Binary Road Surface Classification Using Machine Learning on Production Vehicle Signals During Cruising
Pith reviewed 2026-06-28 15:07 UTC · model grok-4.3
The pith
Machine learning on production vehicle signals during cruising enables binary classification of road surfaces into grip and slip conditions.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
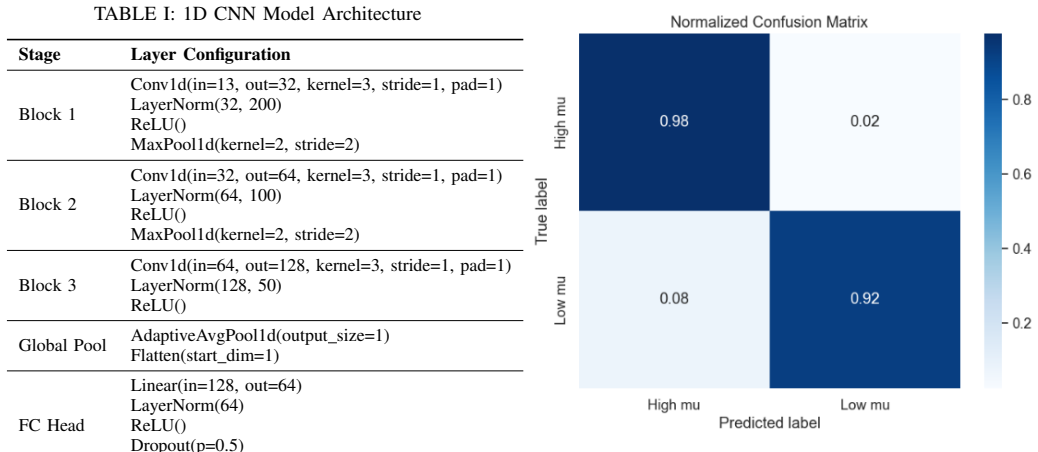
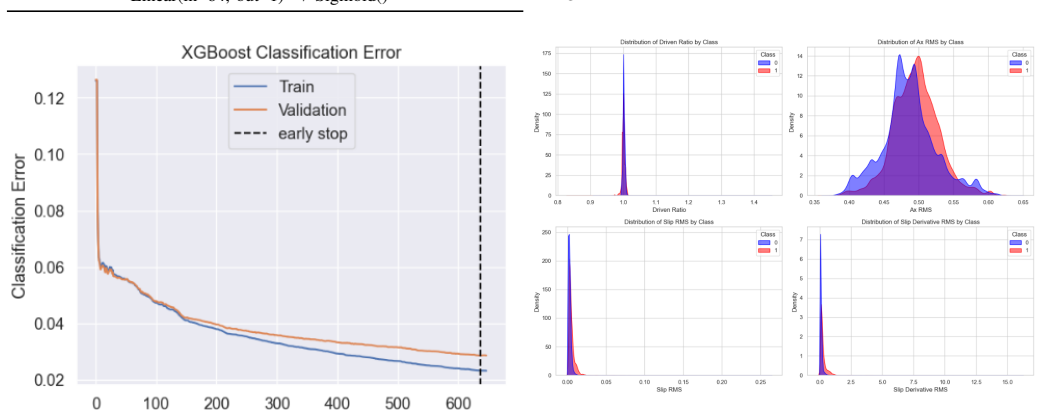
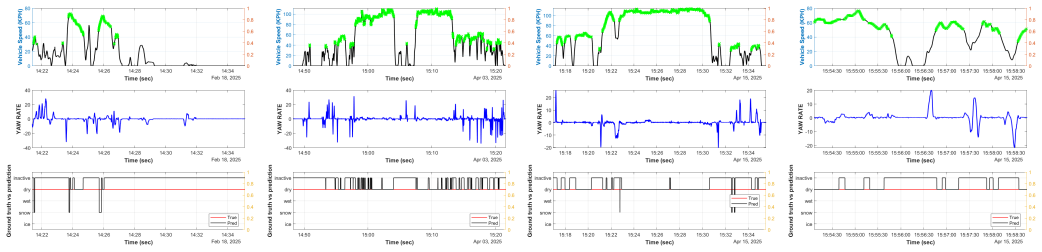
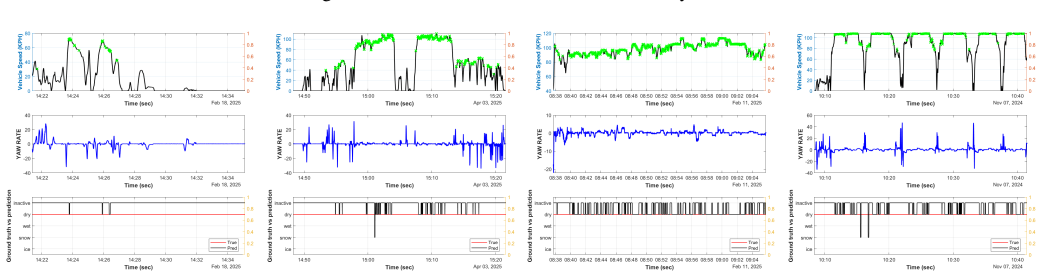
A sliding-window approach batches short segments of wheel speeds, wheel torques, longitudinal acceleration, steering angle, and yaw rate; these batches are passed to machine-learning modules that perform binary classification of the road into grip (dry or damp) versus slip (snow or ice) states. Validation on public-road data demonstrates that the data-driven models identify the surface correctly in cruising scenarios where dynamics-based recursive estimators cannot operate.
What carries the argument
Sliding-window batches of production vehicle signals processed by machine-learning modules to predict grip or slip road state.
If this is right
- Road-surface state estimation becomes feasible in low-slip cruising where slip-slope methods fail.
- Only production-grade sensors already present on vehicles are required.
- Binary grip-versus-slip output supplies a usable input for vehicle warning and intervention systems.
- The method operates on short buffered windows, enabling real-time deployment.
Where Pith is reading between the lines
- Integration with existing vehicle dynamics estimators could allow seamless switching between cruising and high-slip modes.
- Collecting larger labeled datasets from fleet vehicles might improve robustness across more surface types and weather conditions.
- The same signal windows could be tested for regression tasks that output a continuous grip-potential value rather than a binary label.
Load-bearing premise
The chosen vehicle signals during cruising contain distinguishable statistical patterns for grip versus slip road conditions and the road surface labels used for training are accurate and representative.
What would settle it
Apply the trained models to new public-road cruising segments whose surface conditions have been verified by independent measurement and observe whether classification accuracy falls below a level that supports practical use.
