]
S. Nayak , Multivariable constrained nonlinear optimization , in Fundamentals of Optimization Techniques with Algorithms, S. Nayak, ed., Academic Press, 2020, pp. 135--170, https://doi.org/https://doi.org/10.1016/B978-0-12-821126-7.00005-X, https://www.sciencedirect.com/science/article/pii/B978012821126700005X
-
[27]
S. J. D. Prince , Understanding Deep Learning , MIT Press, 2023
2023
-
[28]
M. C. Rechtsman , Optical sensing gets exceptional , Nature, 548 (2017), pp. 161--162
2017
-
[29]
M. R \"o ntgen, X. Chen, W. Gao, M. Pyzh, P. Schmelcher, V. Pagneux, V. Achilleos, and A. Coutant , Topological states protected by hidden symmetry , Phys. Rev. B, 110 (2024), p. 035106, https://doi.org/10.1103/PhysRevB.110.035106
-
[30]
M. R \"o ntgen, C. V. Morfonios, P. Schmelcher, and V. Pagneux , Hidden symmetries in acoustic wave systems , Phys. Rev. Lett., 130 (2023), p. 077201, https://doi.org/10.1103/PhysRevLett.130.077201
-
[31]
R \"o ntgen, C
M. R \"o ntgen, C. V. Morfonios, P. Schmelcher, and V. Pagneux , Hidden symmetries in acoustic wave systems , Physical Review Letters, 130:077201 (2023)
2023
-
[32]
M. R \"o ntgen, M. Pyzh, C. V. Morfonios, N. E. Palaiodimopoulos, F. K. Diakonos, and P. Schmelcher , Latent symmetry induced degeneracies , Phys. Rev. Lett., 126 (2021), p. 180601, https://doi.org/10.1103/PhysRevLett.126.180601
-
[33]
M. R \"o ntgen, M. Pyzh, C. V. Morfonios, and P. Schmelcher , On symmetries of a matrix and its isospectral reduction , May 2021, https://doi.org/10.48550/arXiv.2105.12579, https://arxiv.org/abs/2105.12579
-
[34]
M. R \"o ntgen, O. Richoux, G. Theocharis, C. V. Morfonios, P. Schmelcher, P. del Hougne , and V. Achilleos , Equireflectionality and customized unbalanced coherent perfect absorption in asymmetric waveguide networks , Phys. Rev. Appl., 20 (2023), p. 044082, https://doi.org/10.1103/PhysRevApplied.20.044082
-
[35]
Smith and B
D. Smith and B. Webb , Hidden symmetries in real and theoretical networks , Physica A, 514 (2019), pp. 855--867
2019
-
[36]
J. Sol, M. R \"o ntgen, and P. del Hougne , Covert Scattering Control in Metamaterials with Non-Locally Encoded Hidden Symmetry , Advanced Materials, 36 (2024), p. 2303891, https://doi.org/10.1002/adma.202303891
-
[37]
C.-L. Sung, W. Wang, F. Cakoni, I. Harris, and Y. Hung , Functional-input G aussian processes with applications to inverse scattering problems , Stat. Sinica, 34 (2024), pp. 1883--1902
2024
-
[38]
Vollmer, S
F. Vollmer, S. Arnold, and D. Keng , Single virus detection from the reactive shift of a whispering-gallery mode , Proc. Natl. Acad. Sci. USA, 105 (2008), pp. 20701--20704
2008
-
[39]
L.-Y. Zheng, Y.-F. Li, J. Zhang, and Y. Huang , Robust topological edge states induced by latent mirror symmetry , Phys. Rev. B, 108 (2023), p. L220303, https://doi.org/10.1103/PhysRevB.108.L220303
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.