A Variational Shape Optimisation Approach to Multi-region Relaxed Magnetohydrodynamic Equilibria
Pith reviewed 2026-06-28 08:26 UTC · model grok-4.3
The pith
MRxMHD equilibrium equations are necessary and sufficient for B and a metric to stationarize the magnetic energy under fixed pressure, relative helicity and flux constraints.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We show that the multi-region relaxed magnetohydrodynamics (MRxMHD) equilibrium equations are necessary and sufficient conditions for B and a metric to yield a stationary point of the magnetic energy under appropriate constraints. We constrain the pressure, relative helicity, and magnetic flux of B through all smooth surfaces in each subregion whose boundary lies on the interface. We identify a previously overlooked gauge condition. A definition for relative helicity is introduced, its gauge invariance is proved, and the existence of a gauge where relative helicity reduces to conventional helicity is demonstrated. In the case of a single region an additional condition is introduced that is s
What carries the argument
The variational stationary-point condition on the magnetic energy functional, with the MRxMHD equations serving as its necessary and sufficient characterisation under the stated constraints.
If this is right
- Equilibrium solutions can be located by performing shape optimisation of the interfaces while keeping the listed quantities fixed.
- The MRxMHD equations become the Euler-Lagrange conditions of the constrained energy functional.
- Relative helicity is unambiguously defined and invariant under the allowed gauge transformations.
- In the single-region setting the extra condition guarantees that stationary points are local energy minimisers.
Where Pith is reading between the lines
- Numerical codes could iteratively deform the interfaces between regions to drive the energy to a stationary value while preserving the constraints.
- The same variational structure may apply to other relaxed models in ideal fluid dynamics beyond MHD.
- Known analytic equilibria could be tested by checking whether their energy variation vanishes under small interface displacements.
Load-bearing premise
The domain admits a partition into finitely many compact connected subregions with smooth boundaries, and the pressure, relative helicity and flux constraints are treated as fixed and independent of the variation.
What would settle it
A concrete counter-example: a partitioned domain together with a smooth divergence-free B tangent to each interface, such that the MRxMHD equations hold yet the first variation of the magnetic energy is nonzero for some admissible perturbation of the metric or the interfaces.
Figures
read the original abstract
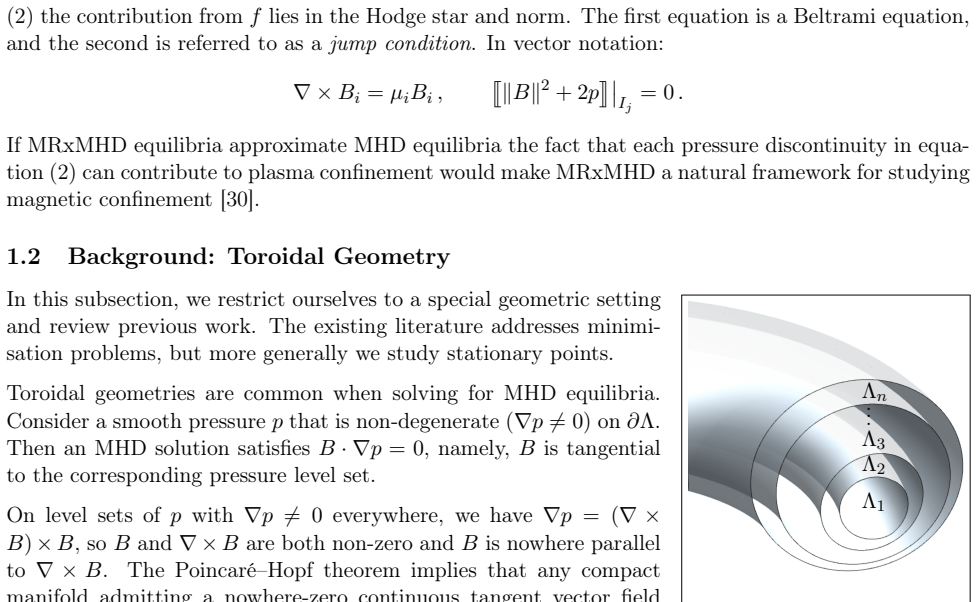
Let $\Lambda \subset\mathbb{R}^3$ be a region admitting a partition into $n$ compact, connected subregions $\Lambda_1,\dots,\Lambda_n$, each with smooth boundary. Consider a vector field $B$ on $\Lambda$ where $B|_{\Lambda_i}$ is smooth, divergence free, and tangent to $\partial \Lambda_i$ for all $i$. We show that the multi-region relaxed magnetohydrodynamics (MRxMHD) equilibrium equations are necessary and sufficient conditions for $ B $ and a metric to yield a stationary point of the magnetic energy under appropriate constraints. We constrain the pressure, relative helicity, and magnetic flux of $B$ through all smooth surfaces in $\Lambda_i$ whose boundary lies on $\partial \Lambda_i$. We identify a previously overlooked gauge condition. A definition for relative helicity is introduced, its gauge invariance is proved, and the existence of a gauge where relative helicity reduces to conventional helicity is demonstrated. In the case of a single region an additional condition is introduced that is sufficient to ensure a critical point of the magnetic energy is also a minimiser.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript claims that the multi-region relaxed magnetohydrodynamics (MRxMHD) equilibrium equations are necessary and sufficient conditions for a divergence-free vector field B (tangent to subregion boundaries) and an associated metric to be a stationary point of the magnetic energy, subject to fixed pressure, relative helicity, and flux constraints through surfaces whose boundaries lie on the interfaces. It introduces a definition of relative helicity, proves its gauge invariance, demonstrates existence of a gauge reducing it to conventional helicity, identifies an overlooked gauge condition, and (for the single-region case) supplies an additional condition ensuring a critical point is a minimizer.