Figures





read the original abstract
Knowledge of real-time road slipperiness, or even better, a refined estimate of peak grip potential, is a critical input for vehicle warning and intervention control systems. Typically, friction is estimated through dynamics-based recursive estimators by calculating the slip slope; however, its efficacy is heavily constrained by the vehicle dynamic scenario. When the vehicle is cruising and there is little to no slip, these methods become ineffective due to the inability of present-day production-grade sensors, such as wheel speed sensors, and methods to either measure or accurately estimate micro slip, which is crucial for distinguishing different surfaces. To address this challenge, the correlation between vehicle signals and road surface condition during cruising needs to be uncovered using machine learning. In this paper, a feature-based framework and an end-to-end data-driven framework are used to correlate the statistics of vehicle dynamics behavior with the condition of the road surface and perform binary classification into grip, dry or damp, and slip, snow or ice, conditions. A sliding-window approach is adopted to batch a short buffered window of wheel speeds, wheel torques, longitudinal acceleration, steering angle, and yaw rate, which are fed into a machine learning module for predicting the road state. Validation results on public-road data show scenarios where the data-driven method identifies the road surface correctly even during cruising, showing promise for accurate data-driven friction-related state estimators in the field of tire and vehicle dynamics.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a machine learning approach for binary classification of road surfaces (grip vs. slip) using production vehicle signals during cruising, where traditional slip-based estimators fail. It describes feature-based and end-to-end frameworks that process sliding windows of signals including wheel speeds, torques, longitudinal acceleration, steering angle, and yaw rate. The central claim is that validation on public-road data demonstrates scenarios in which the method correctly identifies the road surface, indicating promise for data-driven friction estimation.
