Station-Keeping Approach for Extremely Low Lunar Orbits with Solar Sailing
Pith reviewed 2026-06-27 23:57 UTC · model grok-4.3
The pith
Solar sails can maintain spacecraft in extremely low lunar orbits for at least one year without any propellant.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
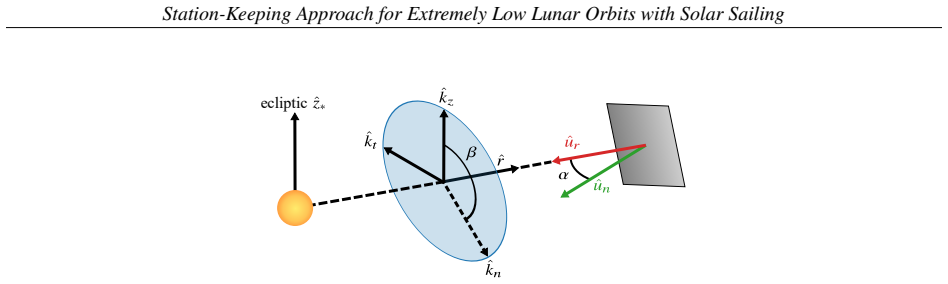
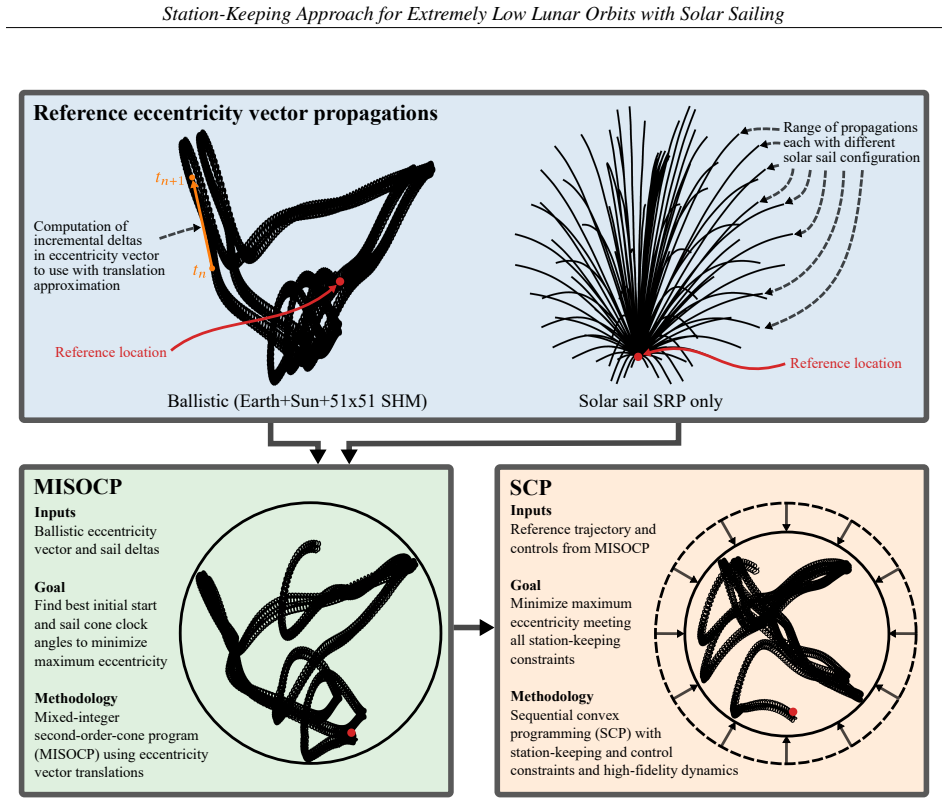
A two-stage framework is introduced for solar sail station-keeping in eLLOs. The first stage uses mixed-integer second-order cone programming to select orbit and sail configurations that leverage the translational behavior of the eccentricity vector. The second stage applies sequential convex programming with lossless convexification to generate high-fidelity trajectories. A case study shows that a realistic solar sail spacecraft can be maintained in the eLLO regime for at least one year without propellant expenditure.
What carries the argument
Two-stage optimization framework with MISOCP for favorable configuration selection based on eccentricity vector translation and SCP for trajectory refinement using convexified solar sail dynamics.
If this is right
- The approach works with control updates as infrequent as once per month.
- The method has low sensitivity to model uncertainties.
- Indefinite station-keeping in eLLOs may be feasible with solar sails.