Significance. If the necessity-and-sufficiency result holds after verification of the shape-variation terms, the work supplies a direct variational derivation of MRxMHD equilibria from an energy principle, which is a substantive theoretical contribution to plasma equilibrium theory. The gauge-invariance proof for the relative-helicity definition and the explicit identification of the overlooked gauge condition are clear strengths that stand independently of the main claim.
major comments (2)
- [main theorem / derivation of stationary condition] The necessity/sufficiency claim (abstract and the main theorem) requires that the first variation of the constrained energy functional under interface shape changes produces no extraneous interface terms beyond the standard MRxMHD equations. The flux constraints are defined on surfaces whose boundaries move with the interfaces; the manuscript must therefore exhibit the explicit cancellation (or absorption into the multipliers) of the transport terms arising from the domain perturbation in the variation of the flux integrals. Without this step shown, the stationary-point condition may contain additional contributions not present in the target equations.
- [relative helicity section] The treatment of the relative-helicity constraint under the same shape variation must be checked for consistency with the gauge condition identified in the paper; any implicit dependence of the admissible gauges on the moving interfaces should be addressed so that the helicity variation does not introduce further interface conditions.
minor comments (2)
- [setup / notation] Clarify the precise functional space in which the metric variation is performed and whether the metric is varied independently or tied to the interface geometry.
- [single-region case] The single-region minimizer condition is stated only for n=1; a brief remark on why the multi-region case does not admit an analogous statement would be helpful.
Simulated Author's Rebuttal
We thank the referee for the careful reading and for highlighting the need for explicit verification of the shape-variation terms in the necessity-and-sufficiency argument. We address each major comment below and will incorporate the requested clarifications.
read point-by-point responses
-
Referee: [main theorem / derivation of stationary condition] The necessity/sufficiency claim (abstract and the main theorem) requires that the first variation of the constrained energy functional under interface shape changes produces no extraneous interface terms beyond the standard MRxMHD equations. The flux constraints are defined on surfaces whose boundaries move with the interfaces; the manuscript must therefore exhibit the explicit cancellation (or absorption into the multipliers) of the transport terms arising from the domain perturbation in the variation of the flux integrals. Without this step shown, the stationary-point condition may contain additional contributions not present in the target equations.
Authors: We agree that the explicit cancellation of transport terms arising from the moving boundaries of the flux surfaces must be shown in detail. Although the original derivation absorbed these contributions into the multipliers via the definition of the constrained functional, the intermediate steps were not written out. In the revised manuscript we will add a dedicated subsection (or appendix) that computes the first variation of each flux integral under the interface perturbation, demonstrates the exact cancellation of the transport terms, and confirms that no additional interface conditions appear. This will make the necessity-and-sufficiency statement fully rigorous. revision: yes
-
Referee: [relative helicity section] The treatment of the relative-helicity constraint under the same shape variation must be checked for consistency with the gauge condition identified in the paper; any implicit dependence of the admissible gauges on the moving interfaces should be addressed so that the helicity variation does not introduce further interface conditions.