Significance. If the validation results can be substantiated with quantitative metrics, this work could contribute to improving real-time road condition awareness for vehicle safety systems in low-slip regimes. The modest framing of the claim as 'showing promise' rather than claiming high accuracy is appropriate and avoids overstatement. The use of readily available production signals is a practical strength.
major comments (1)
- [Abstract] Abstract (validation results paragraph): The claim that validation 'show[s] scenarios where the data-driven method identifies the road surface correctly' is presented without any performance metrics, baselines, error analysis, dataset size, number of test scenarios, or details on how ground-truth labels were obtained. This absence leaves even the modest central claim without verifiable support.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and for recognizing the practical value of using production signals. We address the single major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract (validation results paragraph): The claim that validation 'show[s] scenarios where the data-driven method identifies the road surface correctly' is presented without any performance metrics, baselines, error analysis, dataset size, number of test scenarios, or details on how ground-truth labels were obtained. This absence leaves even the modest central claim without verifiable support.
Authors: We agree that the abstract, in its current concise form, does not supply the quantitative details needed to substantiate even the modest claim. The full manuscript demonstrates correct classifications via specific public-road examples but does not report aggregate metrics such as accuracy or error rates. In the revised version we will expand the abstract to state the number of test scenarios, approximate dataset size (in terms of sliding windows), and a summary statistic of observed correct identifications, while retaining the modest 'showing promise' language. Ground-truth labels were assigned according to the known surface conditions of the selected public-road segments (dry/damp vs. snow/ice), verified by visual inspection at the time of recording. revision: yes
Circularity Check
No significant circularity; empirical ML validation on held-out data
full rationale
The paper presents a standard supervised binary classification pipeline (feature-based and end-to-end ML models) trained on labeled vehicle-signal windows to distinguish grip vs. slip road conditions. Validation consists of reporting correct identifications on public-road data, which is an external empirical test rather than a reduction of any claimed derivation to its own fitted parameters or self-citations. No equations, uniqueness theorems, ansatzes, or load-bearing self-citations appear in the provided text; the modest claim of 'showing promise' is directly supported by observable performance on separate data and does not reduce to a self-definitional mapping.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Vehicle dynamics signals during cruising contain distinguishable patterns for grip versus slip road conditions
Reference graph
Works this paper leans on
-
[1]