- Propellant-free sustained operations become possible at altitudes below 50 km around the Moon.
Where Pith is reading between the lines
- This could enable new classes of lunar science missions that require prolonged low-altitude data collection.
- The technique might apply to station-keeping around other small bodies with irregular gravity fields.
- Combining this with occasional low-thrust corrections could further extend mission durations.
Load-bearing premise
Predictable behavior in the eccentricity vector from the lunar translation theorem can be leveraged by solar sail control to counteract perturbations in extremely low lunar orbits.
What would settle it
A high-fidelity simulation or actual flight data showing that the eccentricity vector grows uncontrollably and leads to surface impact within one year despite the proposed sail control strategy would disprove the feasibility claim.
Figures

















read the original abstract
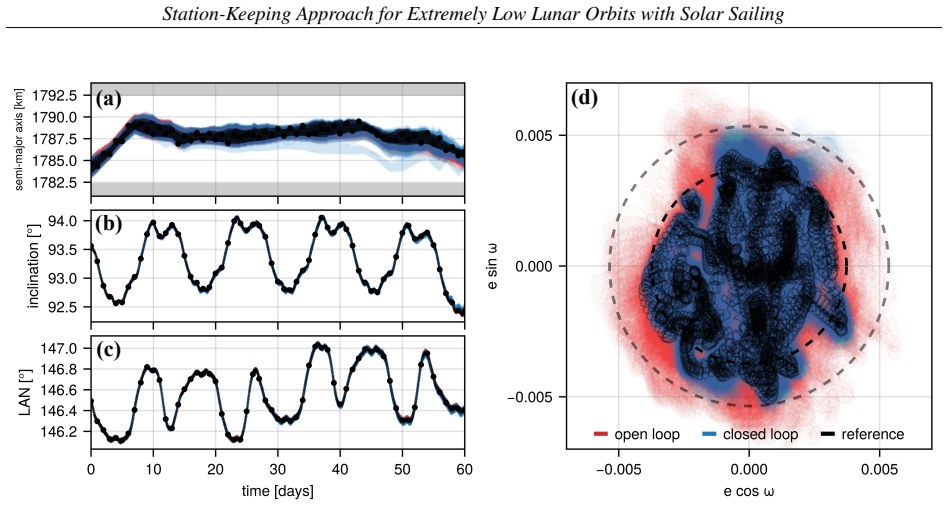
Renewed interest in cislunar space has created opportunities for sustained operations in extremely low-lunar orbits (eLLOs), where altitudes below 50~km enable close surface proximity. However, these orbits are strongly perturbed by the irregular lunar gravity field, leading to rapid eccentricity growth, high station-keeping costs or even surface impact. Recent advances in our understanding of the lunar `translation theorem' have revealed predictable behavior in the eccentricity vector, offering new opportunities for efficient control. This paper introduces a two-stage framework for solar sail station-keeping in eLLOs. First, a mixed-integer second-order cone programming (MISOCP) approach leverages the translational behavior of the eccentricity vector to identify orbit and sail configurations favorable for station-keeping. Second, a lightweight sequential convex programming (SCP) formulation refines these into high-fidelity trajectories, enabled by a recently developed lossless convexification of solar sail dynamics. A case study inspired by the Lunar Reconnaissance Orbiter (LRO) mission demonstrates that a realistic solar sail spacecraft can be maintained within the eLLO regime for at least 1~year without propellant expenditure, suggesting that longer-duration, or even indefinite station-keeping, may be feasible. The approach remains effective at reduced control update frequencies (down to monthly) and exhibits low sensitivity to uncertainties.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces a two-stage framework for solar-sail station-keeping in extremely low lunar orbits (eLLOs): a mixed-integer second-order cone program (MISOCP) that selects orbit and sail configurations by leveraging predictable eccentricity-vector translation from the lunar translation theorem, followed by a sequential convex programming (SCP) refinement step that uses a lossless convexification of solar-sail dynamics. A Lunar Reconnaissance Orbiter-inspired case study claims that a realistic solar-sail spacecraft can be maintained inside the eLLO regime for at least one year with zero propellant expenditure, and that the approach remains effective at monthly control updates with low sensitivity to uncertainties.