Authors: The gauge condition we introduce is formulated so that admissible gauges are independent of the instantaneous interface geometry; the gauge-invariance proof already holds for any fixed domain. Nevertheless, to address the referee’s concern we will insert a short paragraph immediately after the gauge-condition statement that verifies the helicity variation remains consistent when the interfaces are perturbed. Because the relative-helicity definition is constructed from differences of vector potentials that satisfy the same gauge condition on both sides of each interface, the variation produces only the standard MRxMHD interface jump conditions already present in the energy functional; no new interface conditions arise. revision: yes
Circularity Check
No circularity: direct variational derivation from energy functional
full rationale
The paper derives that MRxMHD equilibrium equations are necessary and sufficient for stationary points of magnetic energy under independent constraints on pressure, relative helicity, and flux through surfaces with boundary on interfaces. This is a first-principles variational argument on a partitioned domain with smooth B fields, introducing a gauge condition and relative helicity definition with proved invariance. No step reduces by construction to fitted inputs, self-citations, or ansatzes; the central claim stands on external physical constraints and standard calculus of variations without self-referential reduction. The derivation is self-contained against the stated assumptions.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Lambda admits a partition into n compact connected subregions each with smooth boundary
- domain assumption B restricted to each Lambda_i is smooth, divergence-free, and tangent to partial Lambda_i
Reference graph
Works this paper leans on
-
[1]
V. I. Arnold and B. A. Khesin. Topological methods in hydrodynamics.Annual Review of Fluid Mechanics, 24(Volume 24, 1992):145–166, 1992
1992
-
[2]
E. Z. (auth.).Nonlinear Functional Analysis and its Applications: III: Variational Methods and Optimization. Springer, 1 edition, 1985
1985
-
[3]
Bott and L
R. Bott and L. W. Tu.Differential forms in algebraic topology, volume 82. Springer Science & Business Media, 2013
2013
-
[4]
O. P. Bruno and P. Laurence. Existence of three-dimensional toroidal mhd equilibria with non- constant pressure.Communications on Pure and Applied Mathematics, 49(7):717–764, Jul 1996. Funding by NSF
1996
-
[5]
Cantarella
J. Cantarella. Topological structure of stable plasma flows.Dissertations available from ProQuest, 01 1999
1999
-
[6]
Cantarella, D
J. Cantarella, D. DeTurck, and H. Gluck. Vector calculus and the topology of domains in 3-space. The American mathematical monthly, 109(5):409–442, 2002
2002
-
[7]
Cantarella, D
J. Cantarella, D. DeTurck, H. Gluck, and M. Teytel. Isoperimetric problems for the helicity of vector fields and the biot–savart and curl operators.Journal of Mathematical Physics, 41(8):5615– 5641, 08 2000
2000
-
[8]
Cantarella and J
J. Cantarella and J. Parsley. A new cohomological formula for helicity inR2k+1 reveals the effect of a diffeomorphism on helicity.Journal of Geometry and Physics, 60(9):1127–1155, 2010
2010
-
[9]
F. F. Chen et al.Introduction to plasma physics and controlled fusion, volume 1. Springer, 1984
1984
-
[10]
Chodura and A
R. Chodura and A. Schlüter. A 3d code for mhd equilibrium and stability.Journal of Computa- tional Physics, 41(1):68–88, 1981
1981
-
[11]
G. R. Dennis, S. R. Hudson, R. L. Dewar, and M. J. Hole. The infinite interface limit of multiple- region relaxed magnetohydrodynamics.Physics of Plasmas, 20(3):032509, 03 2013
2013
-
[12]
G. R. Dennis, S. R. Hudson, R. L. Dewar, and M. J. Hole. Multi-region relaxed magnetohydro- dynamics with anisotropy and flow.Physics of Plasmas, 21(7), 2014
2014
-
[13]
Dewar, Z
R. Dewar, Z. Yoshida, A. Bhattacharjee, and S. Hudson. Variational formulation of relaxed and multi-region relaxed magnetohydrodynamics.Journal of Plasma Physics, 81(6):515810604, 2015