H. Du, L. Wang, and M. Cai, “Research on recognition of slippery road surface and collision warning system based on deep learning,”PLOS ONE, vol. 19, no. 11, p. e0310858, Nov. 2024. [Online]. Available: http://dx.doi.org/10.1371/journal.pone.0310858
-
[2]
L. Yang, Y . Yang, G. Wu, X. Zhao, S. Fang, X. Liao, R. Wang, and M. Zhang, “A systematic review of autonomous emergency braking system: Impact factor, technology, and performance evaluation,”Journal of Advanced Transportation, vol. 2022, p. 1–13, Apr. 2022. [Online]. Available: http://dx.doi.org/10.1155/2022/1188089
-
[3]
Adaptive emergency braking control with underestimation of friction coefficient,
J. Yi, L. Alvarez, and R. Horowitz, “Adaptive emergency braking control with underestimation of friction coefficient,”IEEE Transactions on Control Systems Technology, vol. 10, no. 3, p. 381–392, May 2002. [Online]. Available: http://dx.doi.org/10.1109/87.998027
-
[4]
Autonomous emergency braking considering road slope and friction coefficient,
H. Kim, K. Shin, I. Chang, and K. Huh, “Autonomous emergency braking considering road slope and friction coefficient,”International Journal of Automotive Technology, vol. 19, no. 6, p. 1013–1022, Dec
-
[5]
Available: http://dx.doi.org/10.1007/s12239-018-0098-9
[Online]. Available: http://dx.doi.org/10.1007/s12239-018-0098-9
-
[6]
Road friction virtual sensing: A review of estimation techniques with emphasis on low excitation approaches,
M. Acosta, S. Kanarachos, and M. Blundell, “Road friction virtual sensing: A review of estimation techniques with emphasis on low excitation approaches,”Applied Sciences, vol. 7, no. 12, p. 1230, Nov
-
[7]
Available: http://dx.doi.org/10.3390/app7121230
[Online]. Available: http://dx.doi.org/10.3390/app7121230
-
[8]
Slip-based tire-road friction estimation,
F. Gustafsson, “Slip-based tire-road friction estimation,”Automatica (Oxf.), vol. 33, no. 6, pp. 1087–1099, Jun. 1997
1997
-
[9]
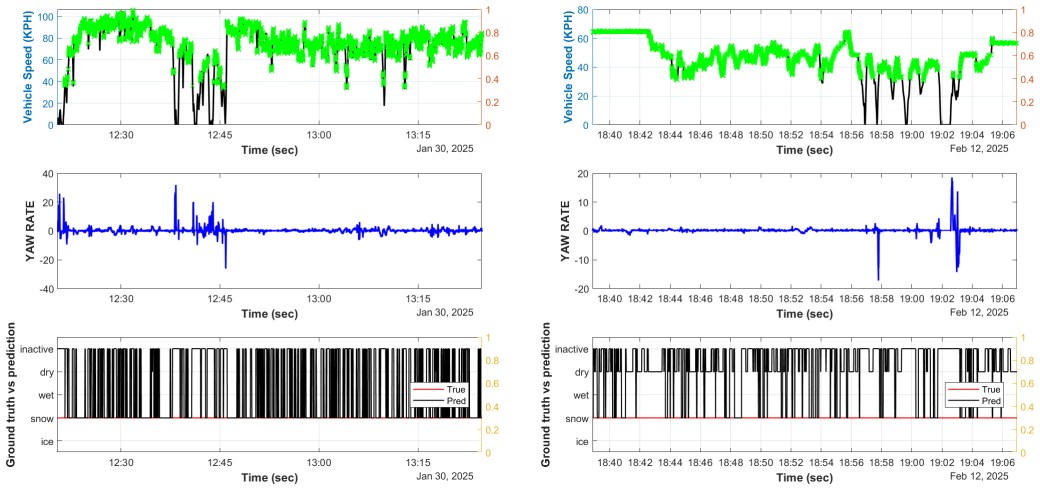
M. Choi, J. J. Oh, and S. B. Choi, “Linearized recursive least squares methods for real-time identification of tire–road friction coefficient,”IEEE Transactions on Vehicular Technology, vol. 62, no. 7, p. 2906–2918, Sep. 2013. [Online]. Available: http://dx.doi.org/10.1109/TVT.2013.2260190 Fig. 7: Performance of 1D CNN model on snow runs
-
[10]
J. Zhao, J. Zhang, and B. Zhu, “Development and verification of the tire/road friction estimation algorithm for antilock braking system,” Mathematical Problems in Engineering, vol. 2014, no. 1, Jan. 2014. [Online]. Available: http://dx.doi.org/10.1155/2014/786492
-
[11]
Tire-road friction coefficient estimation based on fusion of model- and data-based methods,
J. Tang, H. Dourra, and G. Zhu, “Tire-road friction coefficient estimation based on fusion of model- and data-based methods,”ASME Letters in Dynamic Systems and Control, vol. 3, no. 1, Jan. 2023. [Online]. Available: http://dx.doi.org/10.1115/1.4062283
-
[12]
Bayesian tire-friction learning by gaussian-process state-space models,
K. Berntorp, “Bayesian tire-friction learning by gaussian-process state-space models,” in2019 18th European Control Conference (ECC). IEEE, Jun. 2019, p. 231–236. [Online]. Available: http: //dx.doi.org/10.23919/ECC.2019.8796193
-
[13]
Model learning of the tire–road friction slip dependency under standard driving conditions,