Significance. If the central claim is validated, the work would demonstrate a practical route to propellant-free, long-duration operations at altitudes below 50 km, which is of clear operational value for lunar remote-sensing and surface-proximity missions.
major comments (2)
- [Abstract and §3] Abstract and §3 (MISOCP stage): the framework explicitly rests on the lunar translation theorem supplying predictable eccentricity-vector behavior that can be exploited for control selection. The theorem is stated for unforced motion; once continuous solar-sail acceleration is introduced, the eccentricity-vector dynamics are no longer guaranteed to obey the same translation rule. The manuscript must demonstrate (analytically or numerically) that the controlled trajectories remain sufficiently close to the unforced translation behavior for the MISOCP-selected configurations to retain their station-keeping property.
- [Case-study section] Case-study section: the abstract reports a successful one-year station-keeping result but supplies no quantitative validation details (e.g., maximum eccentricity excursion, position error statistics, or Monte-Carlo sensitivity runs). Without these metrics it is impossible to judge whether the 1-year claim is robust or merely a single nominal trajectory.
minor comments (1)
- The phrase 'low sensitivity to uncertainties' is used without defining the uncertainty sources or reporting the associated sensitivity metrics.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments. We address each major comment below and will revise the manuscript accordingly to strengthen the presentation and validation of the results.
read point-by-point responses
-
Referee: [Abstract and §3] Abstract and §3 (MISOCP stage): the framework explicitly rests on the lunar translation theorem supplying predictable eccentricity-vector behavior that can be exploited for control selection. The theorem is stated for unforced motion; once continuous solar-sail acceleration is introduced, the eccentricity-vector dynamics are no longer guaranteed to obey the same translation rule. The manuscript must demonstrate (analytically or numerically) that the controlled trajectories remain sufficiently close to the unforced translation behavior for the MISOCP-selected configurations to retain their station-keeping property.
Authors: We acknowledge that the lunar translation theorem is derived for unforced motion and that continuous solar-sail acceleration introduces a perturbation whose effect on eccentricity-vector translation must be quantified. The MISOCP stage employs the theorem to identify configurations in which the sail acceleration remains a small, directed perturbation relative to the dominant gravitational translation. The subsequent SCP stage enforces the full nonlinear dynamics. To address the concern directly, we will add a new numerical subsection in §3 that compares eccentricity-vector evolution for the selected configurations under unforced motion versus the controlled SCP trajectories. This will demonstrate that the deviation remains below a threshold (to be quantified) sufficient to preserve the station-keeping property identified by the MISOCP. revision: yes
-
Referee: [Case-study section] Case-study section: the abstract reports a successful one-year station-keeping result but supplies no quantitative validation details (e.g., maximum eccentricity excursion, position error statistics, or Monte-Carlo sensitivity runs). Without these metrics it is impossible to judge whether the 1-year claim is robust or merely a single nominal trajectory.
Authors: We agree that the case-study section would be strengthened by explicit quantitative metrics. The current manuscript presents the one-year result primarily through trajectory plots and a qualitative description of the LRO-inspired scenario. In the revision we will augment the case-study section with the requested statistics: maximum eccentricity excursion, position-error time histories (mean and RMS), and Monte-Carlo results under representative uncertainties in initial state, sail optical properties, and lunar gravity model. These additions will allow readers to assess the robustness of the one-year claim beyond the nominal trajectory. revision: yes
Circularity Check
Minor reliance on external recent advance in lunar translation theorem; derivation remains self-contained
full rationale
The paper's two-stage MISOCP+SCP framework explicitly invokes the lunar translation theorem as an external input to leverage predictable eccentricity-vector behavior for selecting favorable sail configurations. No equations, fitted parameters, or self-citations are shown to reduce the 1-year station-keeping result to a tautological input or prior author work by construction. The central claim therefore retains independent content from the convex optimization steps and high-fidelity refinement, consistent with a low circularity finding.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Stationkeeping for the Lunar Reconnaissance Orbiter (LRO)
Mark Beckman and Rivers Lamb. Stationkeeping for the Lunar Reconnaissance Orbiter (LRO). InProceedings of the 20th International Symposium on Space Flight Dynamics, Annapolis, Maryland, September 2007
2007
-
[2]
Maneuver Operations Results from the Lunar Reconnaissance Orbiter (LRO) Mission
Michael Mesarch, Mark Beckman, David Folta, Rivers Lamb, and Karen Richon. Maneuver Operations Results from the Lunar Reconnaissance Orbiter (LRO) Mission. InSpaceOps 2010 Conference, Huntsville, Alabama, April
2010
-
[3]
American Institute of Aeronautics and Astronautics. ISBN 978-1-62410-164-9. doi: 10.2514/6.2010-1985
-
[4]
Low Lunar Orbit Design via Graphical Manipulation of Eccentricity Vector Evolution
Mark Wallace, Theodore Sweetser, and Ralph Roncoli. Low Lunar Orbit Design via Graphical Manipulation of Eccentricity Vector Evolution. InAIAA/AAS Astrodynamics Specialist Conference, Minneapolis, Minnesota, August 2012. American Institute of Aeronautics and Astronautics. ISBN 978-1-62410-182-3. doi: 10.2514/6. 2012-4748. 26 Station-Keeping Approach for E...