2015
-
[14]
Dudt and E
D. Dudt and E. Kolemen. Desc: a stellarator equilibrium solver.Physics of Plasmas, 27(10), 2020
2020
-
[15]
Enciso, A
A. Enciso, A. Luque, and D. Peralta-Salas. Mhd equilibria with nonconstant pressure in nonde- generate toroidal domains.Journal of the European Mathematical Society, 2023. 22
2023
-
[16]
J. P. Freidberg.Ideal MHD. Cambridge University Press, 2014
2014
-
[17]
W. Gerner. Existence and characterisation of magnetic energy minimisers on oriented, compact riemannian 3-manifolds with boundary in arbitrary helicity classes.Annals of Global Analysis and Geometry, 07 2019
2019
-
[18]
Gilbarg, N
D. Gilbarg, N. S. Trudinger, D. Gilbarg, and N. Trudinger.Elliptic partial differential equations of second order, volume 2. Springer, 1998
1998
-
[19]
H. Glockner. Fundamentals of submersions and immersions between infinite-dimensional mani- folds.arXiv preprint arXiv:1502.05795, 2015
Pith/arXiv arXiv 2015
-
[20]
H. Grad. Toroidal Containment of a Plasma.The Physics of Fluids, 10(1):137–154, 01 1967
1967
-
[21]
Hatcher.Algebraic topology
A. Hatcher.Algebraic topology. Cambridge University Press, 2005
2005
-
[22]
Hayashi, T
T. Hayashi, T. Sato, H. Gardner, and J. Meiss. Evolution of magnetic islands in a heliac.Physics of Plasmas, 2(3):752–759, 1995
1995
-
[23]
R. D. Hazeltine and J. D. Meiss.Plasma confinement. Courier Corporation, 2003
2003
-
[24]
Helander and S
P. Helander and S. Newton. Ideal magnetohydrodynamic stability of configurations without nested flux surfaces.Physics of Plasmas, 20(6), 2013
2013
-
[25]
Helander and A
P. Helander and A. Simakov. Intrinsic ambipolarity and rotation in stellarators.Physical review letters, 101(14):145003, 2008
2008
-
[26]
Henrot and M
A. Henrot and M. Pierre.Shape variation and optimization. European Mathematical Society- EMS-Publishing House GmbH, 2018
2018
-
[27]
Hirshman, P
S. Hirshman, P. Merkel, et al. Three-dimensional free boundary calculations using a spectral green’s function method.Computer Physics Communications, 43(1):143–155, 1986
1986
-
[28]
S. P. Hirshman, R. Sanchez, and C. Cook. Siesta: A scalable iterative equilibrium solver for toroidal applications.Physics of Plasmas, 18(6), 2011
2011
-
[29]
Hudson, J
S. Hudson, J. Loizu, C. Zhu, Z. Qu, C. Nührenberg, S. Lazerson, C. Smiet, and M. Hole. Free- boundary mrxmhd equilibrium calculations using the stepped-pressure equilibrium code.Plasma Physics and Controlled Fusion, 62(8):084002, 2020
2020
-
[30]
S. R. Hudson, R. L. Dewar, G. Dennis, M. J. Hole, M. McGann, G. von Nessi, and S. Lazer- son. Computation of multi-region relaxed magnetohydrodynamic equilibria.Physics of Plasmas, 19(11):112502, 11 2012
2012
-
[31]
Kedia, D
H. Kedia, D. Foster, M. R. Dennis, and W. T. M. Irvine. Weaving knotted vector fields with tunable helicity.Phys. Rev. Lett., 117:274501, Dec 2016
2016
-
[32]
Kriegl and P
A. Kriegl and P. W. Michor.The convenient setting of global analysis, volume 53. American Mathematical Soc., 1997
1997
-
[33]
Laurence and M
P. Laurence and M. Avellaneda. On Woltjer’s variational principle for force-free fields.Journal of mathematical physics, 32(5):1240–1253, 1991
1991
-
[34]
Lee and A
J. Lee and A. Cerfon. Ecom: A fast and accurate solver for toroidal axisymmetric mhd equilibria. Computer Physics Communications, 190:72–88, 2015
2015
-
[35]
J. M. Lee.Introduction to Smooth Manifolds, volume 218 ofGraduate Texts in Mathematics. Springer, 2012
2012
-
[36]
Loizu, S
J. Loizu, S. Hudson, and C. Nührenberg. Verification of the spec code in stellarator geometries. Physics of Plasmas, 23(11), 2016
2016
-
[37]
MacTaggart and A
D. MacTaggart and A. Valli. Relative magnetic helicity in multiply connected domains.Journal of Physics A: Mathematical and Theoretical, 56(43):435701, oct 2023. 23
2023
-
[38]
R. J. Parsley.The Taylor problem in plasma physics. PhD thesis, University of Pennsylvania, 2001
2001
-
[39]
Pataki, A