V . Mussot, G. Merc `ere, T. Dairay, V . Arvis, and J. Vayssettes, “Model learning of the tire–road friction slip dependency under standard driving conditions,”Control Engineering Practice, vol. 121, p. 105048, Apr
-
[14]
Available: http://dx.doi.org/10.1016/j.conengprac.2021
[Online]. Available: http://dx.doi.org/10.1016/j.conengprac.2021. 105048
-
[15]
L. Chen, Z. Qin, Y . Bian, M. Hu, and X. Peng, “Data-driven tire-road friction estimation for electric-wheel vehicle with data category selection and uncertainty evaluation,”IEEE Transactions on Industrial Electronics, vol. 72, no. 3, p. 3048–3060, Mar. 2025. [Online]. Available: http://dx.doi.org/10.1109/TIE.2024.3440510
-
[16]
Tire friction modeling under wet road conditions,
X. Claeys, J. Yi, L. Alvarez, R. Horowitz, C. de Wit, and L. Richard, “Tire friction modeling under wet road conditions,” inProceedings of the 2001 American Control Conference. (Cat. No.01CH37148). IEEE, 2001, p. 1794–1799 vol.3. [Online]. Available: http://dx.doi.org/10.1109/ACC.2001.945994
-
[17]
Slippery road vehicle early warning system: Method augmentation,
C. Druta and A. Alden, “Slippery road vehicle early warning system: Method augmentation,” National Surface Transportation Safety Center for Excellence (NSTSCE), Virginia Tech Transportation Institute, Tech. Rep., 2023. [Online]. Available: https://vtechworks.lib.vt.edu/items/ e8010b0a-c7ba-4053-a14a-50ae8d5ae80b
2023
-
[18]
Wheel slip-based road surface slipperiness detection,
J. Jang, “Wheel slip-based road surface slipperiness detection,”Open Transp. J., vol. 14, no. 1, pp. 186–193, Sep. 2020
2020
-
[19]
VehSense: Slippery road detection using smartphones,
Y . Hou, A. Gupta, T. Guan, S. Hu, L. Su, and C. Qiao, “VehSense: Slippery road detection using smartphones,” 2017
2017
-
[20]
On-board road condition monitoring system using slip-based tire-road friction estimation and wheel speed signal analysis,
K. Li, J. A. Misener, and K. Hedrick, “On-board road condition monitoring system using slip-based tire-road friction estimation and wheel speed signal analysis,” inDynamic Systems and Control, Parts A and B. ASMEDC, Jan. 2006
2006
-
[21]
XGBoost: A scalable tree boosting system,
T. Chen and C. Guestrin, “XGBoost: A scalable tree boosting system,” inProceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining. ACM, 2016, pp. 785–794
2016
-
[22]
Estimation of tire-road friction by tire rotational vibration model,
T. Umeno, “Estimation of tire-road friction by tire rotational vibration model,”R&D Review of Toyota CRDL, vol. 37, no. 3, pp. 53–58, 2002
2002
-
[23]
Estimation of tire-road friction coefficient based on frequency domain data fusion,
L. Chen, Y . Luo, M. Bian, Z. Qin, J. Luo, and K. Li, “Estimation of tire-road friction coefficient based on frequency domain data fusion,” Mechanical Systems and Signal Processing, vol. 85, pp. 177–192, 2017
2017
-
[24]
1d convolutional neural networks and applications: A survey,
S. Kiranyaz, O. Avci, O. Abdeljaber, T. Ince, M. Gabbouj, and D. J. Inman, “1d convolutional neural networks and applications: A survey,” Mechanical Systems and Signal Processing, vol. 151, p. 107398, 2021
2021
-
[25]
Review of wavelet denoising algorithms,