work page doi:10.2514/6 2012
-
[5]
Origins and Application of the Translation Theorem in Extremely Low Lunar Orbits.Journal of Guidance, Control, and Dynamics, 49(3):673–692, March
Jack Yarndley, Martin Lara, Harry Holt, and Roberto Armellin. Origins and Application of the Translation Theorem in Extremely Low Lunar Orbits.Journal of Guidance, Control, and Dynamics, 49(3):673–692, March
- [6]
-
[7]
Alex S. Konopliv, Ryan S. Park, Dah-Ning Yuan, Sami W. Asmar, Michael M. Watkins, James G. Williams, Eugene Fahnestock, Gerhard Kruizinga, Meegyeong Paik, Dmitry Strekalov, Nate Harvey, David E. Smith, and Maria T. Zuber. The JPL lunar gravity field to spherical harmonic degree 660 from the GRAIL Primary Mission. Journal of Geophysical Research: Planets, ...
-
[8]
Felix R. Hoots, Paul W. Schumacher Jr, and Robert A. Glover. History of Analytical Orbit Modeling in the U. S. Space Surveillance System.Journal of Guidance, Control, and Dynamics, May 2012. doi: 10.2514/1.9161
-
[9]
Dirk Brouwer. Solution of the problem of artificial satellite theory without drag.The Astronomical Journal, 64: 378, November 1959. ISSN 0004-6256. doi: 10.1086/107958
-
[10]
The motion of a close earth satellite.The Astronomical Journal, 64:367, November 1959
Yoshihide Kozai. The motion of a close earth satellite.The Astronomical Journal, 64:367, November 1959. ISSN 0004-6256. doi: 10.1086/107957
-
[11]
Kaula.Theory of Satellite Geodesy: Applications of Satellites to Geodesy
William M. Kaula.Theory of Satellite Geodesy: Applications of Satellites to Geodesy. Dover Publications, Mineola, N.Y , dover ed edition, 2000. ISBN 978-0-486-41465-2
2000
-
[12]
Metris and P
G. Metris and P. Exertier. Semi-analytical theory of the mean orbital motion.Astronomy and Astrophysics, 294: 278–286, February 1995. ISSN 0004-6361
1995
-
[13]
Florent Deleflie, Gilles Métris, and Pierre Exertier. Long-Period Variations of the Eccentricity Vector Valid also for Near Circular Orbits around a Non-Spherical Body.Celestial Mechanics and Dynamical Astronomy, 94(1): 83–104, January 2006. ISSN 1572-9478. doi: 10.1007/s10569-005-1472-2
-
[14]
J. F. Palacián. Dynamics of a satellite orbiting a planet with an inhomogeneous gravitational field.Celestial Mechan- ics and Dynamical Astronomy, 98(4):219–249, August 2007. ISSN 1572-9478. doi: 10.1007/s10569-007-9078-5
-
[15]
Martin Lara. Design of long-lifetime lunar orbits: A hybrid approach.Acta Astronautica, 69(3-4):186–199, August 2011. ISSN 00945765. doi: 10.1016/j.actaastro.2011.03.009
-
[16]
Tao Nie and Pini Gurfil. Lunar frozen orbits revisited.Celestial Mechanics and Dynamical Astronomy, 130(10): 61, September 2018. ISSN 1572-9478. doi: 10.1007/s10569-018-9858-0
-
[17]
Frozen Orbits About the Moon.Journal of Guidance, Control, and Dynamics, 26 (2):238–243, March 2003
Antonio Elipe and Martin Lara. Frozen Orbits About the Moon.Journal of Guidance, Control, and Dynamics, 26 (2):238–243, March 2003. ISSN 0731-5090. doi: 10.2514/2.5064
-
[18]
David Folta and David Quinn. Lunar Frozen Orbits. InAIAA/AAS Astrodynamics Specialist Conference and Exhibit. American Institute of Aeronautics and Astronautics, August 2006. doi: 10.2514/6.2006-6749
-
[19]
Ryan P. Russell and Martin Lara. Long-Lifetime Lunar Repeat Ground Track Orbits.Journal of Guidance, Control, and Dynamics, 30(4):982–993, 2007. ISSN 0731-5090. doi: 10.2514/1.27104