A. Pataki, A. J. Cerfon, J. P. Freidberg, L. Greengard, and M. O’Neil. A fast, high-order solver for the grad–shafranov equation.Journal of Computational Physics, 243:28–45, 2013
2013
-
[40]
Pfefferlé, L
D. Pfefferlé, L. Noakes, and D. Perrella. Gauge freedom in magnetostatics and the effect on helicity in toroidal volumes.Journal of Mathematical Physics, 62(9):093505, 09 2021
2021
-
[41]
Z. Qu, R. L. Dewar, F. Ebrahimi, J. K. Anderson, S. R. Hudson, and M. J. Hole. Stepped pressure equilibrium with relaxed flow and applications in reversed-field pinch plasmas.Plasma Physics and Controlled Fusion, 62(5):054002, 2020
2020
-
[42]
Reiman and H
A. Reiman and H. Greenside. Calculation of three-dimensional mhd equilibria with islands and stochastic regions.Computer Physics Communications, 43(1):157–167, 1986
1986
-
[43]
Schwarz.Hodge Decomposition : A Method for Solving Boundary Value Problems
G. Schwarz.Hodge Decomposition : A Method for Solving Boundary Value Problems. Lecture Notes in Mathematics ; 1607. Springer-Verlag, Berlin, 1995
1995
-
[44]
H. Seifert. Über das geschlecht von knoten.Mathematische Annalen, 110(1):571–592, 1935
1935
-
[45]
Takeda and S
T. Takeda and S. Tokuda. Computation of mhd equilibrium of tokamak plasma.Journal of computational physics, 93(1):1–107, 1991
1991
-
[46]
Tret’Yakov
A. Tret’Yakov. Necessary and sufficient conditions for optimality of p-th order.USSR Computa- tional Mathematics and Mathematical Physics, 24(1):123–127, 1984
1984
-
[47]
F. W. Warner.Foundations of differentiable manifolds and Lie groups, volume 94. Springer Science & Business Media, 1983
1983
-
[48]
H. Whitney. Analytic extensions of differentiable functions defined in closed sets. InHassler Whitney Collected Papers, pages 228–254. Springer, 1992
1992
-
[49]
Yoshida and R
Z. Yoshida and R. Dewar. Helical bifurcation and tearing mode in a plasma—a description based on casimir foliation.Journal of Physics A: Mathematical and Theoretical, 45(36):365502, 2012
2012
-
[50]
Zakharov and A
L. Zakharov and A. Pletzer. Theory of perturbed equilibria for solving the grad-shafranov equa- tion.Physics of Plasmas, 6(12):4693, 1999
1999
-
[51]
E. Zeidler. Nonlinear functional analysis and its applications, vol. i: Fixed point theorems, no- ordhoff, groningen, the netherlands, 1964, 1986. 24 Appendix A De Rham Cohomology and Singular Homology A.1 Construction For eachk∈Z, the set of all smoothk-forms onΛ i isΩ k(Λi). This set is an abelian group with a homomorphism given by the exterior derivati...
1964
-
[52]
= Z J∗(η4) J ∗(dη3 +η ∗
-
[53]
HereJis the usual boundary inclusion map
= 0. HereJis the usual boundary inclusion map. The only way to achieve this is when[η∗ 4] = 0. Noting that0 = [⋆η ∗ 4]∈H 1 dR(Λi, ∂Λi)has a unique harmonic representative, we have thatη ∗ 4 = 0. Hence, b=dη 3 is exact. B.1 General Formulation Given any choice of bases forH1(Λi)andH 1(Λ c i)one can, of course, define a basis forHk(∂Λi)(Lemma 2.3). Theorem ...
-
[54]
Our computation of[Ti,j]relies on cohomology elements[s∗ i,j]
In some knotted cases constructings i,j via boundaries of Seifert surfaces may provide geometric intuition (see [44]). Our computation of[Ti,j]relies on cohomology elements[s∗ i,j]. We may compute a representative closed 1-forms ∗ i,j ∈Ω 1(Λi)through the relation δjk = Z si,j s∗ i,k . Selectings ∗ i,1 =dϑ P ands ∗ i,2 =dϑ T we verify that Z si,1 s∗ i,1 = ...
-
[55]
The first term(η−P(η))lies inker(L), becauseL(η−L(η)ν) =L(η)−L(η)L(ν) = 0
-
[56]
The second termP(η)lies inM=span{ν}
-
[57]
This induces the topological direct sumE= ker(L)⊕M
The intersectionker(L)∩Mis trivial, asL(cν) = 0impliesc= 0. This induces the topological direct sumE= ker(L)⊕M. SinceM ∼= R, it is a closed subspace, and soker(d ηigi)is complemented inT ηiΩ1 D(Λi). B.6 Lagrange Multipliers The definition of a critical pointηi for an objective functionF: Ω1 D(Λi)→R, subject to the constraint gi(ηi) =h i, is given by the c...
1934
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.