A. Halidou, Y . Mohamadou, A. A. A. Ari, and E. J. G. Zacko, “Review of wavelet denoising algorithms,”Multimedia Tools and Applications, vol. 82, no. 27, pp. 41 539–41 569, 2023
2023
-
[26]
De-noising by soft-thresholding,
D. L. Donoho, “De-noising by soft-thresholding,”IEEE Transactions on Information Theory, vol. 41, no. 3, pp. 613–627, May 1995
1995
-
[27]
In: 2015 IEEE International Conference on Computer Vision (ICCV)
R. R. Selvaraju, M. Cogswell, A. Das, R. Vedantam, D. Parikh, and D. Batra, “Grad-cam: Visual explanations from deep networks via gradient-based localization,” in2017 IEEE International Conference on Computer Vision (ICCV). IEEE, Oct. 2017, p. 618–626. [Online]. Available: http://dx.doi.org/10.1109/ICCV .2017.74
-
[28]
A direct tire capacity estimation method using deep learning with on-board sensor signals,
Y . Zhang, N. Xu, Z. Yin, and K. Guo, “A direct tire capacity estimation method using deep learning with on-board sensor signals,” IEEE Transactions on Vehicular Technology, p. 1–15, 2025. [Online]. Available: http://dx.doi.org/10.1109/TVT.2025.3540942
-
[29]
Adversarial training methods for deep learning: A systematic review,
W. Zhao, S. Alwidian, and Q. H. Mahmoud, “Adversarial training methods for deep learning: A systematic review,”Algorithms, vol. 15, no. 8, p. 283, Aug. 2022. [Online]. Available: http: //dx.doi.org/10.3390/a15080283
-
[30]
F. Liu, Y . Wu, Y . Mo, Y . Liao, and Y . He, “Road friction coefficient estimation via weakly supervised semantic segmentation and uncertainty estimation,”International Journal of Pattern Recognition and Artificial Intelligence, vol. 36, no. 14, Oct. 2022. [Online]. Available: http://dx.doi.org/10.1142/S0218001422580095
-
[31]
Roadsaw: A large-scale dataset for camera- based road surface and wetness estimation,
K. Cordes, C. Reinders, P. Hindricks, J. Lammers, B. Rosenhahn, and H. Broszio, “Roadsaw: A large-scale dataset for camera- based road surface and wetness estimation,” in2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW). IEEE, Jun. 2022, p. 4439–4448. [Online]. Available: http://dx.doi.org/10.1109/CVPRW56347.2022.00490
-
[32]
Road friction estimation based on vision for safe autonomous driving,
T. Zhao, P. Guo, and Y . Wei, “Road friction estimation based on vision for safe autonomous driving,”Mechanical Systems and Signal Processing, vol. 208, p. 111019, Feb. 2024. [Online]. Available: http://dx.doi.org/10.1016/j.ymssp.2023.111019
-
[33]
Use of ice detection sensors for improving winter road safety,
T. DiLorenzo and X. Yu, “Use of ice detection sensors for improving winter road safety,”Accident Analysis & Prevention, vol. 191, p. Fig. 8: Performance of feature based model on snow runs. Fig. 9: CNN Training and validation loss curve over epochs. 107197, Oct. 2023. [Online]. Available: http://dx.doi.org/10.1016/j.aap. 2023.107197
-
[34]
Vehicle stability control system of emergency brake on split-mu road,
E. Dong and L. Zhang, “Vehicle stability control system of emergency brake on split-mu road,” in2017 9th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC). IEEE, Aug. 2017, p. 252–255. [Online]. Available: http://dx.doi.org/10.1109/IHMSC.2017.65 Fig. 10: Real time inference pipeline. Algorithm 1Mode Filter with Threshol...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.