-
[20]
A. Abad, A. Elipe, and E. Tresaco. Analytical Model to Find Frozen Orbits for a Lunar Orbiter.Journal of Guidance, Control, and Dynamics, 32(3):888–898, May 2009. ISSN 0731-5090. doi: 10.2514/1.38350
-
[21]
Juan Félix San-Juan, Rosario López, and Iván Pérez. High-Fidelity Semianalytical Theory for a Low Lunar Orbit.Journal of Guidance, Control, and Dynamics, 42(1):163–167, January 2019. ISSN 0731-5090. doi: 10.2514/1.G003849
-
[22]
Enhanced Station-Keeping Maneuver Control Technique for Delta-V Cost Reduction in Korea Pathfinder Lunar Orbiter
Diane C Davis, Jae-ik Park, Sujin Choi, Ryan Whitley, John Carrico, Dong-Young Rew, and Seok-Weon Choi. Enhanced Station-Keeping Maneuver Control Technique for Delta-V Cost Reduction in Korea Pathfinder Lunar Orbiter. InAAS/AIAA Astrodynamics Specialist Conference, Snowbird, Utah, August 2018
2018
-
[23]
Jose Rodrigo Cordova Alarcon, Necmi Cihan Orger, Sangkyun Kim, and Mengu Cho. Analysis of lifetime extension capabilities for CubeSats equipped with a low-thrust propulsion system for Moon missions.Acta Astronautica, 160:558–571, July 2019. ISSN 0094-5765. doi: 10.1016/j.actaastro.2018.11.040
-
[24]
Edoardo Maria Leonardi, Mauro Pontani, Stefano Carletta, and Paolo Teofilatto. Low-Thrust Nonlinear Orbit Control for Very Low Lunar Orbits.Applied Sciences, 14(5):1924, January 2024. ISSN 2076-3417. doi: 10.3390/app14051924
-
[25]
Marco Cinelli, Emiliano Ortore, Giovanni Mengali, Alessandro A. Quarta, and Christian Circi. Lunar orbits for telecommunication and navigation services.Astrodynamics, 8(1):209–220, March 2024. ISSN 2522-0098. doi: 10.1007/s42064-023-0191-3
-
[26]
Continuous Low Altitude Lunar Coverage using Solar- Sail-Controlled Near-Circular Orbits
Aidan Puno, Andrew Heaton, and Alisha Crawley. Continuous Low Altitude Lunar Coverage using Solar- Sail-Controlled Near-Circular Orbits. In48th Annual AAS Guidance, Navigation and Control Conference, Breckenridge, Colorado, February 2026. 27 Station-Keeping Approach for Extremely Low Lunar Orbits with Solar Sailing
2026
-
[27]
Sandeep Kumar Singh, Robyn Woollands, Ehsan Taheri, and John Junkins. Feasibility of quasi-frozen, near-polar and extremely low-altitude lunar orbits.Acta Astronautica, 166:450–468, January 2020. ISSN 00945765. doi: 10.1016/j.actaastro.2019.10.037
-
[28]
Jingxi Liu, Bo Xu, Chengzhang Li, and Muzi Li. Lifetime Extension of Ultra Low-Altitude Lunar Space- craft with Low-Thrust Propulsion System.Aerospace, 9(6):305, June 2022. ISSN 2226-4310. doi: 10.3390/aerospace9060305
-
[29]
Design of an Extended Mission for GRAIL
Theodore Sweetser, Mark Wallace, Sara Hatch, and Ralph Roncoli. Design of an Extended Mission for GRAIL. InAIAA/AAS Astrodynamics Specialist Conference, Minneapolis, Minnesota, August 2012. American Institute of Aeronautics and Astronautics. ISBN 978-1-62410-182-3. doi: 10.2514/6.2012-4429
-
[30]
Hein, Luciana Tenorio, Josué Cardoso dos Santos, S
Maximilien Berthet, James Schalkwyk, Onur Çelik, Debdut Sengupta, Ken Fujino, Andreas M. Hein, Luciana Tenorio, Josué Cardoso dos Santos, S. Peter Worden, Philip D. Mauskopf, Yasuyuki Miyazaki, Ikkoh Funaki, Shinjiro Tsuji, Piotr Fil, and Kojiro Suzuki. Space sails for achieving major space exploration goals: Historical review and future outlook.Progress ...
-
[31]
Yuichi Tsuda, Osamu Mori, Ryu Funase, Hirotaka Sawada, Takayuki Yamamoto, Takanao Saiki, Tatsuya Endo, Katsuhide Yonekura, Hirokazu Hoshino, and Jun’ichiro Kawaguchi. Achievement of IKAROS — Japanese deep space solar sail demonstration mission.Acta Astronautica, 82(2):183–188, February 2013. ISSN 0094-5765. doi: 10.1016/j.actaastro.2012.03.032
-
[32]
NanoSail-D: A solar sail demonstration mission.Acta Astronautica, 68(5):571–575, March 2011
Les Johnson, Mark Whorton, Andy Heaton, Robin Pinson, Greg Laue, and Charles Adams. NanoSail-D: A solar sail demonstration mission.Acta Astronautica, 68(5):571–575, March 2011. ISSN 0094-5765. doi: 10.1016/j.actaastro.2010.02.008
-
[33]
David A. Spencer, Bruce Betts, John M. Bellardo, Alex Diaz, Barbara Plante, and Justin R. Mansell. The LightSail 2 solar sailing technology demonstration.Advances in Space Research, 67(9):2878–2889, May 2021. ISSN 0273-1177. doi: 10.1016/j.asr.2020.06.029
-
[34]
Pezent, Rohan Sood, Andrew Heaton, Kyle Miller, and Les Johnson
James B. Pezent, Rohan Sood, Andrew Heaton, Kyle Miller, and Les Johnson. Preliminary trajectory design for NASA’s Solar Cruiser: A technology demonstration mission.Acta Astronautica, 183:134–140, June 2021. ISSN 0094-5765. doi: 10.1016/j.actaastro.2021.03.006
-
[35]
William K. Wilkie. Overview of the NASA Advanced Composite Solar Sail System (ACS3) Technology Demonstration Project. InAIAA Scitech 2021 F orum. American Institute of Aeronautics and Astronautics, 2021. doi: 10.2514/6.2021-1260
-
[36]
Gregory Lantoine, Andrew Cox, Theodore Sweetser, Dan Grebow, Gregory Whiffen, David Garza, Anastassios Petropoulos, Kenshiro Oguri, Julie Kangas, Gerhard Kruizinga, and Julie Castillo-Rogez. Trajectory & maneuver design of the NEA Scout solar sail mission.Acta Astronautica, 225:77–98, December 2024. ISSN 00945765. doi: 10.1016/j.actaastro.2024.08.039
-
[37]
Colin Robert McInnes.Solar Sailing. Springer, London, 1999. ISBN 978-1-85233-102-3 978-1-4471-3992-8. doi: 10.1007/978-1-4471-3992-8
-
[38]
Review on solar sail technology.Astrodynamics, 3(2):93–125, June
Shengping Gong and Malcolm Macdonald. Review on solar sail technology.Astrodynamics, 3(2):93–125, June
-
[39]
doi: 10.1007/s42064-019-0038-x
ISSN 2522-0098. doi: 10.1007/s42064-019-0038-x
-
[40]
Spencer, Les Johnson, and Alexandra C
David A. Spencer, Les Johnson, and Alexandra C. Long. Solar sailing technology challenges.Aerospace Science and Technology, 93:105276, October 2019. ISSN 1270-9638. doi: 10.1016/j.ast.2019.07.009
-
[41]
Andrea Caruso, Lorenzo Niccolai, Alessandro A. Quarta, and Giovanni Mengali. Effects of attitude constraints on solar sail optimal interplanetary trajectories.Acta Astronautica, 177:39–47, December 2020. ISSN 0094-5765. doi: 10.1016/j.actaastro.2020.07.010
-
[42]
Kenshiro Oguri, Gregory Lantoine, and Jay W. McMahon. Solar Sailing Primer Vector Theory: Indirect Trajectory Optimization with Practical Mission Considerations.Journal of Guidance, Control, and Dynamics, 45(1):153–161,
- [43]
-
[44]
Runqi Chai, Al Savvaris, Antonios Tsourdos, Senchun Chai, and Yuanqing Xia. A review of optimization techniques in spacecraft flight trajectory design.Progress in Aerospace Sciences, 109:100543, August 2019. ISSN 0376-0421. doi: 10.1016/j.paerosci.2019.05.003
-
[45]
Successive Convexification: A Superlinearly Convergent Algorithm for Non-convex Optimal Control Problems, February 2019
Yuanqi Mao, Michael Szmuk, Xiangru Xu, and Behcet Acikmese. Successive Convexification: A Superlinearly Convergent Algorithm for Non-convex Optimal Control Problems, February 2019
2019
-
[46]
Reynolds, Michael Szmuk, Thomas Lew, Riccardo Bonalli, Marco Pavone, and Behçet Açıkme¸ se
Danylo Malyuta, Taylor P. Reynolds, Michael Szmuk, Thomas Lew, Riccardo Bonalli, Marco Pavone, and Behçet Açıkme¸ se. Convex Optimization for Trajectory Generation: A Tutorial on Generating Dynamically Feasible 28 Station-Keeping Approach for Extremely Low Lunar Orbits with Solar Sailing Trajectories Reliably and Efficiently.IEEE Control Systems, 42(5):40...
-
[47]
Boris Benedikter, Alessandro Zavoli, Guido Colasurdo, Simone Pizzurro, and Enrico Cavallini. Convex Approach to Three-Dimensional Launch Vehicle Ascent Trajectory Optimization.Journal of Guidance, Control, and Dynamics, 44(6):1116–1131, 2021. ISSN 0731-5090. doi: 10.2514/1.G005376
-
[48]
Xinyuan Miao, Yu Song, Zhiguo Zhang, and Shengping Gong. Successive Convexification for Ascent Trajectory Replanning of a Multistage Launch Vehicle Experiencing Nonfatal Dynamic Faults.IEEE Transactions on Aerospace and Electronic Systems, 58(3):2039–2052, June 2022. ISSN 1557-9603. doi: 10.1109/TAES.2021. 3133310
-
[49]
Behcet Acikmese and Scott R. Ploen. Convex Programming Approach to Powered Descent Guidance for Mars Landing.Journal of Guidance, Control, and Dynamics, 30(5):1353–1366, 2007. ISSN 0731-5090. doi: 10.2514/1.27553
-
[50]
Reynolds, Michael Szmuk, Danylo Malyuta, Mehran Mesbahi, Behçet Açıkme¸ se, and John M
Taylor P. Reynolds, Michael Szmuk, Danylo Malyuta, Mehran Mesbahi, Behçet Açıkme¸ se, and John M. Carson. Dual Quaternion-Based Powered Descent Guidance with State-Triggered Constraints.Journal of Guidance, Control, and Dynamics, 43(9):1584–1599, September 2020. ISSN 0731-5090. doi: 10.2514/1.G004536
-
[51]
Kamath, Purnanand Elango, Yue Yu, Skye Mceowen, Govind M
Abhinav G. Kamath, Purnanand Elango, Yue Yu, Skye Mceowen, Govind M. Chari, John M. Carson III, and Behçet Açıkme¸ se. Real-Time Sequential Conic Optimization for Multi-Phase Rocket Landing Guidance.IF AC- PapersOnLine, 56(2):3118–3125, January 2023. ISSN 2405-8963. doi: 10.1016/j.ifacol.2023.10.1444
-
[52]
Reduced Space Sequential Convex Programming for Rapid Trajectory Optimization.IEEE Transactions on Aerospace and Electronic Systems, 60(6):9060–9072, December
Yangyang Ma, Binfeng Pan, and Jingyuan Tang. Reduced Space Sequential Convex Programming for Rapid Trajectory Optimization.IEEE Transactions on Aerospace and Electronic Systems, 60(6):9060–9072, December
-
[53]
doi: 10.1109/TAES.2024.3437330
ISSN 1557-9603. doi: 10.1109/TAES.2024.3437330
-
[54]
PhD thesis, Politecnico di Milano, 2023
Christian Hofmann.Computational Guidance for Low-Thrust Spacecraft in Deep Space Based on Convex Optimization. PhD thesis, Politecnico di Milano, 2023
2023
-
[55]
Potential of Diffractive Sail’s Sun-Earth Equilibria for Continuous Polar Observation,
Naoya Kumagai and Kenshiro Oguri. Adaptive-Mesh Sequential Convex Programming for Space Trajectory Optimization.Journal of Guidance, Control, and Dynamics, 0(0):1–8, 2024. ISSN 0731-5090. doi: 10.2514/1. G008107
work page doi:10.2514/1 2024
-
[56]
Yu Song and Shengping Gong. Solar-sail deep space trajectory optimization using successive convex pro- gramming.Astrophysics and Space Science, 364(7):106, July 2019. ISSN 0004-640X, 1572-946X. doi: 10.1007/s10509-019-3597-x
-
[57]
Lossless Control-Convex Formulation for Solar-Sail Trajectory Optimiza- tion via Sequential Convex Programming.Journal of Guidance, Control, and Dynamics, pages 1–16, November
Kenshiro Oguri and Gregory Lantoine. Lossless Control-Convex Formulation for Solar-Sail Trajectory Optimiza- tion via Sequential Convex Programming.Journal of Guidance, Control, and Dynamics, pages 1–16, November
-
[58]
ISSN 0731-5090, 1533-3884. doi: 10.2514/1.G008361
-
[59]
Ryan S. Park, William M. Folkner, James G. Williams, and Dale H. Boggs. The JPL Planetary and Lunar Ephemerides DE440 and DE441.The Astronomical Journal, 161(3):105, February 2021. ISSN 1538-3881. doi: 10.3847/1538-3881/abd414
-
[60]
M. J. H. Walker, B. Ireland, and Joyce Owens. A set of modified equinoctial orbit elements.Celestial Mechanics, 36(4):409–419, August 1985. ISSN 1572-9478. doi: 10.1007/BF01227493
-
[61]
John L. Junkins and Ehsan Taheri. Exploration of Alternative State Vector Choices for Low-Thrust Trajectory Optimization.Journal of Guidance, Control, and Dynamics, 42(1):47–64, January 2019. ISSN 0731-5090, 1533-3884. doi: 10.2514/1.G003686
-
[62]
Ch. Hubaux, A. Lemaître, N. Delsate, and T. Carletti. Symplectic integration of space debris motion considering several Earth’s shadowing models.Advances in Space Research, 49(10):1472–1486, May 2012. ISSN 0273-1177. doi: 10.1016/j.asr.2012.02.009
-
[63]
Robert W. Bryant. The Effect of Solar Radiation Pressure on the Motion of an Artificial Satellite. Technical Report NASA-TN-D-1063, September 1961
1961
-
[64]
Miles Lubin, Oscar Dowson, Joaquim Dias Garcia, Joey Huchette, Benoît Legat, and Juan Pablo Vielma. JuMP 1.0: Recent improvements to a modeling language for mathematical optimization.Mathematical Programming Computation, 15(3):581–589, September 2023. ISSN 1867-2949, 1867-2957. doi: 10.1007/s12532-023-00239-3
-
[65]
Gurobi Optimizer Reference Manual, 2025
Gurobi Optimization, LLC. Gurobi Optimizer Reference Manual, 2025. URLhttps://www.gurobi.com
2025
-
[66]
Christopher Rackauckas and Qing Nie. DifferentialEquations.jl – A Performant and Feature-Rich Ecosystem for Solving Differential Equations in Julia.Journal of Open Research Software, 5(1):15, May 2017. ISSN 2049-9647. doi: 10.5334/jors.151. 29 Station-Keeping Approach for Extremely Low Lunar Orbits with Solar Sailing
-
[67]
Forward-Mode Automatic Differentiation in Julia, July 2016
Jarrett Revels, Miles Lubin, and Theodore Papamarkou. Forward-Mode Automatic Differentiation in Julia, July 2016
2016
-
[68]
A common interface for automatic differentiation, 2025
Guillaume Dalle and Adrian Hill. A common interface for automatic differentiation, 2025. URL https: //arxiv.org/abs/2505.05542
arXiv 2025
-
[69]
MOSEK Optimizer API for Julia 11.0.28, 2025
MOSEK ApS. MOSEK Optimizer API for Julia 11.0.28, 2025. URL https://docs.mosek.com/latest/ juliaapi/index.html
2025
-
[70]
Erwan Mazarico, Gregory A. Neumann, Michael K. Barker, Sander Goossens, David E. Smith, and Maria T. Zuber. Orbit determination of the Lunar Reconnaissance Orbiter: Status after seven years.Planetary and Space Science, 162:2–19, November 2018. ISSN 0032-0633. doi: 10.1016/j.pss.2017.10.004
-
[71]
B. D. Tapley and B. E. Schutz. Estimation of unmodeled forces on a lunar satellite.Celestial mechanics, 12(4): 409–424, December 1975. ISSN 1572-9478. doi: 10.1007/BF01595388. 30
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.